使用固定前倾旋翼来模拟刚性机翼空气动力学的垂直起降飞行器的制作方法
使用固定前倾旋翼来模拟刚性机翼空气动力学的垂直起降飞行器
1.相关申请的交叉引用
2.本技术要求2019年5月21日申请的mikic的美国临时专利申请第62/850,943号的优先权,其通过完整引用合并到此。本技术是2017年11月2日申请的mikic等人的美国专利申请第15/802,386号的部分接续申请,所述美国专利申请第15/802,386号要求2016年11月2日申请的mikic等人的美国临时专利申请第62/416,168号的优先权,它们通过完整引用合并到此。
技术领域
3.本发明涉及航空载具,一种使用旋翼来模拟刚性机翼空气动力学的航空载具。
附图说明
4.图1a-图1d是根据本发明一些实施例的具有使用堆叠反向旋转螺旋桨的合成机翼的航空载具的阴影效果图。
5.图2a-图2d是根据本发明一些实施例的具有使用堆叠反向旋转螺旋桨的合成机翼的航空载具的绘图。
6.图3是根据本发明一些实施例的向前飞行中的航空载具的解决方案图。
7.图4a-图4b是根据本发明一些实施例的具有合成机翼的航空载具的阴影效果图。
8.图5a-图5c是根据本发明一些实施例的具有合成机翼的航空载具的绘图。
9.图6a-图6g是各种参数值的升力阻力曲线。
10.图7是根据本发明一些实施例的具有使用纵向交错旋翼的合成机翼的航空载具的视图。
11.图8是根据本发明一些实施例的具有使用垂直交错旋翼的合成机翼的航空载具的视图。
12.图9a-图9e是说明用于不同载具配置的升力的均匀性的示意图。
13.图10a-图10b是根据本发明一些实施例的旋翼的视图。
14.图11a-图11d是根据本发明一些实施例的具有翼尖旋翼的航空载具视图。
15.图12a-图12b是根据本发明一些实施例的具有翼尖旋翼的航空载具侧视图。
16.图13a-图13c是根据本发明一些实施例的旋翼整流罩的视图。
17.图14a-图14c是根据本发明一些实施例的具有整流罩和叶片的旋翼视图。
18.图15a-图15e是根据本发明一些实施例的翼梁和旋翼组件的视图。
19.图16a-图16d是根据本发明一些实施例的具有堆叠旋翼的航空载具视图。
20.图17a-图17d是根据本发明一些实施例的具有前后翼尖旋翼的航空载具的视图。
技术实现要素:
21.一种垂直起飞和降落的飞行器,其使用固定的旋翼进行垂直起降(vtol)和向前飞
行操作。旋翼形成合成机翼并且被定位成可实现高翼展效率。旋翼被定位成可以使跨越合成机翼翼展的升力均匀。机翼旋翼向前倾斜并且在水平飞行期间提供一些向前推进力。机翼旋翼可以固定在向前倾斜的配置中。
具体实施方式
22.在本发明的一些实施例中,一种航空载具,其具有被配置为用作合成机翼或伪机翼(pseudo-wing)的旋翼的阵列。旋翼相对于航空载具主体并且相对于彼此定位,使得旋翼阵列的升力沿着伪机翼的翼展具有相对均匀的升力。合成机翼产生(相对)均匀的升力和相对均匀的尾部垂直速度(气流下洗)。脱落涡度(shed vorticity)集中在机翼尖端,类似于传统翼型机翼。
23.在一些实施例中,旋翼固定地安装到连结到航空载具主体的结构。旋翼可以沿着航空载具的纵向轴线交错,使得沿着纵向轴线的差别推力允许载具向前倾斜,以便从旋翼提供向前推力分量。在一些方面,俯仰控制也可以使用其它方式来实现,例如升降舵控制。在一些实施例中,旋翼可以具有一些可铰接的方面。在一些方面,飞行器通过区别对待旋翼的推力而无需其它控制表面来控制俯仰、侧倾和偏航。在一些方面,飞行器没有用于姿态控制的其它可控表面。
24.在一些实施例中,组成合成机翼的旋翼阵列可以在旋翼前面具有短弦前部机翼。由于航空载具在起飞期间使用旋翼获得垂直推力,因此航空载具在起飞操作期间不需要来自传统机翼的显著升力。在较高空速操作期间,短弦长的前部机翼允许向前飞行期间的升力。航空载具也可以在旋翼后面具有短的后部机翼。具有短弦长的后部机翼可以在较高速度向前飞行操作期间提供升力。后部机翼也可以使伪机翼的气流下洗更加均匀。前部机翼和后部机翼可以用作支撑支柱的结构元件,所述支柱支撑旋翼。前部机翼和后部机翼可以在外侧端接合,这样可以增加强度和稳定性。此外,位于旋翼阵列外侧(在水平平面内)周围的前部机翼和后部机翼为用户和地面人员提供了安全元素,作为旋翼旋转叶片周围的防护罩。
25.在一些实施例中,可能只有尾部机翼。在一些实施例中,可能只有前缘机翼。在一些实施例中,既有前部机翼也有尾部机翼。在一些实施例中,存在中央机翼,其可以在中央机翼的前面和后面具有旋翼。
26.在一些实施例中,一个或多个旋翼用来提供向前推力。在一些方面,可以在航空载具的后部使用单个推进器旋翼。在一些实施例中,机翼旋翼的旋转轴可以相对于垂直方向倾斜。在一些实施例中,机翼旋翼可以向前倾斜。向前倾斜的机翼旋翼有助于向前飞行期间航空载具的向前推力。在一些实施例中,向前飞行期间的总向前推力来自向前倾斜的机翼旋翼和其旋转轴线平行于航空载具侧倾轴线的一个或多个传统旋翼的组合。
27.航空载具可以构造成使得在向前飞行中由机翼和机翼旋翼提供升力,并且由尾部螺旋桨和向前倾斜的机翼旋翼提供向前推进力。
28.在平衡其它飞行器参数的同时,可以寻求向前飞行期间飞行器的效率(升力/阻力比)尽可能高。例如,向前飞行期间旋转的机翼旋翼的尖端速度与向前飞行期间飞行器的速度的比率是设计效率时要考虑的重要比率。而且,由机翼旋翼提供的升力相对于总升力(机翼加机翼旋翼)的百分比是设计效率时要考虑的重要比率。此外,机翼旋翼之间的功率分布
与传递到机翼旋翼和传统向前推进螺旋桨(例如尾部旋翼)的总功率的比率是设计效率时要考虑的重要比率。这些比率之间的相互作用可能是复杂的并且进行明显的优化。一个基本的设计参数是机翼旋翼在垂直起飞和降落期间提供足够的垂直推力,以使飞行器安全地起飞和降落。
29.根据本发明实施例的航空载具适于使用机翼旋翼进行垂直起飞和降落。起飞时,机翼旋翼旋转到它们的悬停转速(rmp)范围内的速度。在机翼旋翼的旋转轴相对于航空载具的水平轴线向前倾斜的实施例中,航空载具将在起飞和降落期间向上倾斜,使得机翼旋翼的平面是水平的。起飞后,航空载具可以使向前推动(或拉动)螺旋桨(例如尾部旋翼)旋转起来,而机翼旋翼仍处于动力状态。随着航空载具获得前进速度,升力由前部机翼和尾部机翼产生,或者在其它实施例中,升力由中央机翼产生,而且机翼旋翼提供的升力的比例降低。当飞行器接近其巡航速度时,机翼旋翼的转速(rmp)通常会降低,但它们会保持动力并且提供航空载具的总升力的一部分。在一些方面,机翼旋翼的功率可以降低,使得它们提供可以忽略不计的升力,但是在旋转并且能够迅速地旋转起来以提供飞行器的姿态控制。
30.根据本发明实施例的航空载具将能够进行悬停、起飞、降落和向前飞行,包括通过操纵各个旋翼的速度来进行所有需要的机动和姿态调整,而不需要任何其它控制表面。在一些实施例中,航空载具将没有副翼、或升降舵、或任何其它可控的控制表面。在这种情况下,使用固定的倾斜旋翼进行姿态控制,设计和系统的总体简单性提供了显著的优势。在一些实施例中,用于每个机翼的机翼旋翼沿着直线或沿着曲线布置,每个旋翼都远离飞行器主体。机翼旋翼也可以是前掠或后掠配置,使得旋翼沿着飞行器的侧倾轴线处于不同的位置。在其它实施例中,存在分别位于机翼和飞行器质心前面和后面的前部旋翼和后部旋翼。通过沿着侧倾轴线的差别位置,机翼旋翼能够围绕俯仰轴线提供控制。通过以远离飞行器主体的距离间隔开,机翼旋翼能够围绕侧倾轴线提供控制。
31.在一些方面,飞行器每一侧上的一些旋翼可以朝第一方向旋转,而其它旋翼则朝相反方向旋转。在这种情况下,可以通过改变朝第一方向旋转的旋翼相对于朝相反方向旋转的旋翼的速度和/或扭矩来控制偏航。在一些方面,飞行器主体每一侧上的旋翼可以设置为略微不同的前倾角。在这种情况下,可以通过改变不同旋翼的相对速度和/或推力以及略微不同的倾斜角来实现偏航控制。
32.在一些实施例中,如图1a-图1d的阴影效果图和图2a-图2d的线条图中所示,航空载具100具有连结到使用堆叠反向旋转螺旋桨的右合成机翼102和左合成机翼103的主体101。在该示例性实施例中,通过短弦前部机翼107和短弦尾部机翼108,多个旋翼组件104沿着翼展长度定位。旋翼组件104安装在翼展支撑件109上,翼展支撑件109连结到前部机翼107和尾部机翼108。机翼尖端部分110将前部机翼107接合到尾部机翼108。
33.旋翼组件104可以具有第一螺旋桨105和第二螺旋桨106。在一些方面,第一螺旋桨105和第二螺旋桨106沿相反方向上旋转。在这样的配置中,一个螺旋桨的前缘在旋翼的旋转轴的外侧前进,而另一螺旋桨的的前缘在螺旋桨的旋转轴的内侧前进。在向前飞行模式中,螺旋桨叶片向前进入盛行空速风时将具有比相对于盛行空速风向后倾斜时更高的推力。使用反向旋转的同轴螺旋桨,旋翼轴内侧和外侧的向下推力是均匀的。
34.在一示例性实施例中,航空载具可以容纳一名乘客并且具有315kg的起飞质量。机翼的翼展可以是6m,并且载具的长度可以是3.5m,具有1.5米的高度。伪机翼可以均为4个同
轴旋翼组件,每个同轴旋翼组件具有一对反向旋转的螺旋桨。每一个螺旋桨具有3个叶片,75%半径处的叶片弦为0.05m。航空载具具有平均弦长为0.5m的短弦前翼和平均弦长为0.75m的短弦后翼。理想巡航速度为100节(knots),最高巡航速度为150节。理想巡航功耗是20kw,而且悬停模式下的功耗是80kw。电池质量是50kg,而且载具的续航里程是50英里。
35.合成机翼的一方面是旋翼被配置为沿着合成机翼的翼展提供相对均匀的推力。一种方法如上所述,其中,旋翼组件上的反向旋转的螺旋桨沿着伪机翼的翼展彼此相邻安置。另一种不使用同轴反向旋转的螺旋桨的方法是使螺旋桨具有重叠的向后倾斜和前进叶片区域。例如,可以安置具有在外侧上的向前移动叶片、在内侧上向后倾斜的旋翼。就在这个旋翼的内侧可以是另一个旋翼,其向前移动的叶片在外侧。旋翼可以垂直间隔开以允许这种重叠。在一些方面,旋翼可以沿着纵向轴线间隔开以允许这种重叠。
36.图3图示了合成机翼的功能方面,使用在载具主体的每一侧具有三个反向旋转的旋翼组件的航空载具作为示例性实施例。图的左手侧图示了机翼后面的垂直速度,而且图的右手侧表示涡度的大小。合成机翼的设计目标是减少跨越合成机翼翼展的升力变化。通过对机翼后面的垂直速度进行建模,升力沿着机翼翼展的减小的变化可以变得明显。图的左手侧图示了沿翼展的相对稳定的垂直速度量,证明使用三个反向旋转的旋翼组件的合成机翼在空气动力学意义上与使用实心翼型构造的常规机翼一样起作用。
37.图的右手侧图示了沿着机翼翼展及其翼尖处的涡度大小。如上所述,沿着翼展的垂直速度的均匀度应该作为第一近似值表示涡度大小的相称均匀度。当使用排列为合成机翼的旋翼时,确实有可能沿着翼展引入高涡度点。旋翼的位置对于使沿着翼展的脱落涡度的大小最小化是非常重要的。
38.虽然图3中所示的结果表示被建模的合成机翼的输出,但可以理解的是,在与叶片位置随时间变化有关的输出中存在一定量的时间相关变化。
39.在一些实施例中,如图4a-图4b中的阴影效果图和图5a-图5c中的线条图中所示,航空载具200具有连结到右合成机翼202和左合成机翼203的主体201,使用机翼安装旋翼。在该示例性实施例中,通过短弦前部机翼207和短弦尾部机翼208,多个机翼旋翼组件204沿着翼展长度定位。机翼旋翼组件204安装在翼展支撑件209上,翼展支撑件209连结到前部机翼207和尾部机翼208。机翼尖端部分210将前部机翼207接合到尾部机翼208。航空载具200不使用反向旋转的、堆叠的旋翼组件。虽然堆叠的组件在载荷分布方面可能具有明显的优势,但在水平飞行期间由旋翼传递的升力百分比较低的一些实施例中,可以使用单旋翼实现高效飞行,例如使用航空载具200。此外,单旋翼可降低成本和复杂性。
40.在一些方面,机翼旋翼组件204相对于飞行器的恒定高度巡航平面不是垂直的,而是以角度212向前倾斜。在一些方面,旋翼在5-20度的范围内向前倾斜。在一些方面,旋翼在5-15度的范围内向前倾斜。在一些方面,旋翼在8-20度的范围内向前倾斜。在一些方面,旋翼在8-12度的范围内向前倾斜。在示例性实施例中,旋翼倾斜10度。倾斜角度可以定义为旋翼轴线和最大机翼的的平均空气动力学弦线之间的角度,在一些实施例中,所述最大机翼可以是尾部机翼。
41.航空载具200具有适于在常规飞行期间提供水平推力的水平推进后部旋翼组件211。航空载具200的示例性实施例的尺寸和配置细节见表1。图10a-图10b示出了旋翼204,其具有它的中心轮毂221和叶片220,中心轮毂221可以包括电动马达。中心轮毂221可以在
其内部具有电动马达,并且可以具有适于在向前飞行配置时低阻力的外表面。
42.在一些方面,机翼旋翼组件204具有带有电动马达的旋转螺旋桨。在一些方面,水平推进后部旋翼组件211具有电动马达。在一些方面,马达由电源例如一个电池或多个电池供电。
43.44.[0045][0046]
表1
[0047]
向前倾斜的机翼旋翼组件的使用允许向前推进力由机翼旋翼组件部分地提供和由常规水平推进的螺旋桨部分地提供。在共享这种向前推进力时要考虑的一个因素是在向前巡航飞行期间传递到机翼旋翼的总功率相对于传递到机翼旋翼和常规螺旋桨二者的总功率的比例。
[0048]
另一个要考虑的因素是在向前飞行期间机翼旋翼承载的升力相对于机翼和机翼旋翼二者所提供的总升力的比例。在通过操纵机翼旋翼马达速度来诱导或维持包括侧倾控制的所有姿态控制的实施例中,由机翼旋翼提供的升力的比例必须高得足以使得机翼旋翼的操纵在控制飞行器姿态中是有效的。在一些方面,机翼旋翼在巡航速度下提供的升力的比例大于0.2。在一些方面,机翼旋翼提供的升力的比例大于0.25。在一些方面,机翼旋翼提供的升力的比例大于0.3。在一些方面,机翼旋翼提供的升力的比例大于0.1。所提供的升力的比例表示标称向前飞行中所有机翼旋翼相对于机翼的总和,但在一些方面,某些旋翼可能会被降低到较低的速度,以支持飞行器的空气动力学控制。在一些方面,一个或多个旋翼可以临时产生负升力以支持某些控制操作。
[0049]
另一个要考虑的因素是在向前飞行期间机翼旋翼的尖端速度相对于飞行器的速度的比率。当一个或多个机翼旋翼降低速度以减小其中一个机翼上的升力以实现侧倾时,该因素可能会起作用。在这种机动中,其它机翼上的机翼旋翼可以加快旋转以增加升力。当以飞行器速度的低倍数标称地运行时,向后倾斜的旋翼叶片上会出现失速风险。在一些方面,标称巡航机翼旋翼尖端速度大于飞行器巡航速度的2.0倍。在一些方面,标称巡航机翼旋翼尖端速度大于飞行器巡航速度的2.5倍。在一些方面,标称巡航机翼旋翼尖端速度大于飞行器巡航速度的1.5倍。在一些方面,标称巡航机翼旋翼尖端速度大于飞行器巡航速度的1.0倍。在一些方面,标称巡航机翼旋翼尖端速度可以低至大于飞行器巡航速度的0.5倍。尖端速度被理解为叶片的角速度乘以它们的径向长度。
[0050]
上面讨论的因素已经被建模以确定航空载具200的升阻比l/de(有效阻力),作为机翼的尖端速度与飞行器前进速度与飞行器迎角的函数,并且该数据已经通过图形表示。升阻比可以视为表示升阻比的彩色编码。升阻比(有效阻力)是飞行器的组合轴功率除以飞行器前进速度。覆盖该彩色编码的是表示上述的其它因素的等高线;传递到机翼旋翼的总功率的比例(红色线条),机翼旋翼所承载的升力的比例(蓝色线条),以及飞行器速度(黑色线条)。升阻比是在机翼旋翼的不同前倾角以及不同的机翼旋翼桨距下建模的。如图6a中所示,通过在飞行器200的巡航速度范围(50-75m/s)之间的图表部分中加上括号,并通过审视机翼旋翼尖端速度与飞行器速度比超过2.0的区域,发现不明显的参数范围给出了具有最高升阻比的运行模式。机翼旋翼尖端速度与飞行器速度之比为2.0,与机翼旋翼所承载升力与旋翼和机翼总升力之比为0.1的比例线很好地吻合,在该升力比下,机翼旋翼将提供一定
量的升力,以实现足够的飞行器姿态控制。优选的结果是使升阻比在上述约束值内高于8,9或10的更高比率甚至更理想。如图6a所示,在旋翼前倾10度时分析的飞行器能够在一定的飞行器速度范围内以高于2的尖端速度比、高于0.1(或更高)的升力比运行,在各种飞行器速度下l/de比率超过8。
[0051]
图6a-图6g是对不同型号航空载具的上述参数进行加权的cfd结果。图6a示出了上面讨论的航空载具200的结果。轮廓601形成围绕由巡航速度50m/s和75m/s所界定并且在大于2.0的旋翼尖端速度与飞行器速度比之上的区域的边界。如图所示,存在l/de大于8的的显著区域,包括大于9的和一些大于10的显著区域。这表示具有10度向前倾斜的机翼安装旋翼的该载具可以在各种操作场景中实现这些l/de比率。
[0052]
图6b示出了具有0度向前倾斜的旋翼的类似载具。如图所示,在2.0速度比率线之上几乎没有l/de高达9的区域。
[0053]
图6c示出了具有20度倾斜的旋翼的类似载具。如图所示,没有l/de高于8的区域可用于操作。通过对比图6b和6c中分别为0度和20度向前倾斜的l/de,可以看出例如10度倾斜的优点。在标出的区域601内,为了达到基于飞行使用考虑的优化设计,还进行了其他设计权衡。
[0054]
图6d示出了类似载具,其具有0度向前倾斜的旋翼但旋翼叶片具有比图6b的情况多5度的倾斜。如图所示,在2.0速度比率线之上几乎没有l/de高达8的区域。
[0055]
图6e示出了类似载具,其具有10度向前倾斜的旋翼但旋翼叶片具有比图6a的情况多5度的倾斜。如图所示,在2.0速度比率线之上几乎没有l/de高达8的区域,尽管相对于旋翼叶片多5度倾斜的其他情况,这似乎是最佳的。
[0056]
图6f示出了类似载具,其具有20度向前倾斜的旋翼但旋翼叶片具有比图6c的情况多5度的倾斜。如图所示,在2.0速度比率线之上几乎没有l/de高达9的区域,尤其是在水平飞行区域(0度aoa)。
[0057]
在本发明的一些实施例中,如图7中所示,具有左侧合成机翼202(右侧合成机翼未示出)的航空载具200具有沿着纵轴交错的旋翼。内侧旋翼207具有其螺旋桨208的前进方向侧和返回侧209。内侧旋翼207的返回侧209沿着伪机翼202的翼展方向与下一个旋翼204的前进方向侧显著地重叠。这种情况对后续旋翼205、206重复。由于向前飞行速度增加了螺旋桨旋转的向前行进部分上的升力,因此相邻旋翼前进方向侧和返回侧的这种显著重叠使向前飞行期间所提供的升力均匀。
[0058]
在本发明的一些实施例中,如图8中所示,具有左侧合成机翼301和右侧合成机翼302的航空载具300具有沿着合成机翼的翼展垂直地交错的旋翼。内侧旋翼303具有其螺旋桨307的前进方向侧和返回侧308。内侧旋翼303的返回侧308沿着合成机翼301的翼展方向与下一个旋翼304的前进方向侧显著地重叠。这种情况对后续旋翼和另一个机翼的旋翼305、306重复。由于向前飞行速度增加了螺旋桨旋转的向前行进部分上的升力,因此相邻旋翼前进方向侧和返回侧的这种显著重叠使向前飞行期间所提供的升力均匀。
[0059]
图9a-图9e示出了传统机翼和合成机翼的翼展方向升力分布。图9a示出了假设的均匀翼展方向升力分布,如在传统机翼中所看见的。图9b-图9e示出了各种类型的合成机翼的升力分布曲线图,其中,每个升力分布曲线图与椭圆理想升力分布(见虚线)形成对比。相对于理想负载的实心翼型机翼,具有更均匀翼展方向升力分布的旋翼阵列配置将提供较低
的诱导阻力比。与较少的较大旋翼相比,使用较大数量的较小旋翼的一个方面是,对于给定的翼展长度,总叶片面积较小,阻力较小。通常,对于给定的总升力和尖端速度,平均叶片弦不随旋翼的数量而变化,因此较小的旋翼具有更有利的宽高比(半径与平均弦比)。
[0060]
图9b示出了4旋翼系统(每个合成机翼2个旋翼)。由于旋翼配置,负载变化为20%。该配置的诱导阻力与理想负载机翼的诱导阻力之比为1.22。图9c示出了8旋翼系统(每个合成机翼4个旋翼)。由于旋翼配置,负载变化为20%。该配置的诱导阻力与理想负载机翼的诱导阻力之比为1.43。
[0061]
图9d示出了4旋翼系统(每个合成机翼2个旋翼)。由于旋翼配置,负载变化为40%。该配置的诱导阻力与理想负载机翼的诱导阻力之比为1.88。图9e示出了8旋翼系统(每个合成机翼4个旋翼)。由于旋翼配置,负载变化为40%。该配置的诱导阻力与理想负载机翼的诱导阻力之比为2.71。
[0062]
图10a-图10b示出了根据本发明的一些实施例的旋翼。如图所示,在旋翼叶片221的内侧端存在旋翼221的显著半径(如表1和表2中所标出尺寸)。在这种配置中,与叶片进一步朝向旋转轴选定路线的配置相比,旋翼叶片的内侧端不太容易使其向后倾斜的叶片失速。旋翼的该中心区域允许将单个马达安置在旋翼的外表面内(或反向旋转的叶片配置中的一对马达)。因此,旋翼叶片可以在马达本身的径向外侧(相对于旋转轴)开始。
[0063]
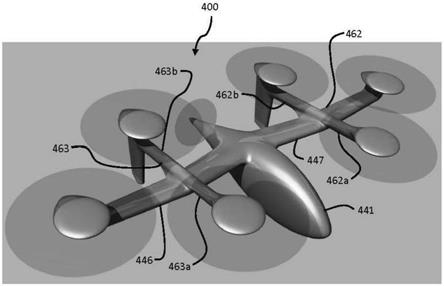
在一些实施例中,如图11a-图11d和图12a-12b所示,航空载具400利用根据本发明其它实施例的前倾旋翼。航空载具400具有带有左机翼447和右机翼446的载具主体441。如图11c中的俯视图所示,左机翼447具有内部部分447a和外部部分447b。右机翼446具有内部部分446a和外部部分446b。机翼446、447可以是部分前掠机翼,其中内部部分446a、447a前掠而且外部部分446b、447b向后掠。如图所示的机翼446、447的配置允许机翼的空气动力学中心在航空载具的质心的后面,这可以增强向前飞行中航空载具的控制和稳定性。此外,可能希望在飞行员位置的后面将机翼连结到航空载具的主体。在一些方面,存在将机翼连结到主体并相互连结的内部结构元件,其可以横穿航空载具主体的内部。而且,这些内部结构元件可以位于飞行器主体的顶部,因为机翼可以在飞行器主体的顶部或靠近飞行器主体的顶部在结构上连结到飞行器主体。使用这种较高高度的连结和相关的内部结构支撑件,当飞行员坐在飞行器主体中时,机翼可能需要在飞行员头部后面连结到飞行器主体。前掠的内部部分446a、447a允许机翼的向后连结以支持上述考虑。然后,外部部分446b、447b上的机翼掠的改变用于使机翼的整体纵向空气动力学中心向后,以支持控制和稳定性考虑。这种机翼配置也支持紧凑的设计,这将在下面进一步讨论。
[0064]
航空载具400具有连结到右侧机翼446和左侧机翼447的主体441,并且具有多个安装在机翼上的旋翼组件。右侧前部内侧旋翼组件448和右侧后部内侧旋翼组件452安装在连结到右侧机翼446的翼展支撑件463上。右侧外侧旋翼组件456位于右侧机翼446的尖端。右侧外侧旋翼组件456的叶片457在向前飞行中在固定机翼446外侧的区域461中提供升力,这加宽了机翼的有效翼展。左侧前部内侧旋翼组件450和左侧后部内侧旋翼组件454安装在连结到左侧机翼447的翼展支撑件462上。左侧外侧旋翼组件458位于左侧机翼447的尖端。左侧外侧旋翼组件458的叶片459在向前飞行中在固定机翼447外侧的区域460中提供升力,这加宽了机翼的有效翼展。
[0065]
如图11c的俯视图所示,可以看到叶片盘449、451、453、455、457、459形成了六边形
463。可以看到外侧旋翼456、458和它们叶片盘457、459的中心在机翼446、447的后掠外部部分446b、447b的前缘稍微靠前。当负载飞行时,外侧旋翼456、458和它们叶片盘457、459的中心可以位于航空载具的纵向质心上或接近航空载具的纵向质心。如图所示,六边形463表示飞行器的外部配置界限,而且这个六边形463表示一种非常紧凑的设计,几乎完全由叶片盘、机翼或飞行器主体占据。这有助于增加盘负载,从而增加飞行器的悬停效率。同样明显的是,如上所述的机翼配置有助于设计的紧凑性。此外,可以看出,每个旋翼在飞行器主体的另一侧上具有相对的旋翼,该相对的旋翼在基本上穿过飞行器质心的线上并且离质心的距离相同或接近相同。这种配置允许在垂直起飞和降落操作期间旋翼发生故障的情况下进行极快的控制补偿,因为与故障马达相对的旋翼几乎可以立即降低功率以帮助保持飞行器的姿态。在一些方面,剩余的四个旋翼随后可以加快旋转以补偿由一个旋翼故障和相对旋翼的功率下降引起的整体升力损失。
[0066]
在一些方面,机翼旋翼组件448、450、452、454、456、458相对于飞行器的恒定高度巡航平面不垂直,而是以一定角度向前倾斜。在一些方面,旋翼在5-20度的范围内向前倾斜。在一些方面,旋翼在5-15度的范围内向前倾斜。在一些方面,旋翼在8-20度的范围内向前倾斜度。在一些方面,旋翼在8-12度的范围内向前倾斜。在一示例性实施例中,旋翼倾斜10度。倾斜角可以定义为旋翼轴线和机翼的平均空气动力学弦线之间的角度。在一些方面,机翼旋翼组件可以以上述倾斜角固定,并且可以不具有任何可铰接的方面。
[0067]
飞行器400具有适于在常规飞行期间提供水平推力的水平推进后部旋翼组件443。后部支撑结构444、445从外侧旋翼组件和翼展支撑件的后部部分向下延伸。这些也用作翼型以提供飞行器偏航轴的稳定性。
[0068]
图12a-12b示出了根据本发明一些实施例的航空载具400的各方面。内侧旋翼组件由翼展支撑件462、463支撑,翼展支撑件462、463可以被视为具有前部部分462a、463a和后部部分462b、463b,尽管翼展支撑件本身可以是连续的支撑件。翼展支撑件462、463连结到机翼446、447。前旋翼组件448可以具有顶盖448a和适于空气动力学阻力最小化的后部部分448b。类似地,外侧旋翼组件456可以具有顶盖456a和后部部分456b,并且后部内侧旋翼组件452可以具有顶盖452a和后部部分452b。后部部分448a、456b、452b的尾部方面在下面进一步讨论。如图12b中的侧视图所示,叶片盘449、457、453相对于飞行器的水平面向前倾斜。
[0069]
在航空载具440中考虑的设计因素包括用于垂直起飞和降落的配置以及该配置带来的控制、用于控制稳定性的机翼空气动力学升力中心的纵向位置、控制所需的叶片的更高尖端速度与保持尖端速度降低以减小阻力的愿望相比以及沿翼展保持相对均匀的升力。这些因素的相互作用不会导致明显的优化。
[0070]
在具有前部内侧旋翼组件和后部内侧旋翼组件和每个机翼上只有单个外侧组件的一些方面中,在向前飞行期间由单个内侧旋翼组件提供的升力可能低于外侧旋翼组件的升力,使得它们的总升力沿机翼提供更均匀的升力分布。
[0071]
在一些方面,机翼旋翼组件具有带有电动马达的旋转螺旋桨。在一些方面,水平推进后部旋翼组件具有电动马达。在一些方面,马达由例如一个电池或多个电池的电源供电。
[0072]
图13a-13c示出了具有顶盖470a和在整流罩下方的延伸的后部部分470b的旋翼组件470。由于旋翼组件将保持例如从垂直方向向前倾斜10度或如上所述的其它值,延伸的后部部分470b有助于压力恢复区域以避免流动分离。在一些方面,延伸的后部部分下整流罩
(undercowling)可以是与空气动力学尾桁的外表面连结的连续空气动力学结构的一部分。在一些方面,延伸的后部部分下整流罩可能与相邻的结构更加不同,如图13b所示。在一典型的实施例中,可以是电动马达的马达位于旋翼组件470内。
[0073]
图14a-14c示出了具有叶片472的旋翼组件470。顶盖470a将与叶片一起旋转,而旋翼组件的延伸的后部部分470b将与飞行器主体保持固定。旋翼组件470的另一方面是旋翼顶盖470a的半径473与叶片盘的半径474的比率。如上所述,具有较大半径的旋翼帽470a将叶片472的内侧端推出,并减少在向前飞行期间向后倾斜的叶片上可能出现失速的情况。在一些方面,旋翼帽的半径与叶片盘的半径之比大于0.25。在一些方面,旋翼帽的半径与叶片盘的半径之比大于0.30。在一些方面,旋翼帽的半径与叶片盘的半径之比大于0.20。
[0074]
图15a-15e示出了具有空气动力学尾桁483的一示例性双旋翼组件480。前部旋翼组件482具有顶盖482a和延伸的后部部分482b。后部旋翼组件481具有顶盖281a和延伸的后部部分481b。后部支撑结构484可以从空气动力学尾桁483的后部区域向下延伸。如图15c中沿空气动力学尾桁进行的切口485的横截面所示,翼型横截面用来在垂直起飞和降落操作期间以及在向前飞行期间减少阻力。
[0075]
在一些实施例中,如图16a-16d中所示,航空载具500利用根据本发明的其它实施例的前倾旋翼。航空载具500具有带有左机翼502和右机翼503的载具主体501。如图16c中的俯视图所示,左机翼502具有内部部分和外部部分。右机翼503具有内部部分和外部部分。机翼502、503可以是部分前掠机翼,其中内部部分前掠而且外部部分向后掠。如图所示的机翼的配置允许机翼的空气动力学中心在航空载具的质心的后面,这可以增强向前飞行中航空载具的控制和稳定性。此外,可能希望在飞行员位置的后面将机翼连结到航空载具的主体。在一些方面,存在将机翼连结到主体并相互连结的内部结构元件,其可以横穿航空载具主体的内部。而且,这些内部结构元件可以位于飞行器主体的顶部,因为机翼可以在飞行器主体的顶部或靠近飞行器主体的顶部在结构上连结到飞行器主体。使用这种较高高度的连结和相关的内部结构支撑件,当飞行员坐在飞行器主体中时,机翼可能需要在飞行员头部后面连结到飞行器主体。前掠的内部部分允许机翼的向后连结以支持上述考虑。然后,外部部分上的机翼掠的改变用于使机翼的整体纵向空气动力学中心向后,以支持控制和稳定性考虑。水平推进螺旋桨516适于与安装在机翼上的旋翼组件的向前推力分量一起在水平飞行中向前推进飞行器,如上面所述的。
[0076]
航空载具500具有连结到右侧机翼503和左侧机翼502的主体501,并且具有多个安装在机翼上的堆叠双旋翼组件。右侧前部上旋翼组件506和右侧前部下旋翼组件507以及右侧后部上旋翼组件504和右侧后部下旋翼组件505安装在连结到右侧机翼503的翼展支撑件上。左侧前部上旋翼组件508和左侧前部下旋翼组件509以及左侧后部上旋翼组件510和左侧下旋翼组件511安装在连接到左侧机翼502的翼展支撑件上。在该配置中,可以看出,每个旋翼在飞行器主体的另一侧上具有相对的旋翼,该相对的旋翼在基本上穿过飞行器质心的线上并且离质心的距离相同或接近相同。这种配置允许在垂直起飞和降落操作期间旋翼发生故障的情况下进行极快的控制补偿,因为与故障马达相对的旋翼几乎可以立即降低功率以帮助保持飞行器的姿态。在一些方面,剩余的四个旋翼随后可以加快旋转以补偿由一个旋翼故障和相对旋翼的功率下降引起的整体升力损失。
[0077]
在一些方面,机翼旋翼组件504、505、506、507、508、509、510、511相对于飞行器的
恒定高度巡航平面不垂直,而是以一定角度向前倾斜。在一些方面,旋翼在5-20度的范围内向前倾斜。在一些方面,旋翼在5-15度的范围内向前倾斜。在一些方面,旋翼在8-20度的范围内向前倾斜度。在一些方面,旋翼在8-12度的范围内向前倾斜。在一示例性实施例中,旋翼倾斜10度。倾斜角可以定义为旋翼轴线和机翼的平均空气动力学弦线之间的角度。在一些方面,机翼旋翼组件可以以上述倾斜角固定,并且可以不具有任何可铰接的方面。
[0078]
如图16b中的侧视图所示,旋翼组件504、505、506,507由具有延伸的后部部分512、513、514、516的旋翼支撑,其有助于压力恢复区域以避免流动分离。
[0079]
在一些实施例中,如图17a-17d中所示,航空载具600利用根据本发明的其它实施例的前倾旋翼。航空载具600具有带有左机翼和右机翼的载具。如图17c中的俯视图所示,左机翼具有内部部分和外部部分。右机翼503具有内部部分和外部部分。机翼可以是部分前掠机翼,其中内部部分前掠而且外部部分向后掠。如图所示的机翼的配置允许机翼的空气动力学中心在航空载具的质心的后面,这可以增强向前飞行中航空载具的控制和稳定性。此外,可能希望在飞行员位置的后面将机翼连结到航空载具的主体。在一些方面,存在将机翼连结到主体并相互连结的内部结构元件,其可以横穿航空载具主体的内部。而且,这些内部结构元件可以位于飞行器主体的顶部,因为机翼可以在飞行器主体的顶部或靠近飞行器主体的顶部在结构上连结到飞行器主体。使用这种较高高度的连结和相关的内部结构支撑件,当飞行员坐在飞行器主体中时,机翼可能需要在飞行员头部后面连结到飞行器主体。前掠的内部部分允许机翼的向后连结以支持上述考虑。然后,外部部分上的机翼掠的改变用于使机翼的整体纵向空气动力学中心向后,以支持控制和稳定性考虑。水平推进螺旋桨516适于与安装在机翼上的旋翼组件的向前推力分量一起在水平飞行中向前推进飞行器,如上面所述的。
[0080]
航空载具600具有连结到右侧机翼和左侧机翼的主体,并且具有多个安装在机翼上的旋翼组件。内侧右侧前部旋翼组件605和内侧右侧后部旋翼组件606安装在连结到右侧机翼的翼展支撑件上。外侧右侧前部旋翼组件607和外侧右侧后部旋翼组件608安装在连结到右侧机翼的翼展支撑件上。内侧左侧前部旋翼组件603和内侧左侧后部旋翼组件604安装在连结到左侧机翼503的翼展支撑件上。左侧外侧旋翼组件601和左侧外侧后部旋翼组件602安装在连结到左侧机翼的翼展支撑件上。左侧外侧旋翼组件601、602的叶片在向前飞行中在固定机翼外侧的区域610中提供升力,这加宽了机翼的有效翼展。右侧外侧旋翼组件607、608的叶片在向前飞行中在固定机翼外侧的区域611中提供升力,这加宽了机翼的有效翼展。
[0081]
在该配置中,可以看出,每个旋翼在飞行器主体的另一侧上具有相对的旋翼,该相对的旋翼在基本上穿过飞行器质心的线上并且离质心的距离相同或接近相同。这种配置允许在垂直起飞和降落操作期间旋翼发生故障的情况下进行极快的控制补偿,因为与故障马达相对的旋翼几乎可以立即降低功率以帮助保持飞行器的姿态。在一些方面,剩余的四个旋翼随后可以加快旋转以补偿由一个旋翼故障和相对旋翼的功率下降引起的整体升力损失。
[0082]
在一些方面,机翼旋翼组件601、602、603、604、605、606、607、608相对于飞行器的恒定高度巡航平面不垂直,而是以一定角度向前倾斜。在一些方面,旋翼在5-20度的范围内向前倾斜。在一些方面,旋翼在5-15度的范围内向前倾斜。在一些方面,旋翼在8-20度的范
围内向前倾斜度。在一些方面,旋翼在8-12度的范围内向前倾斜。在一示例性实施例中,旋翼倾斜10度。倾斜角可以定义为旋翼轴线和机翼的平均空气动力学弦线之间的角度。在一些方面,机翼旋翼组件可以以上述倾斜角固定,并且可以不具有任何可铰接的方面。
[0083]
如图17d的侧视图所示,旋翼组件601、602、603、604、605、606、607、608由具有延伸的后部部分的旋翼支撑,其有助于压力恢复区域以避免流动分离。
[0084]
从以上描述显而易见的是,可以根据本文给出的描述来配置各种各样的实施例,并且本领域技术人员将容易想到另外的优点和修改。因此,本发明在其更广泛的方面不限于所示出和描述的具体细节和说明性示例。因此,可以在不偏离申请人的总体发明的精神或范围的情况下偏离这些细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1