一种测绘地理信息用无人机勘测装置
1.本发明涉及测量测绘领域,特别涉及一种测绘地理信息用无人机勘测装置。
背景技术:
2.在地理信息的测绘中,空气质量的测量是其中的一项重要参数,后续研究人员会根据空气质量的分析得到相应的对策,从而完成对于一定区域内地理信息的测绘报告。目前,在对一定区域的空气质量测量的时候,都会在区域内的定点位置设定监测站,通过监测站的位置以及检测的数据在区域内进行地图的标记,最后通过一定的经验算法对整个区域内的空气质量进行评估。这样的方式虽然可以得到区域内空气质量,但是由于所采集到实际样本太少,不能足以反映出整个区域的实际空气质量情况。
技术实现要素:
3.本发明的目的是克服上述现有技术中存在的问题,提供一种测绘地理信息用无人机勘测装置,通过在无人机下方设置摄像头并同时搭载定位芯片,在采集空气质量的同时结合该地点定位地点的区域建筑经济情况,综合评判该定位节点在各个时间段的空气质量。
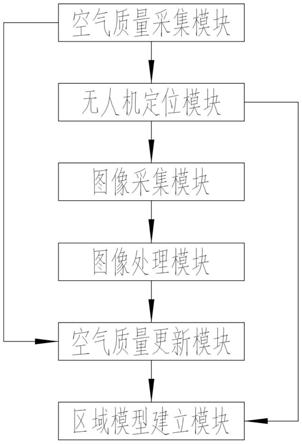
4.为此,本发明提供一种测绘地理信息用无人机勘测装置,包括无人机,所无人机上搭载有空气质量传感器、定位器、摄像器以及中央处理器,所述中央处理器上运行有测控系统,所述测控系统包括:
5.空气质量采集模块,用于实时的接收所述空气质量传感器采集到的空气质量,得到初始空气质量;
6.无人机定位模块,用于实时的接收所述定位器获取的位置坐标;
7.图像采集模块,用于通过所述摄像器实时的拍摄所述无人机下方的图像,得到原始图像;
8.图像处理模块,用于将所述原始图像进行图像线条化处理得到线条图像,并根据所述线条图像中的线条轮廓得到所述线条图像中的各个元素的种类以及每一个元素的数量;
9.空气质量更新模块,将所述线条图像中的各个元素的种类以及每一个元素的数量结合对应时间的所述初始空气质量综合得到最终空气质量;
10.区域模型建立模块,用于接收每一个时间对应的所述位置坐标以及所述最终空气质量,根据所述位置坐标将所述最终空气质量生成空气质量模型并输出。
11.进一步,将所述原始图像进行图像线条化处理得到线条图像的时候,包括如下步骤:
12.获取所述原始图像的各个像素点的像素值,并对比相邻的两个像素点的像素值的差值大小;
13.根据相邻的两个像素点的像素值的差值得到对应的填充颜色值;
14.将相邻的两个像素点对应的填充颜色值填入原始颜色值较大的像素点,完成像素点的像素值的更新;
15.遍历所述原始图像中各个像素点得到所述线条图像。
16.更进一步,所述的相邻的两个像素点的像素值的差值与所述填充颜色值负相关。
17.进一步,所述无人机内置有电子地图,并根据电子地图中设定轨道进行飞行,所述设定轨道为路径函数,所述路径函数的自变量为时间,自变量为所述位置坐标,在对应时间所述路径函数的位置坐标修正所述定位器获取的位置坐标。
18.更进一步,所述路径函数在设定的时候,包括如下步骤:
19.根据所述摄像器可以拍摄的原始图像的区域的大小将待勘测区域进行划分,得到多个勘测子区域;
20.获取所述勘测区域的边缘位置坐标,得到每一个所述勘测子区域的边缘位置坐标;
21.根据每一个所述勘测子区域的边缘位置坐标得到每一个所述勘测子区域的中心坐标;
22.依据s型依次连接相邻的两个所述勘测子区域的中心坐标,遍历所有的所述勘测子区域并结合所述时间,得到所述路径函数。
23.进一步,所述空气质量传感器包括:
24.传感器固定器,通过电动伸缩杆连接在所述无人机的正上方;
25.空气参数传感器,其数量有多个,设置在所述传感器固定器的表面,用于采集空气的各个参数;
26.处理器,用于接收所述空气参数传感器检测到的空气参数,并将所述空气参数进行运算得到所述初始空气质量。
27.进一步,所述空气质量模型为二维平面点集,每一个点根据其对应的所述位置坐标分别,每一个点所显示的颜色为其对应的所述最终空气质量所对应的颜色。
28.本发明提供的一种测绘地理信息用无人机勘测装置,具有如下有益效果:
29.本发明通过在无人机下方设置摄像头并同时搭载定位芯片,在采集空气质量的同时结合该地点定位地点的区域建筑经济情况,综合评判该定位节点在各个时间段的空气质量,并完成周期内的区域空气质量的模型的建立,便于研究人员的观看和研究;
30.本发明的无人机根据电子地图设定的轨迹运行,并将所拍摄的图像转化为地图的形式,并绘制动态地图有助于对空气质量进行分析,同时也结合电子地图的精确坐标,使得空气质量的模型在建立的时候,空气质量与位置坐标一一精确的对应;
31.本发明通过动态的二维平面点集,通过坐标点的颜色表示空气质量的情况,展示动态的区域内的各个坐标点的空气质量变化图,使得研究人员在研究的时候,可以观看的更加直观,减少研究人员的工作量。
附图说明
32.图1为本发明的整体结构示意图;
33.图2为本发明的测控系统的系统连接示意框图;
34.图3为本发明进行线条化处理的流程示意框图;
35.图4为本发明在设定路径函数的流程示意框图。
具体实施方式
36.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
37.在本技术文件中,未经明确的部件型号以及结构,均为本领域技术人员所公知的现有技术,本领域技术人员均可根据实际情况的需要进行设定,在本技术文件的实施例中不做具体的限定。
38.具体的,如图1-4所示,本发明实施例提供了一种测绘地理信息用无人机勘测装置,包括无人机,所无人机上搭载有空气质量传感器、定位器、摄像器以及中央处理器,所述中央处理器上运行有测控系统,所述测控系统包括:空气质量采集模块、无人机定位模块、图像采集模块、图像处理模块、空气质量更新模块以及区域模型建立模块。下面是各个功能模块详细的介绍。
39.空气质量采集模块,用于实时的接收所述空气质量传感器采集到的空气质量,得到初始空气质量;该模块是数据采集的模块,本发明中的空气质量是各种空气参数综合后的表示方式,用于评判空气质量的指标数据。
40.无人机定位模块,用于实时的接收所述定位器获取的位置坐标;该模块是无人机的位置的获取模块,所得到的位置坐标一般使用二维坐标或者三维坐标的方式。
41.图像采集模块,用于通过所述摄像器实时的拍摄所述无人机下方的图像,得到原始图像;该模块是对于图像采集的模块,采集的原始图像即是与无人机采集时候所在的位置坐标相对应。
42.图像处理模块,用于将所述原始图像进行图像线条化处理得到线条图像,并根据所述线条图像中的线条轮廓得到所述线条图像中的各个元素的种类以及每一个元素的数量;该模块是将原始图像处理,提取出其中的地理元素的数量,这样就可以分析得到图像中包含多少种元素,每一种元素分别有多少数量。本发明中的元素一般为建筑,河流,桥梁等地理元素。
43.空气质量更新模块,将所述线条图像中的各个元素的种类以及每一个元素的数量结合对应时间的所述初始空气质量综合得到最终空气质量;该模块是将上述已经得到的初始空气质量和该位置的图像中的各个元素的种类以及每一个元素的数量相结合,对初始空气质量进行最终的评定,得到最终空气质量。本发明是将空中的空气质量与地面的实际情况相结合,综合空间所有的情况,得到最终结果为最终空气质量,这样就可以实现对于该位置的空气质量做出精确准确的评定。
44.区域模型建立模块,用于接收每一个时间对应的所述位置坐标以及所述最终空气质量,根据所述位置坐标将所述最终空气质量生成空气质量模型并输出;该模块是将对应位置得到的空气质量进行中核汇总,得到的各个位置的最终空气质量的动态效果模型,并将动态的效果模型输出,易于研究人员的观察和研究。
45.本发明通过在无人机下方设置摄像头并同时搭载定位芯片,在采集空气质量的同时结合该地点定位地点的区域建筑经济情况,综合评判该定位节点在各个时间段的空气质量,并完成周期内的区域空气质量的模型的建立,便于研究人员的观看和研究。
46.在本发明中,将所述原始图像进行图像线条化处理得到线条图像的时候,包括如下步骤:
47.(一)获取所述原始图像的各个像素点的像素值,并对比相邻的两个像素点的像素值的差值大小;
48.(二)根据相邻的两个像素点的像素值的差值得到对应的填充颜色值;
49.(三)将相邻的两个像素点对应的填充颜色值填入原始颜色值较大的像素点,完成像素点的像素值的更新;
50.(四)遍历所述原始图像中各个像素点得到所述线条图像。
51.上述技术方案中,步骤(一)-(四)按照逻辑顺序依次进行,通过将原始图像进行分析,得到各个像素值与相邻像素值之间的差值,当差值较大的时候,其最有可能为图案的边界,因此,根据相邻的两个像素点的像素值的差值得到对应的填充颜色值,这样的方式遍历所有额的像素点,就可以得到一个类似于素描的线条图,即是本发明所述的初步地图图像,从而通过图像处理的方式将原始图像处理得到初步地图图像,以便后续的操作。
52.同时,在本发明中,所述的相邻的两个像素点的像素值的差值与所述填充颜色值负相关。即是使用黑色表示轮廓的深浅,所得到的结果与素描图更加的类似。
53.在本发明中,所述无人机内置有电子地图,并根据电子地图中设定轨道进行飞行,所述设定轨道为路径函数,所述路径函数的自变量为时间,自变量为所述位置坐标,在对应时间所述路径函数的位置坐标修正所述定位器获取的位置坐标。
54.本发明的无人机根据电子地图设定的轨迹运行,并将所拍摄的图像转化为地图的形式,并绘制动态地图有助于对空气质量进行分析,同时也结合电子地图的精确坐标,使得空气质量的模型在建立的时候,空气质量与位置坐标一一精确的对应。
55.同时,在本发明中,所述路径函数在设定的时候,包括如下步骤:
56.(1)根据所述摄像器可以拍摄的原始图像的区域的大小将待勘测区域进行划分,得到多个勘测子区域;
57.(2)获取所述勘测区域的边缘位置坐标,得到每一个所述勘测子区域的边缘位置坐标;
58.(3)根据每一个所述勘测子区域的边缘位置坐标得到每一个所述勘测子区域的中心坐标;
59.(4)依据s型依次连接相邻的两个所述勘测子区域的中心坐标,遍历所有的所述勘测子区域并结合所述时间,得到所述路径函数。
60.上述技术方案中,步骤(1)-(4)按照逻辑顺序依次进行,通过图像分割的方式得到多个勘测子区域,通过获取每一个勘测子区域的位置坐标,这样勘测子区域所对应的位置坐标就可以表示勘测子区域的位置,在进行区域设定的时候,将勘测子区域对应的位置进行路径函数的规划,无人机根据路径函数,依次进行过对应的勘测子区域,这样就可以得到遍历每一个勘测子区域,从而完成对于原始图像的图像采集,也使得原始图像采集的时候,可以采集到更加细节的清晰图像。
61.在本发明中,采用多融合效果的空气质量传感器,所述空气质量传感器包括:传感器固定器、空气参数传感器以及处理器。其中,传感器固定器通过电动伸缩杆连接在所述无人机的正上方;空气参数传感器的数量有多个,设置在所述传感器固定器的表面,用于采集
空气的各个参数;处理器,用于接收所述空气参数传感器检测到的空气参数,并将所述空气参数进行运算得到所述初始空气质量。
62.本发明中,多个空气参数传感器的种类不同,有氧气传感器、二氧化碳传感器、湿度传感器、温度传感器等多个种类的传感器。同时,在本发明中,电动推杆始终处于工作状态,这样可以检测到的空气的参数受无人机产生的影像小,不会产生大量的空气参数的误差,从而得到更加准确的空气质量。在对空气参数运算得到初始空气质量的时候,根据各个地区给出的空气质量的计算标准进行计算。
63.在本发明中,所述空气质量模型为二维平面点集,每一个点根据其对应的所述位置坐标分别,每一个点所显示的颜色为其对应的所述最终空气质量所对应的颜色。
64.本发明通过动态的二维平面点集,通过坐标点的颜色表示空气质量的情况,展示动态的区域内的各个坐标点的空气质量变化图,使得研究人员在研究的时候,可以观看的更加直观,减少研究人员的工作量。
65.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1