一种自转旋翼无人机地面检测系统的制作方法
1.本发明涉及无人机地面检测,具体涉及一种自转旋翼无人机地面检测系统。
背景技术:
2.自转旋翼无人机是一种以自转旋翼作为升力面,螺旋桨推力为前进动力的旋翼类无人飞行器。无人飞行器的飞行安全与整机系统的可靠性密切相关,因此,需要设计配套的地面检测系统,用于进行充分的系统联试和飞行检查,及时排查系统故障,降低飞行实验中的安全隐患,提高飞行实验成功率。
3.然而,现有的无人机地面检测系统不能对执行机构进行有效检测,并且无法对预设任务航线进行有效验证存储,导致无人机整机飞行的可靠性较差,从而给无人机的飞行带来巨大安全隐患。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术所存在的上述缺点,本发明提供了一种自转旋翼无人机地面检测系统,能够有效克服现有技术所存在的不能对执行机构进行有效检测、无法对预设任务航线进行有效验证存储的缺陷。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:
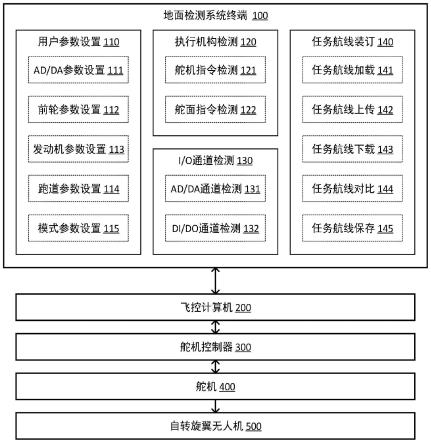
8.一种自转旋翼无人机地面检测系统,包括地面检测系统终端,与地面检测系统终端交互通讯的飞控计算机,与飞控计算机信息交互的舵机控制器,以及与舵机控制器信息交互,并驱动自转旋翼无人机舵面的舵机,所述地面检测系统终端包括i/o通道检测、用户参数设置、执行机构检测和任务航线装订;
9.所述i/o通道检测包括用于检查模拟量输入通道、输出通道状态是否正常的ad/da通道检测,所述用户参数设置包括用于批量设置模拟量输入信号、输出信号的比例值和偏移值的ad/da参数设置,所述执行机构检测包括用于检查单个舵机的工作状态,排查舵机异常的舵机指令检测,以及用于检查各个舵面的响应状态,排查舵面机械故障的舵面指令检测。
10.优选地,所述ad/da通道检测包括用于检查模拟量输入通道状态是否正常的ad通道检测模块,以及用于检查模拟量输出通道状态是否正常的da通道检测模块;
11.所述ad通道检测模块的工作过程,包括:
12.s1、确保飞控计算机已通电;
13.s2、终端计算机操作信号发生器向ad_n通道输入正弦波信号,若界面显示ad_n通道测得的输入信号与信号发生器的输出信号一致,则可判定ad_n通道工作正常;
14.s3、重复s2,直至所有模拟量输入通道检测完毕;
15.所述da通道检测模块的工作过程,包括:
16.s1、确保飞控计算机已通电;
17.s2、终端计算机发送“da通道检测指令”,若电压表测得da_n通道的输出电压值与da通道检测指令值一致,则可判定da_n通道工作正常;
18.s3、重复s2,直至所有模拟量输出通道检测完毕。
19.优选地,所述ad/da参数设置包括用于批量设置模拟量输入信号的比例值和偏移值的ad参数设置模块,以及用于批量设置模拟量输出信号的比例值和偏移值的da参数设置模块。
20.优选地,所述舵机指令检测的工作过程,包括:
21.s1、确保待检测的舵机处于空载状态;
22.s2、确保待检测的舵机所占用的ad_n通道、da_n通道,均已设置了正确的比例值和偏移值;
23.s3、确保舵机与舵机控制器,舵机控制器与飞控计算机均正确连接;
24.s4、飞控计算机、舵机控制器、舵机供电;
25.s5、终端计算机发送“舵机角度指令”,并观测舵机角度反馈,当反馈值与指令值之间的绝对误差不大于设定阈值时,则可判定舵机工作状态正常,否则判定为工作状态异常;
26.s6、重复s5,直至所有舵机检测完毕。
27.优选地,所述舵面指令检测的工作过程,包括:
28.s1、确保舵机与舵面正确连接;
29.s2、确保舵机电气限幅、舵面机械限幅与舵面软件限幅之间无冲突;
30.s3、确保舵机与舵机控制器,舵机控制器与飞控计算机均正确连接;
31.s4、飞控计算机、舵机控制器、舵机供电;
32.s5、终端计算机发送“舵面角度指令”,并观测舵面角度反馈,当反馈值与指令值之间的绝对误差不大于设定阈值时,则可判定舵面工作状态正常,否则判定为工作状态异常;
33.s6、重复s5,直至所有舵面检测完毕。
34.优选地,所述i/o通道检测还包括用于检查离散量输入通道、输出通道状态是否正常的di/do通道检测,所述di/do通道检测包括用于检查离散量输入通道状态是否正常的di通道检测模块,以及用于检查离散量输出通道状态是否正常的do通道检测模块;
35.所述di通道检测模块的工作过程,包括:
36.s1、确保飞控计算机已通电;
37.s2、终端计算机连接di_n通道与信号发生器的输出通道,并操作信号发生器向di_n通道输入周期性方波信号,若界面显示di_n通道的输入信号曲线与信号发生器显示的方波一致,则可判定di_n通道工作正常;
38.s3、重复s2,直至所有离散量输入通道检测完毕;
39.所述do通道检测模块的工作过程,包括:
40.s1、确保飞控计算机已通电;
41.s2、终端计算机发送“do通道检测指令”,若示波器显示的波形与“do通道检测指令”相对应,则可判定do_n通道工作正常;
42.s3、重复s2,直至所有离散量输出通道检测完毕。
43.优选地,所述用户参数设置还包括前轮参数设置、发动机参数设置、跑道参数设置
和模式参数设置;
44.前轮参数设置,用于设置前轮纠偏控制系数和前轮初始偏度;
45.发动机参数设置,用于设置停车、怠速、慢车、巡航、额定、大车状态下对应的油门开度;
46.跑道参数设置,用于设置跑道的中心点坐标、跑道航向、跑道高度、跑道宽度;
47.模式参数设置,用于设置滑行/飞行标志位和滑行速度上限。
48.优选地,所述任务航线装订包括任务航线加载、任务航线上传、任务航线下载、任务航线对比和任务航线保存;
49.任务航线加载,用于读取并显示本地预设任务航线;
50.任务航线上传,用于将本地数据加载区中的本地预设任务航线发送至机载飞控计算机;
51.任务航线下载,用于从飞控计算机中下载机载预设任务航线至下载数据加载区;
52.任务航线对比,在下载机载预设任务航线后自动运行,用于检查上传的本地预设任务航线与下载的机载预设任务航线的一致性,并突出显示不一致的数据;
53.任务航线保存,用于保存从飞控计算机中下载的机载预设任务航线。
54.优选地,所述任务航线上传的工作过程,包括:
55.s1、判断任务航线加载是否已读取本地预设任务航线,若本地数据加载区为空,则退出上传;
56.s2、若本地数据加载区不为空,则向飞控计算机依次发送“地面检测开”指令帧、“数据装订开”指令帧,然后接收并解析飞控计算机返回的指令回报帧,判断飞控计算机当前是否已进入数据装订模式;
57.s3、若飞控计算机已进入数据装订模式,则开始向飞控计算机上传本地预设任务航线;
58.s4、本地预设任务航线上传完毕后,向飞控计算机依次发送“保存装订数据”指令帧、“数据装订关”指令帧,使飞控计算机将接收到的本地预设任务航线存储至flash中,避免断电丢失数据。
59.优选地,所述任务航线下载的工作过程,包括:
60.s1、向飞控计算机依次发送“地面检测开”指令帧、“数据查询开”指令帧,然后接收并解析飞控计算机返回的指令回报帧,判断飞控计算机当前是否已进入数据查询模式;
61.s2、若飞控计算机已进入数据查询模式,则向飞控计算机发送机载预设任务航线下载请求,下载飞控计算机的flash中存储的机载预设任务航线;
62.s3、机载预设任务航线下载完毕后,向飞控计算机发送“数据查询关”指令帧,使飞控计算机退出数据查询模式。
63.(三)有益效果
64.与现有技术相比,本发明所提供的一种自转旋翼无人机地面检测系统,利用ad/da通道检测能够对模拟量输入通道、输出通道状态是否正常进行有效检测,通过ad/da参数设置能够批量设置模拟量输入信号、输出信号的比例值和偏移值,利用执行机构检测可以对各个舵机、舵面的工作状态及响应状态进行有效检测,通过任务航线装订可以对预设任务航线进行有效验证存储,从而大大提升了无人机整机飞行的可靠性,确保了无人机飞行的
→“
da通道检测”功能页面,如需检测da_n通道,则发送“da_n_x”指令(x的取值范围为[-5,5]),此时,若电压表测得da_n通道的输出电压值与da通道检测指令值一致,则可判定da_n通道工作正常;
[0083]
s3、重复s2,直至所有模拟量输出通道检测完毕。
[0084]
da通道检测的目的是为了确认所有da通道是否可以输出正确的模拟电压,只有da通道工作状态正常且da通道参数设置正确时,飞控计算机200才能正常驱动与da通道相关的外部设备,如前轮舵机、方向舵机和桨盘舵机等。
[0085]
如图1和图3所示,i/o通道检测130还包括用于检查离散量输入通道、输出通道状态是否正常的di/do通道检测132。di/do通道检测132包括用于检查离散量输入通道(用于捕获具有开关量特性的信号输入)状态是否正常的di通道检测模块,以及用于检查离散量输出通道(用于输出具有开关量特性的电压信号)状态是否正常的do通道检测模块。
[0086]
其中,di通道检测模块的工作过程,包括:
[0087]
s1、确保飞控计算机200已通电;
[0088]
s2、在终端计算机上运行“地面检测软件”,开启地检模式,进入“di/do通道检测
”→“
di通道检测”功能页面,如需检测di_n通道,则连接di_n通道与信号发生器的输出通道,并操作信号发生器向di_n通道输入周期性方波信号,若界面显示di_n通道的输入信号曲线与信号发生器显示的方波一致,则可判定di_n通道工作正常;
[0089]
s3、重复s2,直至所有离散量输入通道检测完毕。
[0090]
其中,do通道检测模块的工作过程,包括:
[0091]
s1、确保飞控计算机200已通电;
[0092]
s2、在终端计算机上运行“地面检测软件”,开启地检模式,进入“di/do通道检测
”→“
do通道检测”功能页面,如需检测do_n通道,则可借助示波器观察do_n通道的输出信号:发送“do_n_on”指令,示波器显示的波形应为高电平状态;发送“do_n_off”指令,示波器显示的波形应为低电平状态;
[0093]
s3、重复s2,直至所有离散量输出通道检测完毕。
[0094]
如图1所示,用户参数设置110包括用于批量设置模拟量输入信号、输出信号的比例值和偏移值的ad/da参数设置111。ad/da参数设置111包括用于批量设置模拟量输入信号的比例值和偏移值的ad参数设置模块,以及用于批量设置模拟量输出信号的比例值和偏移值的da参数设置模块。
[0095]
ad参数设置是针对模拟量输入通道的,用于批量设置模拟量输入信号的比例值和偏移值。例如,模拟量输入通道ad_1接收垂直陀螺俯仰角输出(模拟电压信号),垂直陀螺俯仰角与模拟电压的转换比例为5.2,零位偏移为0.5,那么ad_1通道的比例值应设为5.2,偏移值应设为0.5。当垂直陀螺俯仰角输出通道输出电压为x伏时,飞控计算机200获得的垂直陀螺俯仰角为5.2*x-0.5度。
[0096]
da参数设置是针对模拟量输出通道的,用于批量设置模拟量输出信号的比例值和偏移值。例如,模拟量输出通道da_2输出方向舵机控制信号(模拟电压信号),舵机使用手册中定义舵轴转角与控制信号的转换比例为5.0,零位偏移为0.5,那么da_2通道的比例值应设为5.0,偏移值应设为0.5。若需控制方向舵机转至y度,da_2通道需输出的模拟电压为(y-0.5)/5.0伏。
[0097]
如图1所示,用户参数设置110还包括前轮参数设置112、发动机参数设置113、跑道参数设置114和模式参数设置115。
[0098]
前轮参数设置112,用于设置前轮纠偏控制系数和前轮初始偏度;
[0099]
发动机参数设置113,用于设置停车、怠速、慢车、巡航、额定、大车状态下对应的油门开度;
[0100]
跑道参数设置114,用于设置跑道的中心点坐标、跑道航向、跑道高度、跑道宽度;
[0101]
模式参数设置115,用于设置滑行/飞行标志位和滑行速度上限。当滑行/飞行标志位设为0时,启用飞行模式,起飞指令有效;当滑行/飞行标志位设为1时,启用滑行模式;当滑行速度超过滑行速度上限时,会触发滑行速度保护程序,将发动机油门自动收至怠速状态。
[0102]
如图1和图4所示,执行机构检测120包括用于检查单个舵机的工作状态,排查舵机异常的舵机指令检测121,以及用于检查各个舵面的响应状态,排查舵面机械故障的舵面指令检测122。
[0103]
其中,舵机指令检测121的工作过程,包括:
[0104]
s1、确保待检测的舵机400处于空载状态;
[0105]
s2、确保待检测的舵机400所占用的ad_n通道、da_n通道,均已设置了正确的比例值和偏移值;
[0106]
s3、确保舵机400与舵机控制器300,舵机控制器300与飞控计算机200均正确连接;
[0107]
s4、飞控计算机200、舵机控制器300、舵机400供电;
[0108]
s5、在终端计算机上运行“地面检测软件”,开启地检模式,进入“执行机构检测
”→“
舵机指令检测”功能页面,若检测的是方向舵机,则发送“方向舵机角度指令”,并观测方向舵机角度反馈,当反馈值与指令值之间的绝对误差不大于0.5时,则可判定舵机工作状态正常,否则判定为工作状态异常;
[0109]
s6、重复s5,直至所有舵机400检测完毕。
[0110]
由于舵机角度指令是数字量,而飞控计算机200发送给舵机控制器300的驱动信号为模拟电压信号,因此舵机角度指令转舵机驱动信号的过程为da转换过程。同理,由于舵机控制器300发送给飞控计算机200的舵机角度反馈为模拟电压信号,因此飞控计算机200获得舵机角度反馈值的过程为ad转换过程。
[0111]
其中,舵面指令检测122的工作过程,包括:
[0112]
s1、确保舵机400与舵面正确连接;
[0113]
s2、确保舵机400电气限幅、舵面机械限幅与舵面软件限幅之间无冲突;
[0114]
s3、确保舵机400与舵机控制器300,舵机控制器300与飞控计算机200均正确连接;
[0115]
s4、飞控计算机200、舵机控制器300、舵机400供电;
[0116]
s5、在终端计算机上运行“地面检测软件”,开启地检模式,进入“执行机构检测
”→“
舵面指令检测”功能页面,若检测的舵面是旋翼桨盘,则发送“桨盘俯仰(或滚转)角度指令”,并观测桨盘俯仰(或滚转)角度反馈,当反馈值与指令值之间的绝对误差不大于0.5时,则可判定舵面工作状态正常,否则判定为工作状态异常;
[0117]
s6、重复s5,直至所有舵面检测完毕。
[0118]
如图4所示,由于舵面是由舵机400驱动的,因此在进行舵面指令检测前,应先完成
舵机指令检测。
[0119]
由上述内容不难看出,初次装机联试,在进行执行机构检测时,正确的操作顺序为:ad/da通道检测;ad/da参数设置;舵机指令检测;舵面指令检测。
[0120]
如图1和图5所示,任务航线装订140包括任务航线加载141、任务航线上传142、任务航线下载143、任务航线对比144和任务航线保存145。
[0121]
任务航线加载141,用于读取并显示本地预设任务航线;
[0122]
任务航线上传142,用于将本地数据加载区中的本地预设任务航线发送至机载飞控计算机200;
[0123]
任务航线下载143,用于从飞控计算机200中下载机载预设任务航线至下载数据加载区;
[0124]
任务航线对比144,在下载机载预设任务航线后自动运行,用于检查上传的本地预设任务航线与下载的机载预设任务航线的一致性,并突出显示不一致的数据;
[0125]
任务航线保存145,用于保存从飞控计算机200中下载的机载预设任务航线。
[0126]
本地预设任务航线由航向规划器生成,并以.txt文件的形式保存在本地存储器的特定位置。自转旋翼无人机飞行前,需通过地面检测系统将本地预设任务航线上传至飞控计算机200。在上传本地预设任务航线之前,应先通过任务航线加载141读取并显示本地预设任务航线。
[0127]
任务航线加载141的工作过程,包括:
[0128]
s1、进入本地预设任务航线文件的保存路径;
[0129]
s2、读取被用户选定的本地预设任务航线文件;
[0130]
s3、将读取的本地预设任务航线以数字列表的形式显示;
[0131]
s4、将读取的本地预设任务航线以2d曲线的形式显示在电子地图上。
[0132]
任务航线上传142的工作过程,包括:
[0133]
s1、判断任务航线加载141是否已读取本地预设任务航线,若本地数据加载区为空,则退出上传;
[0134]
s2、若本地数据加载区不为空,则向飞控计算机200依次发送“地面检测开”指令帧、“数据装订开”指令帧,然后接收并解析飞控计算机200返回的指令回报帧,判断飞控计算机200当前是否已进入数据装订模式;
[0135]
s3、若飞控计算机200已进入数据装订模式,则开始向飞控计算机200上传本地预设任务航线;
[0136]
s4、本地预设任务航线上传完毕后,向飞控计算机200依次发送“保存装订数据”指令帧、“数据装订关”指令帧,使飞控计算机200将接收到的本地预设任务航线存储至flash中,避免断电丢失数据。
[0137]
任务航线下载143的工作过程,包括:
[0138]
s1、向飞控计算机200依次发送“地面检测开”指令帧、“数据查询开”指令帧,然后接收并解析飞控计算机200返回的指令回报帧,判断飞控计算机200当前是否已进入数据查询模式;
[0139]
s2、若飞控计算机200已进入数据查询模式,则向飞控计算机200发送机载预设任务航线下载请求,下载飞控计算机200的flash中存储的机载预设任务航线;
[0140]
s3、机载预设任务航线下载完毕后,向飞控计算机200发送“数据查询关”指令帧,使飞控计算机200退出数据查询模式。
[0141]
任务航线对比144的工作过程,包括:
[0142]
s1、判断任务航线加载141是否已读取本地预设任务航线,若本地数据加载区为空,则退出对比;
[0143]
s2、若本地数据加载区不为空,则逐一对比任务航线加载141数据加载区的数据项和任务航线下载143数据加载区的数据项,当出现不一致数据时,则将任务航线下载143对应的数据项以红色加粗字体突出显示;
[0144]
s3、数据对比结束后,自动退出。
[0145]
任务航线保存145的工作过程,包括:
[0146]
s1、判断任务航线下载143是否已下载机载预设任务航线,若下载数据加载区为空,则退出保存;
[0147]
s2、若已下载机载预设任务航线,则将下载数据加载区的数据以特定的格式保存为yyyy-mm-ddhh-mm-ss_downloadmissions.txt文件。
[0148]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1