一种采用无人机驱动的新型伐木装置
1.本发明涉及无人机领域,尤其涉及一种用于农林业的采用无人机驱动的新型伐木装置。
背景技术:
2.当前伐木作业所用伐木机为大型伐木机车,机车开进森林,司机在驾驶室内操控机头伐木、除枝、割断,但是存在机器太重,车轮反复压实土壤,导致来年树苗难再生的问题以及伐木机臂处于驾驶室正中央,遮挡司机视线的问题。因此,现有技术需要进一步改进和完善。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供一种采用无人机驱动的新型伐木装置。
4.本发明的目的通过下述技术方案实现:
5.一种采用无人机驱动的新型伐木装置,主要包括装置本体、以及安装在装置本体上的机翼、螺旋桨、滚轮、电锯刀、控制器和电池组。所述机翼位于装置本体顶部的两侧,与装置本体活动连接,实现机翼的展开与收纳。所述螺旋桨安装在机翼上,位于机翼底部并与电池组电连接。所述装置本体上设有环形空腔。所述环形空腔纵向设置在装置本体上,作业时卡设在树干上。所述滚轮设置在环形空腔的两侧,通过电机驱动转动,并通过弹簧向中部夹紧。所述电锯刀水平安装在装置本体的底部位置,其一端与装置本体可转动连接,另一端水平延伸并可绕连接端水平转动。所述控制器和电池组均安装在装置本体内,所述控制器通过电池组分别与电机、电锯刀电连接。
6.进一步的,所述伐木装置还包括用于切断树枝的去枝刀。所述去枝刀分别安装在环形空腔的两侧,其一端与装置本体铰接,另一端可绕铰接端水平转动。
7.作为本发明的优选方案,所述去枝刀的刀刃斜向上设置。
8.进一步的,所述伐木装置还包括伸缩式支撑杆。所述支撑杆安装在装置本体的两侧,位于机翼下方。所述支撑杆的一端与装置本体铰接,另一端与机翼铰接。
9.作为本发明的优选方案,所述支撑杆采用电动杆、气动杆或液压杆。
10.进一步的,所述装置本体的两侧设有第一缺口。所述第一缺口位于环形空腔的两侧位置。
11.作为本发明的优选方案,所述装置本体采用一体机身结构设计。
12.作为本发明的优选方案,所述机翼采用不锈钢材料制成,其上设有第二缺口。所述第二缺口位于螺旋桨上方位置。
13.作为本发明的优选方案,所述电锯刀采用窄长的大功率全铜链条锯。
14.进一步的,所述装置本体还设有用于获取周围环境图像的摄像头。所述摄像头安装在装置本体顶部,并通过控制器向外界发送图像信息。
15.本发明的工作过程和原理是:工作时,用户可通过遥控器对发明装置实施远程控制。控制器接收到指令后,控制支撑杆打开机翼,驱动螺旋桨旋转,使发明装置飞行到指定地点。到达指定位置后,两侧的去枝刀展开,伐木装置前进并使环形空腔卡在树干上,此时滚轮卡设在树干上并可沿树干上下滚动,从而带动整个伐木装置在树干上上下运动。同时,去枝刀向内收拢并环抱树干,在伐木装置上下移动过程中,对树干上的枝条进行割断、去除。最后,电锯刀启动将树干从当前位置切断,切断后的树干由单个或多个伐木装置共同运送到指定位置。本发明还具有结构简单、操作方便、容易实施的优点。
16.与现有技术相比,本发明还具有以下优点:
17.(1)本发明所提供的采用无人机驱动的新型伐木装置采用无人机结合伐木机构的方式进行伐木作业,保护土壤、植被的同时提高了工作效率和工人的安全性。
18.(2)本发明所提供的采用无人机驱动的新型伐木装置采用多个伐木装置进行作业,大大缩短伐木时间,显著提高了工作的效率。
19.(3)本发明所提供的采用无人机驱动的新型伐木装置采用可收缩机翼,机翼形状与机身完全吻合,收缩状态的伐木装置体型较小,为四方体,便于堆放与收纳,可以由一辆小型货车装载超过6台这种伐木装置,显著提高了伐木工作效率。
附图说明
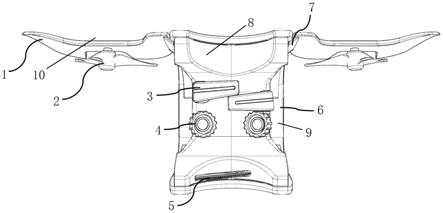
20.图1是本发明所提供的采用无人机驱动的新型伐木装置的主视图。
21.图2是本发明所提供的采用无人机驱动的新型伐木装置的俯视图。
22.图3是本发明所提供的采用无人机驱动的新型伐木装置的主视图(收纳后)。
23.图4是本发明所提供的采用无人机驱动的新型伐木装置的立体图(展开后)。
24.图5是本发明所提供的采用无人机驱动的新型伐木装置的立体图(收纳后)。
25.上述附图中的标号说明:
[0026]1‑
机翼,2
‑
螺旋桨,3
‑
去枝刀,4
‑
滚轮,5
‑
电锯刀,6
‑
装置本体,7
‑
支撑杆,8
‑
环形空腔,9
‑
第一缺口,10
‑
第二缺口。
具体实施方式
[0027]
为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明作进一步说明。
[0028]
实施例1:
[0029]
如图1至图5所示,本实施例公开了一种采用无人机驱动的新型伐木装置,主要包括装置本体6、以及安装在装置本体6上的机翼1、螺旋桨2、滚轮4、电锯刀5、控制器和电池组。所述机翼1位于装置本体6顶部的两侧,与装置本体6活动连接,实现机翼1的展开与收纳。所述螺旋桨2安装在机翼1上,位于机翼1底部并与电池组电连接。所述装置本体6上设有环形空腔8。所述环形空腔8纵向设置在装置本体6上,作业时卡设在树干上。所述滚轮4设置在环形空腔8的两侧,通过电机驱动转动,并通过弹簧向中部夹紧。所述电锯刀5水平安装在装置本体6的底部位置,其一端与装置本体6可转动连接,另一端水平延伸并可绕连接端水平转动。所述控制器和电池组均安装在装置本体6内,所述控制器通过电池组分别与电机、电锯刀5电连接。
[0030]
进一步的,所述伐木装置还包括用于切断树枝的去枝刀3。所述去枝刀3分别安装在环形空腔8的两侧,其一端与装置本体6铰接,另一端可绕铰接端水平转动。
[0031]
作为本发明的优选方案,所述去枝刀3的刀刃斜向上设置。
[0032]
进一步的,所述伐木装置还包括伸缩式支撑杆7。所述支撑杆7安装在装置本体6的两侧,位于机翼1下方。所述支撑杆7的一端与装置本体6铰接,另一端与机翼1铰接。
[0033]
作为本发明的优选方案,所述支撑杆7采用电动杆、气动杆或液压杆。
[0034]
进一步的,所述装置本体6的两侧设有第一缺口9。所述第一缺口9位于环形空腔8的两侧位置。
[0035]
作为本发明的优选方案,所述装置本体6采用一体机身结构设计。
[0036]
作为本发明的优选方案,所述机翼1采用不锈钢材料制成,其上设有第二缺口10。所述第二缺口10位于螺旋桨2上方位置。
[0037]
作为本发明的优选方案,所述电锯刀5采用窄长的大功率全铜链条锯。
[0038]
进一步的,所述装置本体6还设有用于获取周围环境图像的摄像头。所述摄像头安装在装置本体6顶部,并通过控制器向外界发送图像信息。
[0039]
为了进一步描述伐木装置各部件的具体用途,下面对其进行详细说明:
[0040]
机翼1:伐木机的飞行模块,可展开与收回,通过支撑杆7即可实现开合,整体制造由坚硬不锈钢制作,坚固耐磨。机翼1收起后与装置本体6完全契合,使得收起机翼1状态十分完整,以便于装车携带。
[0041]
螺旋桨2:伐木装置的飞行模块的动力部分,采用双螺旋浆。螺旋桨2采用流线型三翼,材料为轻质不锈钢,螺旋桨2与机翼1错开,机翼1的造型留有空气流动的第二缺口10,给螺旋桨2提供向上飞的动力。
[0042]
去枝刀3:又名去枝器。可通过树干的最大直径为50cm,两个去枝刀3向内收紧,环抱树干,当伐木装置以滚轮4的动力顺着树干整体移动时,两个去枝刀3便可去除多余旁枝。去枝刀3是通过内侧刀锋板加外侧同样造型的金属固定刀架组成。去枝刀3可以向内收紧与向外放宽,即夹住树干。
[0043]
滚轮4(锁紧树干和爬行):两个滚轮4弹性锁紧树干,并通过动力使伐木装置沿着树干方向爬行。滚轮4是由电动转动内芯加橡胶材质的外轮组成。表面粗糙能够在树干上摩擦滚动。
[0044]
电锯刀5:电锯刀5可以前后伸出,伐木装置抱住树干后,便可伸出电锯切断树干,并在无人机移动一定距离后定距伸出,切断树干为很多小段,电锯结构与旧有伐木机电锯结构相同。采用窄长的大功率全铜链条锯。
[0045]
支撑杆7:连接机翼1与装置本体6,起到收放机翼1与支撑机翼1的作用。
[0046]
本发明的工作过程和原理是:工作时,用户可通过遥控器对发明装置实施远程控制。控制器接收到指令后,控制支撑杆7打开机翼1,驱动螺旋桨2旋转,使发明装置飞行到指定地点。到达指定位置后,两侧的去枝刀3展开,伐木装置前进并使环形空腔8卡在树干上,此时滚轮4卡设在树干上并可沿树干上下滚动,从而带动整个伐木装置在树干上上下运动。同时,去枝刀3向内收拢并环抱树干,在伐木装置上下移动过程中,对树干上的枝条进行割断、去除。最后,电锯刀5启动将树干从当前位置切断,切断后的树干由单个或多个伐木装置共同运送到指定位置。本发明还具有结构简单、操作方便、容易实施的优点。
[0047]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1