一种基于植保无人机的弥雾喷洒装置及喷洒方法与流程
1.本发明涉及农业喷洒技术领域,尤其是涉及一种基于植保无人机的弥雾喷洒装置及喷洒方法。
背景技术:
2.随着科技的发展与进步,无人机应用于农业喷洒领域,同时弥雾机由于喷洒效果好以及高效性得到人们的广泛认可,但是现有的弥雾机大多数为背负手持喷洒式弥雾机,需要人工手持对农作物喷洒农药,十分浪费时间和喷洒农药的效率较低,费时费力。现有的弥雾机也有采用无人机搭载弥雾机喷洒农药,但是,无人机上还需要安装为弥雾机点火的汽油箱和供弥雾机喷洒的药液桶,大大增大了无人机的载重,导致无人机的航程短,大大降低了工作效率。且不能根据实际作物的情况进行调整,采用直喷的方式进行喷洒,导致喷洒效果差。
技术实现要素:
3.本发明的目的是提供一种基于植保无人机的弥雾喷洒装置及喷洒方法,操作更加简单节能,喷洒效果好,无需人工喷药,省时省力。
4.为实现上述目的,本发明提供了一种基于植保无人机的弥雾喷洒装置,包括无人机、弥雾机构和检测机构;
5.所述检测机构包括支架、通讯主机、高度检测仪以及风速传感器,所述风速传感器固定于所述高度检测仪的顶部,所述风速传感器和所述高度检测仪均与所述通讯主机电连接,所述通讯主机和所述高度检测仪均固定于所述支架上,所述通讯主机与所述无人机相通讯;
6.所述弥雾机构与所述无人机电连接且包括固定架、烟雾剂桶、药桶、角度调节单元以及弥雾机,所述弥雾机的侧面设置有滑块,所述滑块设置于所述药桶箱侧面的弧形滑道内,所述角度调节单元与所述弥雾机相连接,所述角度调节单元、烟雾剂桶以及药桶均固定于所述固定架上,所述固定架与所述无人机的旋转电机固定连接。
7.优选的,所述角度调节单元包括角度调节电机和驱动齿轮,所述驱动齿轮与所述角度调节电机的输出轴固定连接,所述弥雾机的尾部固定有固定齿轮,所述固定齿轮与所述驱动齿轮相啮合,所述角度调节电机与所述无人机电连接。
8.优选的,所述烟雾剂桶和所述药桶内均设置有液位传感器,两个所述液位传感器均与无人机电连接。
9.优选的,所述通讯主机设置有显示屏和麦克风。
10.一种基于植保无人机的弥雾喷洒装置的喷洒方法,
11.步骤s1:通过检测机构检测作物高度和风速参数,确定是否进行喷洒,并将作物高度和实时风速数据传输至无人机中;
12.步骤s2:无人机通过喷洒面积和长度计算最优路径,通过作物高度确定喷洒调节
角度,启动飞行至停机点进行旋转喷洒,同时进行俯仰角度内的往复运动;
13.步骤s3:当电量不足或药物不足或风速过大时,无人机进行返航,同时通过通讯主机播放返航原因。
14.进一步的,在步骤s1中,当风速小于设定风速值时,通讯主机发生驱动信号和高度信号发生至无人机中。
15.进一步的,根据弥雾机射程在作物中设置停机点,若干停机点矩阵分布,两个相邻的停机点间距为其中r为弥雾机射程。
16.进一步的,喷洒调节角度确定公式如下,
17.tanθ1=(h-h)/r,tanθ2=h/r,
18.其中,θ1为喷洒仰角,θ2为喷洒俯角,h为无人机高度,h为无人机高度,r为停机点到作物的距离。
19.因此,本发明采用上述一种基于植保无人机的弥雾喷洒装置及喷洒方法,具有以下有益效果:
20.(1)、具有实时检测机构,当风速过大超过设定值时,及时停止喷洒,避免喷洒浪费。
21.(2)、检测机构具有检测作物高度功能,用于确定喷角度,确保喷洒更加全面,保证喷洒效果。
22.(3)、当无人机需要返航时,及时通知工作人员进行准备工作,提高工作效率。
23.(4)、采用定点旋转喷洒的操作,使得无人机在停机时进行喷洒操作,在保证喷洒效率的同时,大大降低了无人机的能耗。
24.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
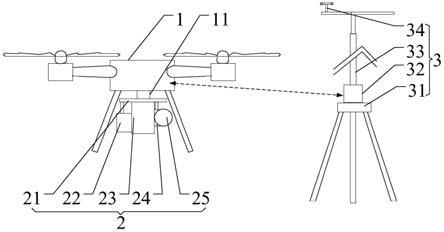
25.图1为本发明一种基于植保无人机的弥雾喷洒装置的结构示意图;
26.图2为本发明角度调节单元结构示意图;
27.图3为药桶侧视图;
28.图4为相邻停机点的距离计算原理图;
29.图5为俯仰角度计算原理图。。
30.附图标记
31.1、无人机;11、旋转电机;2、弥雾机构;21、固定架;22、烟雾剂桶;23、药桶;24、角度调节电机;25、弥雾机;26、驱动齿轮;27、固定齿轮;28、滑块;29、弧形滑道;3、检测机构;31、支架;32、通讯主机;33、高度检测仪;34、风速传感器。
具体实施方式
32.实施例
33.图1为本发明一种基于植保无人机的弥雾喷洒装置的结构示意图,图2为本发明角度调节单元结构示意图,图3为药桶侧视图,如图所示,一种基于植保无人机1的弥雾喷洒装置包括无人机1、弥雾机构2和检测机构3。
34.检测机构3包括支架31、通讯主机32、高度检测仪33以及风速传感器34,风速传感
器34固定于高度检测仪33的顶部,风速传感器34和高度检测仪33均与通讯主机32电连接,用于检测到的风速和作物高度并将数据输送至通讯主机32,通讯主机32和高度检测仪33均固定于支架31上,通讯主机32与无人机1相通讯,及时将风速数据传送至无人机1,当风速过大不宜进行喷洒时,及时自动召回无人机1。通讯主机32设置有显示屏和麦克风,用于显示数据和及时语音提醒工作人员进行相应的准备工作,提高工作效率。
35.弥雾机构2与无人机1电连接且包括固定架21、烟雾剂桶22、药桶23、角度调节单元以及弥雾机25,弥雾机25的侧面设置有滑块28,滑块28设置于药桶23箱侧面的弧形滑道29内,角度调节单元与弥雾机25相连接,角度调节单元包括角度调节电机24和驱动齿轮26,驱动齿轮26与角度调节电机24的输出轴固定连接,弥雾机25的尾部固定有固定齿轮27,固定齿轮27与驱动齿轮26相啮合,角度调节电机24与无人机1电连接。角度调节单元、烟雾剂桶22以及药桶23均固定于固定架21上,烟雾剂桶22和药桶23内均设置有液位传感器,两个液位传感器均与无人机1电连接。固定架21与无人机1的旋转电机11固定连接。
36.一种基于植保无人机1的弥雾喷洒装置的喷洒方法,
37.步骤s1:通过检测机构3检测作物高度和风速参数,风速大于0.3m/s时,不适合进行喷洒工作。当风速小于设定风速值时,通讯主机32发生驱动信号和高度信号发生至无人机1中。当风速大于设定值时,停止进行喷洒工作。实时进行风速检测,避免风速过大影响喷洒效果,造成能源浪费。
38.步骤s2:无人机1通过喷洒面积和长度计算最优路径,根据路径依次停止在相应的停机点,弥雾机25射程一般在20-50m,根据弥雾机25射程在作物中设置停机点,若干停机点矩阵分布,两个相邻的停机点间距为其中r为弥雾机25射程。通过作物高度确定喷洒调节角度,喷洒调节角度确定公式如下,
39.tanθ1=(h-h)/r,tanθ2=h/r,
40.其中,θ1为喷洒仰角,θ2为喷洒俯角,h为无人机1高度,h为无人机1高度,r为停机点到作物的距离,相较直喷,旋转俯仰喷洒,确保喷洒更加全面,保证喷洒效果。
41.无人机1停机后进行旋转喷洒,同时进行俯仰角度内的往复运动。采用定点旋转喷洒的操作,使得无人机1在停机时进行喷洒操作,在保证喷洒效率的同时,大大降低了无人机1的能耗,提高了无人机1的续航能力。
42.步骤s3:当电量不足或药物不足或风速过大时,无人机1进行返航,同时通过通讯主机32播放返航原因。当电量不足时,工作人员及时准备电池进行更换,当药物不足时,及时进行补药,当风速过大时,停止进行喷洒。
43.因此,本发明采用上述一种基于植保无人机1的弥雾喷洒装置及喷洒方法,操作更加简单节能,喷洒效果好,无需人工喷药,省时省力。
44.最后应说明的是:以上实施例仅用以说明本发明的技术方案而非对其进行限制,尽管参照较佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1