一种纳米药粉烟雾喷药低空药物浮沉方法及无人机喷药系统与流程
1.本发明涉及农业技术领域,具体为一种纳米药粉烟雾喷药低空药物浮沉方法及无人机喷药系统。
背景技术:
2.随着无人机的快速发展,目前无人机已广泛运用于警用、城市管理、农业、地质、气象、电力、抢险救灾、视频拍摄等多个行业。近些年来,以其精准、智能、高效的特性,无人机在植物保护、有害生物防治等诸多方面迅速获得了大众的认可。
3.专利公开号为cn109292095a,提供了一种纳米药粉烟雾喷药无人机及其喷药系统、喷药方法,该系统包括药粉入口1、雾化器2、电磁脉冲点火装置 3、二次反应室4、曲位扰流控制装置5和烟药高速喷口6,通过先将药粉充分混合并雾化,经电磁脉冲点火通过高压电进行反应,并利用高温高压进行二次烟化反应,从而将纳米级药粉转化成烟状进行喷洒,由于烟雾状的药物质量轻,效果好,喷洒时可以渗透进树林下层,从而解决人工林如桉树林的一般无人机药物喷洒不能渗透进入树林下层的缺点,但该系统在进行使用过程中操作人员无法知晓纳米药粉烟雾喷药内部烟雾状的药物量,若烟雾药量不足,操作人员无法对装置进行纳米药粉的补充,不仅造成农作物喷洒不广泛,还致使喷洒原件空转,有弊与影响装置使用寿命。
4.专利公开号为cn107839885a,提供了一种无人机的喷药装置,改装置虽能够对农作物进行喷洒,由于无人机存在续航时间和载荷限制,没有针对性的喷洒,使得作业达不到预期工效,影响作业进度。
技术实现要素:
5.本发明的目的在于提供了一种纳米药粉烟雾喷药低空药物浮沉方法及无人机喷药系统,达到操作人员能够快速获取纳米药粉烟雾喷药内部烟雾状的药物量,从而保证农作物喷洒广泛,以及操作人员可远程对该装置喷洒角度快速进行调整,从而有针对性的农作物喷洒,促使作业达到预期工效,加强作业进度的目的。
6.为实现上述目的,本发明提供如下技术方案:一种纳米药粉烟雾喷药低空药物浮沉方法及无人机喷药系统,包括无人机本体、定位座、药粉烟雾箱、定位柱、驱动盒、喷头、操控组件、烟雾喷射组件、轴承座、驱动马达、监控探头和测距传感器,所述无人机本体机架底部与监控探头的顶部连接,无人机本体机架外壁与定位座的内壁连接,定位座的底部与定位柱的顶部连接,定位柱的底部与轴承座的内圈连接,轴承座的底部与药粉烟雾箱的顶部连接,药粉烟雾箱的顶部与驱动马达的输出轴连接,驱动马达的外表面与驱动盒的内部连接,驱动盒的顶部与无人机本体的底部连接,药粉烟雾箱的正面与测距传感器的背面连接,烟雾喷射组件分别位于药粉烟雾箱的内外侧,操控组件的输出端与监控探头的输入端连接,测距传感器的输出端与操控组件的输入端连接,烟雾喷射组件的喷嘴与喷头的进口连接。
7.优选的,所述操控组件包括服务器终端、显示模块、加粉设备和控制器,服务器终端的输出端与控制器的输入端连接,服务器终端的输入端分别与显示模块和加粉设备的输出端连接。
8.优选的,所述烟雾喷射组件包括电磁点火装置、隔热箱、输送管、雾化器、输出管、连接管、气泵、烟雾传感器和分流器,雾化器的出口与输送管的进口连接,输送管的出口与隔热箱的进口连接,隔热箱的内侧顶部与电磁点火装置的顶部连接,隔热箱的出口与输出管的进口连接,输出管的出口与气泵的进口连接,气泵的出口与连接管的进口连接,连接管出口与分流器的进口连接,烟雾传感器的外表面与隔热箱的内壁连接。
9.优选的,所述烟雾传感器和测距传感器的输出端均与控制器的输入端连接。
10.优选的,所述控制器的输出端分别与无人机本体、驱动马达、监控探头、电磁点火装置、雾化器、气泵、烟雾传感器和分流器的输入端连接。
11.优选的,所述分流器的喷嘴与喷头的进口连接,分离器位于药粉烟雾箱的正下方。
12.优选的,所述药粉烟雾箱的进料口与雾化器的进口连接,加粉设备的出料口与药粉烟雾箱的进料口连接。
13.优选的,所述药粉烟雾箱的内壁分别与隔热箱和气泵的外表面连接,隔热箱位于气泵的正上方。
14.一种纳米药粉烟雾无人机喷药低空药物浮沉方法,包括以下步骤:
15.s1、药粉准备
16.通过筛网将纳米药粉内的杂质物清除,随后将纳米药粉导入到加粉设备 (703)内,通过其内部设置的搅拌装置使纳米药粉颗粒大小均匀化;然后装载到无人机的药粉烟雾箱内;
17.s2、喷雾
18.无人机起飞、达到待施药的果树、农作物上方10-25米的空域,进行喷雾作业:加粉设备(703)将处理后的纳米药粉输送到雾化器(804),并通过电磁点火装置(801)促使雾化后的纳米药粉转化成烟雾状,烟雾传感器 (808)的检测便于远程操控人员清晰掌握隔热箱(802)内部纳米药粉烟雾喷药的量;
19.气泵(807)的运行促使汇聚在隔热箱(802)内部顶端的烟雾快速下沉,并最终通过分流器(808)的传导,促使喷头(6)能够高速的喷洒喷药;
20.s3、浮沉
21.无人机喷出的纳米药粉烟雾下沉到达果树、农作物的叶面密集的高度后,在叶面及空气的共同作业下,部分附着在叶面上,部分仍保持烟雾状、在较长时间内悬浮停留在叶面之间,杀灭空气中病菌或害虫。
22.本发明提供的纳米药粉烟雾喷药低空药物浮沉方法及无人机喷药系统,具备以下有益效果:
23.(1)本发明通过将无人机喷出的纳米药粉烟雾下沉到达果树、农作物的叶面密集的高度后,在叶面及空气的共同作业下,部分附着在叶面上,部分仍保持烟雾状、在较长时间内悬浮停留在叶面之间,杀灭空气中病菌或害虫,可以达到施药量最小、杀灭效果最佳的目的;
24.(2)、本发明通过将加粉设备与药粉烟雾箱的进口连接,使纳米药粉首先进入到药
粉烟雾箱,接着在经过雾化器促使药粉充分混合并雾化,并通过输送管的传递,促使雾化后的药粉进入隔热箱内,并利用电磁点火装置促使雾化后的纳米药粉转化成烟雾状,最终经气泵和分流器的传导加快纳米药粉烟雾低空药物喷洒的速度,以及增加药物喷洒的区域,在药物进行喷洒的过程中,烟雾传感器可将隔热箱内部的药物反馈到显示模块上,以此达到操作人员能够快速获取纳米药粉烟雾喷药内部烟雾状的药物量,从而保证农作物喷洒广泛,避免药物喷洒存在遗落区域致使操作人员无法查询,保证药物喷洒作业装置运行稳定。
25.(3)、本发明通过改变喷头的喷洒角度,远程操作人员只需根据监控探头观察农作物喷洒的画面,接着在驱动马达的运行下,轴承座内圈便会围绕着定位柱的底部旋转,从而促使药粉烟雾箱在无人机本体角度调节稳定,达到远程操作人员可远程对该装置喷洒角度快速进行调整,从而有针对性的农作物喷洒,促使作业达到预期工效,加强作业进度的目的。
附图说明
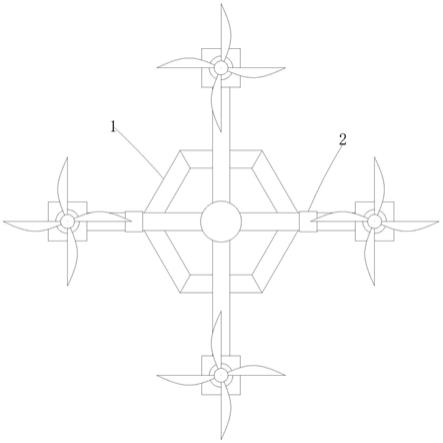
26.图1为本发明无人机的俯视结构示意图;
27.图2为本发明无人机的主视结构示意图;
28.图3为本发明整体的系统模块组成结构框图;
29.图4为本发明药粉烟雾箱的内部结构示意图。
30.图中:1无人机本体、2定位座、3药粉烟雾箱、4定位柱、5驱动盒、6 喷头、7操控组件、8烟雾喷射组件、9轴承座、10驱动马达、11监控探头、 12测距传感器、701服务器终端、702显示模块、703加粉设备、704控制器、 801电磁点火装置、802隔热箱、803输送管、804雾化器、805输出管、806 连接管、807气泵、808烟雾传感器、809分流器。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.实施例一:
33.参见图1-4,本发明提供的纳米药粉烟雾喷药低空药物浮沉无人机喷药系统,包括无人机本体1、定位座2、药粉烟雾箱3、定位柱4、驱动盒5、操控组件7、轴承座9、驱动马达10、监控探头11和测距传感器12,无人机本体 1机架底部与监控探头11的顶部固定连接,无人机本体1机架外壁与定位座 2的内壁固定连接,定位座2的底部与定位柱4的顶部固定连接,定位柱4的底部与轴承座9的内圈固定连接,轴承座9的底部与药粉烟雾箱3的顶部固定连接,药粉烟雾箱3的顶部与驱动马达10的输出轴固定连接,驱动马达10 的外表面与驱动盒5的内部固定连接,驱动盒5的顶部与无人机本体1的底部固定连接,药粉烟雾箱3的正面与测距传感器12的背面固定连接,操控组件7的输出端与监控探头11的输入端信号连接,测距传感器12的输出端与操控组件7的输入端信号连接,通过改变喷头6的喷洒角度,远程操作人员只需根据监控探头11观察农作物喷洒的画面,接着在驱动马达10的运行下,轴承座9内圈便会围绕着定位柱4的底部旋转,从而促使药粉烟雾箱3在无人机本体1角度调节稳定,达到
远程操作人员可远程对该装置喷洒角度快速进行调整,从而有针对性的农作物喷洒,促使作业达到预期工效,加强作业进度的目的。
34.在使用时,将加粉设备703与药粉烟雾箱3的进口连接,使纳米药粉首先进入到药粉烟雾箱3,接着在经过雾化器804促使药粉充分混合并雾化,并通过输送管803的传递,促使雾化后的药粉进入隔热箱802内,并利用电磁点火装置801促使雾化后的纳米药粉转化成烟雾状,最终经气泵807和分流器809的传导加快纳米药粉烟雾低空药物喷洒的速度,以及增加药物喷洒的区域,在药物进行喷洒的过程中,烟雾传感器808可将隔热箱802内部的药物反馈到显示模块702上,远程操作人员只需根据监控探头11观察农作物喷洒的画面,接着在驱动马达10的运行下,轴承座9内圈便会围绕着定位柱4 的底部旋转,从而促使药粉烟雾箱3在无人机本体1角度调节稳定,达到远程操作人员可远程对该装置喷洒角度快速进行调整。
35.一种纳米药粉烟雾无人机喷药低空药物浮沉方法,包括以下步骤:
36.s1、药粉准备
37.通过筛网将纳米药粉内的杂质物清除,随后将纳米药粉导入到加粉设备 703内,通过其内部设置的搅拌装置使纳米药粉颗粒大小均匀化;然后装载到无人机的药粉烟雾箱内;
38.s2、喷雾
39.无人机起飞、达到待施药的果树、农作物上方10-25米的空域,进行喷雾作业:加粉设备703将处理后的纳米药粉输送到雾化器804,并通过电磁点火装置801促使雾化后的纳米药粉转化成烟雾状,烟雾传感器808的检测便于远程操控人员清晰掌握隔热箱802内部纳米药粉烟雾喷药的量;
40.气泵807的运行促使汇聚在隔热箱802内部顶端的烟雾快速下沉,并最终通过分流器808的传导,促使喷头6能够高速的喷洒喷药;
41.s3、浮沉
42.无人机喷出的纳米药粉烟雾下沉到达果树、农作物的叶面密集的高度后,在叶面及空气的共同作业下,部分附着在叶面上,部分仍保持烟雾状、在较长时间内悬浮停留在叶面之间,杀灭空气中病菌或害虫。
43.本发明通过将加粉设备703与药粉烟雾箱3的进口连接,使纳米药粉首先进入到药粉烟雾箱3,接着在经过雾化器804促使药粉充分混合并雾化,并通过输送管803的传递,促使雾化后的药粉进入隔热箱802内,并利用电磁点火装置801促使雾化后的纳米药粉转化成烟雾状,最终经气泵807和分流器809的传导加快纳米药粉烟雾低空药物喷洒的速度,以及增加药物喷洒的区域,在药物进行喷洒的过程中,烟雾传感器808可将隔热箱802内部的药物反馈到显示模块702上,以此达到操作人员能够快速获取纳米药粉烟雾喷药内部烟雾状的药物量,从而保证农作物喷洒广泛,避免药物喷洒存在遗落区域致使操作人员无法查询,保证药物喷洒作业装置运行稳定,本发明通过改变喷头6的喷洒角度,远程操作人员只需根据监控探头11观察农作物喷洒的画面,接着在驱动马达10的运行下,轴承座9内圈便会围绕着定位柱4的底部旋转,从而促使药粉烟雾箱3在无人机本体1角度调节稳定,达到远程操作人员可远程对该装置喷洒角度快速进行调整,从而有针对性的农作物喷洒,促使作业达到预期工效,增强作业效果的目的。
44.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1