一种具有四旋翼的垂直起降无人机的制作方法
1.本发明涉及无人机技术领域,具体涉及一种具有四旋翼的垂直起降无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,近几年来,无人机在防震减灾中发挥着越来越重要的作用。在科技力量助力防震减灾的新时代,工业无人机的应用得到了重视和大规模应用推广,可以有效提升地震预测预警能力,并在震后救灾、灾后重建等工程中提高效率和科技创新能力。
3.现有技术存在以下不足:现有的无人机的续航时间短,没电后每次都需要进行充电,使用时间不久,且驱动电机需要检修或更换时,四旋翼的无人机,由于旋翼的增多,使用太久后,零件之间容易松动,导致整体平衡性不好,且由于四旋翼的是垂直起降,降落时的缓冲性不好,容易因为振动导致零件之间的松动,减少使用寿命。
4.因此,发明一种具有四旋翼的垂直起降无人机很有必要。
技术实现要素:
5.为此,本发明提供一种具有四旋翼的垂直起降无人机,通过设置了四组横杆分别插接在发电机的四周,四组飞行电机和旋翼,飞行电机电性连接发电机,平衡圈内壁均匀套接四组横杆,平衡圈与四组横杆之间为水平状态,降落杆为30度倾斜状,两组降落杆分别设置在发电机的两侧,以解决背景技术中的问题。
6.为了实现上述目的,本发明提供如下技术方案:一种具有四旋翼的垂直起降无人机,包括无人机本体、发电机、飞行装置、燃料箱和底架,无人机本体还包括安装在顶部的发电机,所述发电机一侧开设有安装孔,所述发电机一侧固定连接轴承,所述安装孔内壁插接横杆,所述横杆端部安装有飞行装置,所述横杆外表面套接平衡圈,所述平衡圈外表面套接固定座,所述固定座一侧安装有支撑杆,所述支撑杆固定连接发电机,所述横杆端部安装有飞行电机,所述飞行电机,所述飞行电机输出端固定连接旋翼,所述发电机底部安装有燃料箱,所述燃料箱一侧开设有加油口,所述燃料箱底部安装有摄像头。
7.优选的,所述横杆的数量设置为四组,四组所述横杆分别插接在发电机的四周。
8.优选的,所述飞行电机和旋翼的数量设置为四组,所述飞行电机电性连接发电机。
9.优选的,所述平衡圈内壁均匀套接四组所述横杆,所述平衡圈与四组所述横杆之间为水平状态。
10.优选的,所述轴承内壁安装有转动盘,所述转动盘底端固定连接降落杆。
11.优选的,所述降落杆外表面套接固定板,所述固定板一端安装有拉力弹簧,所述拉力弹簧一端固定连接横梁。
12.优选的,所述降落杆底端安装有底板,所述底板一端固定连接底杆,所述底杆外表面套接滚轮。
13.优选的,所述降落杆为度倾斜状,所述降落杆的数量设置为两组,两组所述降落杆分别设置在发电机的两侧。
14.本发明的有益效果是:
15.1、工作人员通过向燃料箱中添加燃料,随后启动发电机给飞行电机供电,四组飞行电机驱动旋翼开始旋转,使无人机本体垂直向上升起,不使用蓄电池进行充电再放电的方式,使用燃料发电来提高飞行电机续航能力,四旋翼的垂直起降无人机具有一下优点:、垂直起降,续航时间长,垂直起降固定翼无人机结合了固定翼和多旋翼无人机的优势,不需要跑道即可垂直起降,执行飞行任务时切换至固定翼姿态,拥有更长的续航时间,可进行大范围的航测作业;
16.2、垂直起降固定翼无人机因其载重可达2-6kg,摄像头可以为五拼相机、激光雷达、双光吊舱等任务设备,获取高精度影像图或视频资料,为现场救援、灾后重建等工作提供重要的参考数据;
17.3、四组横杆分别插接在发电机的四周,机动灵活,适应复杂的灾害环境,采取模块化设计,可快速拆装,机动性能强、使用方便,在复杂的灾害环境下可迅速投入工作,不间断地跟踪事件的进展,为指挥中心提供及时有效的实时信息;
18.4、平衡圈内壁均匀套接四组横杆,平衡圈与四组横杆之间为水平状态,平衡圈的作用为给四组横杆提供固定和限位作用,提高四组横杆的稳定性和降落时的抗振性,使四组横杆端部的飞行电机和旋翼始终保持水平状态,提高无人机本体的稳定性和使用寿命;
19.5、无人机本体降落时,滚轮率先接触地面,随后无人机本体的惯性是垂直向下的,且两组降落杆为度倾斜状,此时降落杆会在滚轮的滚动下快速向外侧移动,并拉动拉力弹簧,此时拉力弹簧的弹力为降落杆提供缓冲,待拉力弹簧的拉力将无人机本体的惯性抵消后,拉力弹簧回弹,两组降落杆收回,支撑起无人机本体稳稳的降落在地面上。
附图说明
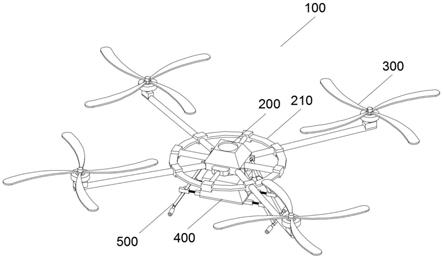
20.图1为本发明提供的无人机本体效果图;
21.图2为本发明提供的无人机本体仰视效果图;
22.图3为本发明提供的飞行装置效果图;
23.图4为本发明提供的发电机和水箱结构示意图;
24.图5为本发明提供的发电机和水箱仰视效果图;
25.图6为本发明提供的底架结构示意图。
26.图中:无人机本体100、发电机200、安装孔201、轴承202、平衡圈210、飞行装置300、支撑杆311、固定座312、横杆313、飞行电机314、旋翼315、燃料箱400、加油口401、摄像头402、底架500、横梁501、拉力弹簧502、固定板503、降落杆504、转动盘505、底板506、底杆507、滚轮508。
具体实施方式
27.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
28.参照附图1-6,本发明提供的一种具有四旋翼的垂直起降无人机,为了实现上述目
的,本发明提供如下技术方案:一种具有四旋翼的垂直起降无人机,包括无人机本体100、发电机200、飞行装置300、燃料箱400和底架500,无人机本体100还包括安装在顶部的发电机200,发电机200一侧开设有安装孔201,发电机200一侧固定连接轴承202,安装孔201内壁插接横杆313,横杆313端部安装有飞行装置300,横杆313外表面套接平衡圈210,平衡圈210外表面套接固定座312,固定座312一侧安装有支撑杆311,支撑杆311固定连接发电机 200,横杆313端部安装有飞行电机314,飞行电机314,飞行电机314输出端固定连接旋翼315,发电机200底部安装有燃料箱400,燃料箱400一侧开设有加油口401,燃料箱400底部安装有摄像头402。
29.进一步地,横杆313的数量设置为四组,四组横杆313分别插接在发电机 200的四周,飞行电机314和旋翼315的数量设置为四组,飞行电机314电性连接发电机200,具体的,当使用无人机本体100时,首先工作人员向燃料箱400 中添加燃料,随后启动发电机200给飞行电机314供电,四组飞行电机314驱动旋翼315开始旋转,使无人机本体100垂直向上升起,不使用蓄电池进行充电再放电的方式,使用燃料发电来提高飞行电机314续航能力,四旋翼的垂直起降无人机具有一下优点:1、垂直起降,续航时间长,垂直起降固定翼无人机结合了固定翼和多旋翼无人机的优势,不需要跑道即可垂直起降,执行飞行任务时切换至固定翼姿态,拥有更长的续航时间,可进行大范围的航测作业;
30.2、燃料箱400底部安装有摄像头402,具体的,垂直起降固定翼无人机因其载重可达2-6kg,摄像头402可以为五拼相机、激光雷达、双光吊舱等任务设备,获取高精度影像图或视频资料,为现场救援、灾后重建等工作提供重要的参考数据;
31.3、四组横杆313分别插接在发电机200的四周,具体的,机动灵活,适应复杂的灾害环境,采取模块化设计,可快速拆装,机动性能强、使用方便,在复杂的灾害环境下可迅速投入工作,不间断地跟踪事件的进展,为指挥中心提供及时有效的实时信息;
32.平衡圈210内壁均匀套接四组横杆313,平衡圈210与四组横杆313之间为水平状态,具体的,平衡圈210的作用为给四组横杆313提供固定和限位作用,提高四组横杆313的稳定性和降落时的抗振性,使四组横杆313端部的飞行电机314和旋翼315始终保持水平状态,提高无人机本体100的稳定性和使用寿命;
33.进一步地,轴承202内壁安装有转动盘505,转动盘505底端固定连接降落杆504,降落杆504外表面套接固定板503,固定板503一端安装有拉力弹簧502,拉力弹簧502一端固定连接横梁501,降落杆504底端安装有底板506,底板506 一端固定连接底杆507,底杆507外表面套接滚轮508,降落杆504为30度倾斜状,降落杆504的数量设置为两组,两组降落杆504分别设置在发电机200 的两侧,具体的,当无人机本体100降落时,滚轮508率先接触地面,随后无人机本体100的惯性是垂直向下的,且两组降落杆504为30度倾斜状,此时降落杆504会在滚轮508的滚动下快速向外侧移动,并拉动拉力弹簧502,此时拉力弹簧502的弹力为降落杆504提供缓冲,待拉力弹簧502的拉力将无人机本体100的惯性抵消后,拉力弹簧502回弹,两组降落杆504收回,支撑起无人机本体100稳稳的降落在地面上。
34.本发明的使用过程如下:当使用无人机本体100时,首先工作人员向燃料箱400中添加燃料,随后启动发电机200给飞行电机314供电,四组飞行电机 314驱动旋翼315开始旋转,使无人机本体100垂直向上升起,不使用蓄电池进行充电再放电的方式,使用燃料发电来提高飞行电机314续航能力,平衡圈210 的作用为给四组横杆313提供固定和限位作用,
提高四组横杆313的稳定性和降落时的抗振性,使四组横杆313端部的飞行电机314和旋翼315始终保持水平状态,提高无人机本体100的稳定性和使用寿命,当无人机本体100降落时,滚轮508率先接触地面,随后无人机本体100的惯性是垂直向下的,且两组降落杆504为30度倾斜状,此时降落杆504会在滚轮508的滚动下快速向外侧移动,并拉动拉力弹簧502,此时拉力弹簧502的弹力为降落杆504提供缓冲,待拉力弹簧502的拉力将无人机本体100的惯性抵消后,拉力弹簧502回弹,两组降落杆504收回,支撑起无人机本体100稳稳的降落在地面上。
35.以上,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1