一种可引导无人机精准降落的停机坪的制作方法
1.本实用新型涉及无人机技术领域,具体为一种可引导无人机精准降落的停机坪。
背景技术:
2.无人飞行器自问世以来,已有八十多年的历史。近年来,随着多旋翼无人机的出现,无人车和多旋翼无人机协同配合工作的想法被提出,得到了许多人的关注。通过无人车和无人机的协同配合,更容易实现近地面环境(室内、街巷、丛林)执行监视、侦察、运输等任务,具有广阔的军用和民用前景。在多旋翼无人机领域中,当前的无人机通常采用的是四旋翼或者八旋翼多轴模式构型。其有多个旋翼,主要由中心板、力臂、脚架组成,结构简单,云台装置灵活,同时通过旋翼转速差实现了无人机的姿态控制。有时为了方便无人机起降还会给无人机配备停机坪。
3.目前,现有的无人机停机坪不方便进行调平,无法更好的适应复杂的地形环境,适应性较差,而且停机坪不方便不方便移动,实用性不佳,因此还有一定的改进空间,现有的无人机停机坪存在不方便进行调平以及不方便移动的问题。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种可引导无人机精准降落的停机坪,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:包括停机坪主体和降落板,所述降落板的下表面固定连接有连接块,所述连接块的内部球接有万向球,所述万向球的下部固定连接有支撑轴,所述停机坪主体的一侧面转动连接有第二丝杆,所述第二丝杆的外表面螺纹连接有第二滑动块,所述第二滑动块的上表面固定连接有第二滑动杆,所述第二滑动杆的一端抵接有第二升降块,所述第二滑动杆的另一端固定连接有第二连接环,所述第二连接环的上表面抵接有第一连接环,所述第一连接环的两侧均固定连接有第一滑动杆,所述第一滑动杆的一端抵接有第一升降块,所述第一滑动杆的下表面固定连接有第一滑动块,所述第一滑动块的内表面螺纹连接有第一丝杆,所述停机坪主体的下表面固定连接有凸块,所述凸块的内部滑动连接有卡块,所述卡块的一侧固定连接有压缩弹簧,所述停机坪主体的下表面固定连接有固定块,所述固定块的内表面通过转轴转动连接有支撑腿,所述支撑腿的两侧面均开设有与卡块相适配的卡槽。
8.可选的,所述支撑轴的下端与停机坪主体固定连接,所述停机坪主体的内底壁与第二滑动块滑动连接,所述第二滑动杆一侧的形状为斜面型。
9.可选的,所述第二连接环套接于支撑轴的外部,所述停机坪主体的内表面固定连接有第二固定筒,所述第二固定筒套接于第二升降块的外部,所述第二升降块的上端抵接于降落板的下表面。
10.可选的,所述第一连接环套接于支撑轴的外部,所述第一滑动杆远离第一连接环的一侧形状为斜面型,所述第一升降块的上表面抵接于降落板的下表面,所述停机坪主体的内表面固定连接有第一固定筒,所述第一固定筒的内表面与第一升降块滑动连接。
11.可选的,所述停机坪主体的内底壁与第一滑动块滑动连接,所述停机坪主体的正面与第一丝杆转动连接,所述降落板的正面固定安装有第一水平仪,所述降落板的一侧面固定安装有第二水平仪。
12.可选的,所述压缩弹簧远离卡块的一端与凸块固定连接,所述卡块的形状为球型,所述停机坪主体的下表面转动连接有万向轮。
13.有益效果
14.本实用新型提供了一种可引导无人机精准降落的停机坪,具备以下有益效果:
15.1、该可引导无人机精准降落的停机坪,通过设置第二丝杆、第二滑动块、第二滑动杆、第二连接环、第二升降块、万向球和连接块,第二丝杆的转动可通过第二滑动块带动两个第二滑动杆左右滑动,从而推动一侧的第二升降块带动降落板左右转动,通过设置第一丝杆、第一滑动块、第一连接环、第一滑动杆和第一升降块,和以上原理相同,可通过转动第一丝杆来控制降落板前后转动,从而通过控制降落板四个方向的转动对降落板进行调平,以此来提高停机坪的适应性。
16.2、该可引导无人机精准降落的停机坪,通过设置固定块、支撑腿、卡槽、凸块、卡块和压缩弹簧,可通过转动支撑腿使其卡进凸块的内部,压缩弹簧会推动卡块插进卡槽内,从而将四侧的支撑腿折叠收起,方便通过万向轮对该停机坪进行移动,提高该停机坪的实用性。
附图说明
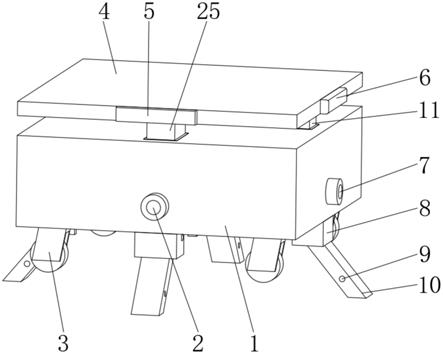
17.图1为本实用新型正视立体结构示意图;
18.图2为本实用新型正视剖视结构示意图;
19.图3为本实用新型侧视剖视立体结构示意图;
20.图4为本实用新型支撑腿折叠状态正视剖视结构示意图。
21.图中:1、停机坪主体;2、第一丝杆;3、万向轮;4、降落板;5、第一水平仪;6、第二水平仪;7、第二丝杆;8、固定块;9、卡槽;10、支撑腿;11、第二升降块;12、第二连接环;13、凸块;14、卡块;15、第二滑动杆;17、第二固定筒;18、支撑轴;19、万向球;20、连接块;21、第一连接环;22、第二滑动块;23、第一滑动块;24、第一固定筒;25、第一升降块;26、第一滑动杆;27、压缩弹簧。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
23.请参阅图1至图4,本实用新型提供一种技术方案:一种可引导无人机精准降落的停机坪,包括停机坪主体1和降落板4,降落板4的下表面固定连接有连接块20,连接块20的内部球接有万向球19,万向球19的下部固定连接有支撑轴18,停机坪主体1的一侧面转动连
接有第二丝杆7,第二丝杆7的外表面螺纹连接有第二滑动块22,第二滑动块22的上表面固定连接有第二滑动杆15,支撑轴18的下端与停机坪主体1固定连接,停机坪主体1的内底壁与第二滑动块22滑动连接,第二滑动杆15一侧的形状为斜面型,第二滑动杆15的一端抵接有第二升降块11,第二滑动杆15的另一端固定连接有第二连接环12,第二连接环12套接于支撑轴18的外部,停机坪主体1的内表面固定连接有第二固定筒17,第二固定筒17套接于第二升降块11的外部,第二升降块11的上端抵接于降落板4的下表面,第二连接环12的上表面抵接有第一连接环21,第一连接环21的两侧均固定连接有第一滑动杆26,第一滑动杆26的一端抵接有第一升降块25,第一滑动杆26的下表面固定连接有第一滑动块23,第一滑动块23的内表面螺纹连接有第一丝杆2,第一连接环21套接于支撑轴18的外部,第一滑动杆26远离第一连接环21的一侧形状为斜面型,第一升降块25的上表面抵接于降落板4的下表面,停机坪主体1的内表面固定连接有第一固定筒24,第一固定筒24的内表面与第一升降块25滑动连接,停机坪主体1的内底壁与第一滑动块23滑动连接,停机坪主体1的正面与第一丝杆2转动连接,降落板4的正面固定安装有第一水平仪5,降落板4的一侧面固定安装有第二水平仪6,停机坪主体1的下表面固定连接有凸块13,凸块13的内部滑动连接有卡块14,卡块14的一侧固定连接有压缩弹簧27,停机坪主体1的下表面固定连接有固定块8,固定块8的内表面通过转轴转动连接有支撑腿10,支撑腿10的两侧面均开设有与卡块14相适配的卡槽9,压缩弹簧27远离卡块14的一端与凸块13固定连接,卡块14的形状为球型,停机坪主体1的下表面转动连接有万向轮3。
24.使用时,通过给停机坪输入相应的程序,可以引导无人机精准降落,此技术为现有技术,再次不多做赘述;调平时,通过拧动第二丝杆7来带动第二滑动块22在停机坪主体1的内底壁滑动,从而带动第二连接环12以及其两侧的第二滑动杆15左右滑动,并通过推动一侧的第二升降块11使其在第二固定筒17的内部向上滑动,进而带动降落板4绕着万向球19向左或向右转动,通过观察第二水平仪6里面的水泡来判断降落板4在左右方向上是否水平,和以上原理相同,可通过拧动第一丝杆2来控制降落板4绕着前后转动,并通过观察第一水平仪5里面的水泡来判断降落板4在前后方向上是否水平,最终实现通过控制降落板4四个方向的转动对降落板4进行调平,以此来提高停机坪的适应性;将该停机坪抬起,并通过转动支撑腿10使其卡进凸块13的内部,压缩弹簧27会推动卡块14插进卡槽9内,从而将四侧的支撑腿10折叠收起,方便通过万向轮3对该停机坪进行移动,提高该停机坪的实用性。
25.综上,本实用新型通过设置第二丝杆7、第二滑动块22、第二滑动杆15、第二连接环12、第二升降块11、万向球19和连接块20,第二丝杆7的转动可通过第二滑动块22带动两个第二滑动杆15左右滑动,从而推动一侧的第二升降块11带动降落板4左右转动,通过设置第一丝杆2、第一滑动块23、第一连接环21、第一滑动杆26和第一升降块25,和以上原理相同,可通过转动第一丝杆2来控制降落板4前后转动,从而通过控制降落板4四个方向的转动对降落板4进行调平,以此来提高停机坪的适应性,通过设置固定块8、支撑腿10、卡槽9、凸块13、卡块14和压缩弹簧27,可通过转动支撑腿10使其卡进凸块13的内部,压缩弹簧27会推动卡块14插进卡槽9内,从而将四侧的支撑腿10折叠收起,方便通过万向轮3对该停机坪进行移动,提高该停机坪的实用性。
26.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用
新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1