一种基于无人机的工程测量设备的制作方法
1.本发明涉及工程测量技术领域,特别是一种基于无人机的工程测量设备。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用,军用方面,无人机分为侦察机和靶机,民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
4.在建筑施工的过程中会经常需要进行工程测量,以便保证施工的准确性,现有工程测量的设备往往直接放置在地面上,从而无法方便的调节测量设备的角度,进而需要人工进行调节,然而人工调节速度慢,且使得测量起来很不方便,操作繁琐,影响工程测量的进度及效率,同时导致测量精准度较差,为此,需要设计一种基于无人机的工程测量设备。
技术实现要素:
5.本发明的目的是为了解决上述问题,设计了一种基于无人机的工程测量设备。
6.实现上述目的本发明的技术方案为,一种基于无人机的工程测量设备,包括无人机控制机构,所述无人机控制机构的底部设置有工程测量机构,所述无人机控制机构与所述工程测量机构之间设置有连接机构,所述工程测量机构包括设置在无人机控制机构底部的顶端支撑板,所述顶端支撑板底安装面上设置有若干组可转动的支撑机构,所述支撑机构一端设置有辅助固定机构,所述顶端支撑板底安装面的中心位置设置有与支撑机构连接的的控制组件,所述顶端支撑板的底安装面还设置有平整度测量机构、距离测量机构、工程表面缺陷检测机构。
7.作为本技术方案的进一步描述,所述无人机控制机构包括机架,所述机架顶部设置有若干个飞行控制器,所述机架底部设置有若干根底杆,每一所述底杆底端设置有所述连接机构。
8.作为本技术方案的进一步描述,所述支撑机构包括设置在顶端支撑板底安装面上的第一铰链座,所述第一铰链座上通过连接销轴连接有可转动的支撑杆,所述支撑杆远离所述第一铰链座一端设置有辅助固定机构。
9.作为本技术方案的进一步描述,所述辅助固定机构包括设置在所述支撑杆远离所述第一铰链座一端辅助气缸,所述辅助气缸的输出端设置有锥形固定件。
10.作为本技术方案的进一步描述,所述连接机构包括设置在底杆底部的电磁铁组件,所述顶端支撑板顶部设置有支撑块,所述支撑块上设置有连接件,所述连接件与所述电
磁铁组件连接。
11.作为本技术方案的进一步描述,所述控制组件包括设置在顶端支撑板底部中心位置的安装板,所述安装板上设置有动力电机,所述动力电机的输出端通过联轴器连接有传动丝杆,所述传动丝杆远离所述动力电机一端设置有限位板。
12.作为本技术方案的进一步描述,所述传动丝杆上设置有移动螺母,所述移动螺母上设置有第一连接耳,所述支撑杆一侧设置有第二连接耳,所述第一连接耳与所述第二连接耳之间通过连接杆连接,所述连接杆与所述第一连接耳之间转动连接,所述连接杆与所述第二连接耳之间转动连接。
13.作为本技术方案的进一步描述,所述平整度测量机构设置在其中两组支撑机构之间,所述距离测量机构设置在其中两组支撑机构之间,所述工程表面缺陷检测机构设置在其中两组支撑机构之间。
14.作为本技术方案的进一步描述,所述平整度测量机构、所述距离测量机构、所述工程表面缺陷检测机构均采用折叠伸缩组件。
15.作为本技术方案的进一步描述,所述平整度测量机构的输出端设置有平整度检测传感器,所述距离测量机构的输出端设置有距离测量传感器,所述工程表面缺陷检测机构的输出端设置有缺陷视觉检测传感器。
16.其有益效果在于,此基于无人机的工程测量设备,结构简单,实用性较强,稳定性高,在测量过程中可以实现设备的自动调节,避免了使用人工进行调节,运用此基于无人机的工程测量设备,简化了工程测量的步骤,提高了工程测量的进度及效率,同时提高了测量的精准度。
附图说明
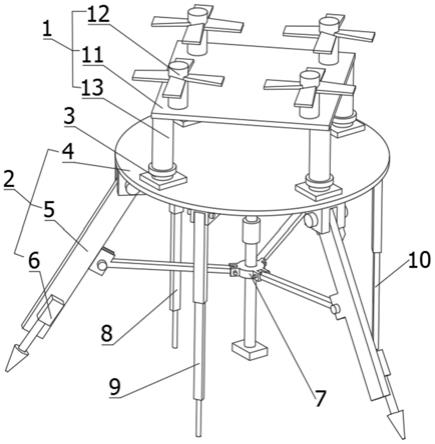
17.图1是本发明的整体结构示意图;
18.图2是本发明的连接机构的结构示意图;
19.图3是本发明另一视角的整体结构示意图。
20.图中,1、无人机控制机构;2、工程测量机构;3、连接机构;4、顶端支撑板;5、支撑机构;6、辅助固定机构;7、控制组件;8、平整度测量机构;9、距离测量机构;10、工程表面缺陷检测机构;11、机架;12、飞行控制器;13、底杆;14、第一铰链座;15、连接销轴;16、支撑杆;17、辅助气缸;18、锥形固定件;19、电磁铁组件;20、支撑块;21、连接件;22、安装板;23、动力电机;24、联轴器;25、传动丝杆;26、限位板;27、移动螺母;28、第一连接耳;29、第二连接耳;30、连接杆。
具体实施方式
21.首先说明本发明的设计初衷,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,在建筑施工的过程中会经常需要进行工程测量,以便保证施工的准确性,现有工程测量的设备往往直接放置在地面上,从而无法方便的调节测量设备的角度,进而需要人工进行调节,然而人工调节速度慢,且使得测量起来很不方便,操作繁琐,影响工程测量的进度及效率,同时导致测量精准度较差,因此,本发明设计了一种基于无人机的工程测量设备。
22.下面结合附图对本发明进行具体描述,如图1
‑
图3所示,一种基于无人机的工程测量设备,包括无人机控制机构1,无人机控制机构1的底部设置有工程测量机构2,通过无人机控制机构1实现对工程测量机构2的控制,无人机控制机构1可以带动工程测量机构2准确到达指定的测量位置进行测量。
23.工程测量机构2用于对工程的测量,下面将详细介绍工程测量机构2的具体结构,工程测量机构2包括设置在无人机控制机构1底部的顶端支撑板4,为了实现对工程测量机构2的支撑,在顶端支撑板4底安装面上设置有若干组可转动的支撑机构5,下面将详细介绍支撑机构5的具体结构,
24.支撑机构5一端设置有辅助固定机构6,所述顶端支撑板4底安装面的中心位置设置有与支撑机构5连接的的控制机构,所述顶端支撑板4的底安装面还设置有平整度测量机构8、距离测量机构9、工程表面缺陷检测机构10。
25.下面将详细介绍支撑机构5的具体结构,支撑机构5包括设置在顶端支撑板4底安装面上的第一铰链座14,在第一铰链座14上通过连接销轴15连接有可转动的支撑杆16,通过支撑杆16实现对顶端支撑板4的支撑。
26.为了加强工程测量过程中的稳定性,支撑机构5一端设置有辅助固定机构6,辅助固定机构6设置在所述支撑杆16远离所述第一铰链座14一端,下面将详细介绍辅助固定机构6的具体结构,辅助固定机构6包括设置在支撑杆16远离所述第一铰链座14一端辅助气缸17,辅助气缸17的输出端设置有锥形固定件18,通过辅助固定气缸带动锥形固定件18运动,从而,有效加强了工程测量过程中的稳定性。
27.为了实现对支撑杆16开阖角度的控制,在顶端支撑板4底安装面的中心位置设置有与支撑机构5连接的的控制组件7,下面将详细介绍控制组件7的具体结构,控制组件7包括设置在顶端支撑板4底部中心位置的安装板22,在安装板22上设置有动力电机23,在动力电机23的输出端通过联轴器24连接有传动丝杆25,传动丝杆25上设置有移动螺母27,所述移动螺母27上设置有第一连接耳28,所述支撑杆16一侧设置有第二连接耳29,所述第一连接耳28与所述第二连接耳29之间通过连接杆30连接,所述连接杆30与所述第一连接耳28之间转动连接,所述连接杆30与所述第二连接耳29之间转动连接,为了实现对移动螺母27位置的限定,在传动丝杆25远离所述动力电机23一端设置有限位板26,通过动力电机23,带动传动丝杆25转动,进而带动移动螺母27升降移动,进而使得移动螺母27带动连接杆30运动,从而控制支撑杆16的开阖角度。
28.下面将详细介绍无人机控制机构1的具体结构,无人机控制机构1包括机架11,在机架11顶部设置有若干个飞行控制器12,机架11底部设置有若干根底杆13,每一底杆13底端设置有所述连接机构3。
29.为了实现无人机控制机构1与工程测量机构2的连接,在无人机控制机构1与所述工程测量机构2之间设置有连接机构3,下面将详细介绍连接机构3的具体结构,连接机构3包括设置在底杆13底部的电磁铁组件19,顶端支撑板4顶部设置有支撑块20,支撑块20上设置有连接件21,所述连接件21与所述电磁铁组件19连接,电磁铁组件19通电,使得电磁铁组件19与连接件21紧密贴合在一起,从而使得无人机控制机构1与工程测量机构2紧密连接在一起,从而使得,无人机控制机构1带动工程测量机构2进行位置的移动。
30.为了实现工程检测,在顶端支撑板4的底安装面还设置有平整度测量机构8、距离
测量机构9、工程表面缺陷检测机构10。
31.下面将详细介绍平整度测量机构8、距离测量机构9、工程表面缺陷检测机构10,平整度测量机构8、距离测量机构9、工程表面缺陷检测机构10均采用折叠伸缩组件。
32.平整度测量机构8设置在其中两组支撑机构5之间,距离测量机构9设置在其中两组支撑机构5之间,工程表面缺陷检测机构10设置在其中两组支撑机构5之间,平整度测量机构8的输出端设置有平整度检测传感器,通过平整度检测传感器实现平整度检测,距离测量机构9的输出端设置有距离测量传感器,通过距离测量传感器实现对距离的测量,工程表面缺陷检测机构10的输出端设置有缺陷视觉检测传感器,通过缺陷视觉检测传感器实现对缺陷的检测。
33.上面详细的说明了本发明的具体结构,下面将说明本发明的工作原理:使用时,通过无人机控制机构1带动工程测量机构2移动至工程测量的位置,电磁铁组件19断电,使得无人机控制机构1与工程测量机构2分开,接着通过控制组件7调节支撑杆16的开阖角度,通过辅助固定机构6加强工程测量机构2的稳定性,固定好后,通过平整度测量机构8、距离测量机构9、工程表面缺陷检测机构10,实现对工程测量过程中的平整度测量、距离测量、工程表面缺陷检测,此基于无人机的工程测量设备,结构简单,实用性较强,稳定性高,在测量过程中可以实现设备的自动调节,避免了使用人工进行调节,运用此基于无人机的工程测量设备,简化了工程测量的步骤,提高了工程测量的进度及效率,同时提高了测量的精准度。
34.上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1