一种基于绳系的力跟随地外天体低重力环境模拟着陆试验系统的制作方法
1.本发明涉及一种基于绳系的力跟随地外天体低重力环境模拟着陆试验系统,属于地外天体着陆试验技术领域。
背景技术:
2.随着人类航天技术的不断发展,人类的太空探索活动已经从近地空间向更深更远的宇宙空间不断延伸。美国已经实现了载人月球登陆,并多次成功实现了火星着陆探测。深空探测过程中从接近地外天体,到在地外天体表面着陆的过程称为:进入、减速与着陆工作段,即edl段,edl段对于整个探测任务的成败起着至关重要的任务。以火星着陆探测为例,目前人类进行的火星着陆任务中仅有43%的成功率,而大多数任务都在edl段失败。因此国内外在航天器研制过程中进行了大量的地面试验,对航天器在edl段工作性能进行评估。
3.在这些地面试验中主要对于地外星体低重力水平的模拟是试验的重要保障条件之一。低重力模拟通常有自由落体法、气悬浮法、水浮法和悬吊法等。其中自由落体法通过修建高塔,将试验装置从塔顶扔下,获得一定时间的低重力,但其成本高、且试验装置三维运动能力受限。气悬浮法是利用喷气浮力抵消重力,但主要用于二维空间,即水平面内模拟试验和操作,对于有产生推力的情况只能保障数量级不边,不能精确控制。水浮法是利用水的浮力和重力抵消的方法,但水浮法由于环境限制,对于有推进火焰的情况就不能使用了。悬吊法是通过吊索机构利用重力或其他驱动力抵消试验装置重力的方法,和其他三种方法对比,其试验时间自由,可进行三维空间模拟,且环境限制较小等优势,但缺少对应的低重力环境模拟着陆试验系统进行试验。
技术实现要素:
4.本发明解决的技术问题是:针对目前现有技术中,缺少对应的低重力环境模拟着陆试验系统进行试验的问题,提出了一种基于绳系的力跟随地外天体低重力环境模拟着陆试验系统。
5.本发明解决上述技术问题是通过如下技术方案予以实现的:
6.一种基于绳系的力跟随地外天体低重力环境模拟着陆试验系统,包括并联索系统、快速随动平台、快速随动水平装置、恒拉力触地装置、拉力精调装置、连接法兰、姿态锁紧装置、钢架结构,其中:
7.用于对快速随动平台进行移动及跟踪的并联索系统设置于钢架结构上,由钢架结构进行支撑,快速随动平台通过并联索系统的钢丝绳连接悬挂于空中,快速随动水平装置安装于快速随动平台上,与快速随动平台共同实现航天器试验装置着陆位置跟踪的精确控制,拉力精调装置安装于快速随动水平装置下,用于抵消试验装置重力作用,航天器试验装置通过连接法兰与拉力精调装置连接,恒拉力触地装置设置于航天器试验装置上以在触地瞬间抵消重力作用,姿态锁紧装置设置于航天器试验装置上,在航天器试验装置稳定后锁
紧以维持当前姿态。
8.所述航天器试验装置与拉力精调装置间的连接法兰上,设置有角度传感器,用于测量拉力精调装置的吊绳角度,当航天器试验装置进行水平方向运动时,角度传感器测量值会发生变化。
9.所述吊绳角度发生变化时,快速随动平台沿并联索系统的导轨向吊绳偏角变化的相反方向运动使吊绳偏角回零。
10.所述快速随动水平装置根据自身运动距离及速度判断是否到达快速随动平台边缘,若到达边缘则通过并联索系统带动快速随动平台在指定空间范围内移动以实现随动控制。
11.所述拉力精调装置通过电机驱动对航天器试验装置施加竖直向上的拉力以创造低重力环境。
12.本发明与现有技术相比的优点在于:
13.本发明提供的一种基于绳系的力跟随地外天体低重力环境模拟着陆试验系统,采用并联索系统驱动,快速随动平台与姿态锁紧装置的设计以实现低重力环境的着陆试验,通过两级随动控制设计实现大范围三维移动,能够利用拉力精调装置实现低重力环境模拟,具备从减速降落段开始至触地的全过程低重力模拟试验空间大、精度高、响应迅速、承载能力大。
附图说明
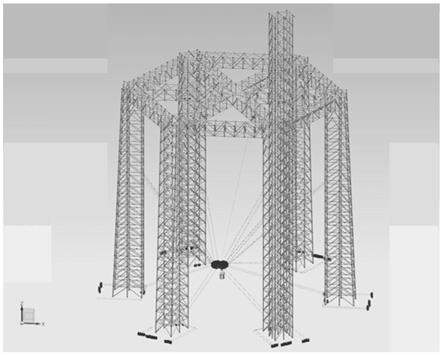
14.图1为发明提供的并联索系统结构示意图;
15.图2为发明提供的快速随动平台结构示意图;
16.图3为发明提供的拉力精调装置结构示意图;
17.图4为发明提供的主提升索系统结构示意图;
18.图5为发明提供的单套主提升索结构示意图;
19.图6为发明提供的上水平索驱动系统结构示意图;
20.图7为发明提供的单套水平索系统结构示意图;
21.图8为发明提供的下斜拉索驱动系统结构示意图;
具体实施方式
22.一种基于绳系的力跟随地外天体低重力环境模拟着陆试验系统,能够实现低重力环境下的着陆试验,可跟随试验装置进行大范围三维移动,主要包括并联索系统、快速随动平台、快速随动水平装置、恒拉力触地装置、拉力精调装置、连接法兰、姿态锁紧装置、钢架结构,各部分结构具体连接关系为:
23.并联索系统设置于钢架结构上,由钢架结构进行支撑,快速随动平台通过并联索系统的钢丝绳连接悬挂于空中,快速随动水平装置安装于快速随动平台上,,拉力精调装置安装于快速随动水平装置下,航天器试验装置通过连接法兰与拉力精调装置连接,恒拉力触地装置及姿态锁紧装置均设置于航天器试验装置上,具体为:
24.并联索系统用于对快速随动平台进行移动及跟踪,快速随动水平装置与快速随动平台共同实现航天器试验装置着陆位置跟踪的精确控制,拉力精调装置用于抵消试验装置
重力作用,恒拉力触地装置设置于航天器试验装置上以在触地瞬间抵消重力作用,姿态锁紧装置在航天器试验装置稳定后锁紧以维持当前姿态。
25.其中,航天器试验装置与拉力精调装置间的连接法兰上,设置有角度传感器,用于测量拉力精调装置的吊绳角度,当航天器试验装置进行水平方向运动时,角度传感器测量值会发生变化;
26.吊绳角度发生变化时,快速随动平台沿并联索系统的导轨向吊绳偏角变化的相反方向运动使吊绳偏角回零;
27.快速随动水平装置根据自身运动距离及速度判断是否到达快速随动平台边缘,若到达边缘则通过并联索系统带动快速随动平台在指定空间范围内移动以实现随动控制;
28.拉力精调装置通过电机驱动对航天器试验装置施加竖直向上的拉力以创造低重力环境。
29.低重力环境模拟着陆试验系统的具体工作原理如下:
30.航天器试验装置通过连接法兰上的角度传感器感受吊绳偏角,试验装置发生水平方向运动则角度传感器值会发生变化,安装在快速随动平台上的控制系统感受到吊绳偏角变化后,即沿导轨向吊绳偏角变化的相反方向运动,使吊绳偏角回零,从而达到第一级水平跟随;
31.快速随动水平装置根据自身运动距离和速度判断是否到达随动平台边缘,若到达快速随动平台边缘则并联索系统在电机驱动下,带动快随随动平台在指定范围内移动,实现两级随动控制的同时,能够达到试验装置三维空间随动功能的控制目的。
32.其中,拉力精调装置通过电机对试验装置施加竖直向上的拉力抵消试验装置自身重力,从而创造低重力环境,当试验装置产生向上的推力时,安装在连接法兰上的力传感器感受到拉力变化并反馈至拉力精调装置电机,电机开始放绳从而达到减小掉绳拉力,保持试验装置低重力水平状态。
33.下面结合具体实施例进行进一步说明:
34.在本实施例中,并联索系统如图1所示,快速随动平台如图2所示,拉力精调装置如图3所示,主提升索系统如图4所示,单套主提升索如图5所示,上水平索驱动系统如图6所示,单套水平索系统如图7所示,下斜拉索驱动系统如图8所示,其中:
35.并联索系统、快速随动平台、快速随动水平装置、恒拉力触地装置、拉力精调装置、连接法兰、姿态锁紧装置、钢架结构的结构关系固定,并联索系统具体包括主提升索系统、上水平索驱动系统、下斜拉索驱动系统,主提升索系统由6组双电机驱动系统组成,上水平所驱动系统由6组双电机驱动系统组成,下斜拉索驱动系统由6组双电机驱动系统组成,并联索驱动系统对18组双电机驱动系统均进行相同的运动控制。
36.快速随动平台用于承载快速随动水平装置和拉力精调装置,同时与并联索系统的钢丝绳连接,快速随动平台上布置正交方向两组轨道,水平随动装置通过4个电机齿轮驱动系统,使拉力精调装置沿轨道东西、南北水平运动,快速随动水平装置工作在随动控制方式,以实现水平快速随动系统中的上吊点对被测试验装置的精确跟踪,探测器的位置由连接法兰上的编码器和陀螺惯导系统检测,系统可以实现全闭环控制。绝对编码器角度检测精度可达0.011
°
,陀螺系统的漂移小于0.01
°
/小时,工作温度-40℃~75℃,属于高精度、宽温度陀螺仪。吊绳倾角传感器的检测精度可达0.03
°
。控制输入来自于试验装置的水平移
动。
37.拉力精调装置由粗精两级调节机构组成,安装在快速随动装置的两维工作台上,包括三台伺服电机、力传感器和传动机构。其中,功率较大的两台伺服电机完成拉力粗控制,起卸荷作用,可承载大部分试验设备拉力载荷,以保证小功率伺服电机具有合适的拉力调节范围。其中小功率伺服电机工作在拉力闭环控制方式,实现拉力的精确控制。
38.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1