一种尾座式载人飞行器
1.本发明涉及飞行器技术领域,更具体的说是涉及一种尾座式载人飞行器。
背景技术:
2.固定翼飞行器在起降时需要较长的跑道,直升机可以实现垂直起降,但难以适应高速、长航程、高效率、低油耗、低噪声的飞行需要。为了适应有限的场地要求,减少对起降空间的需要,同时兼顾固定翼的优点,垂直起降/短距起降固定翼飞行器得到人们的关注,随着模块化、商业化飞行器部件的发展,垂直起降固定翼飞行器蓬勃发展。
3.目前固定翼飞行器实现垂直起降主要包括以下几种方式:喷气发动机推力转向、升力风扇、旋翼固定翼结合、倾转旋翼和尾座式。其中,喷气发动机推力转向飞机的代表就是“鹞”式战斗机,将喷出气流转向实现垂直方向的升力,该方式需要飞行器采用喷气式发动机。升力风扇则通常是利用机身中部或其它部位的涵道风扇提供向下的推力,实现垂直起降。旋翼固定翼结合常见于目前的小型垂直起降固定翼无人机上,该构型多为多轴旋翼和固定翼的结合,在起降时,飞行控制主要靠多轴旋翼实现,平飞时多轴旋翼停止,平飞时,固定的涵道风扇和旋翼无法提供动力,一定程度上降低了飞行器的效率。倾转旋翼的代表作就是v-22“鱼鹰”倾转旋翼机,该飞机的翼尖处布置了可旋转的旋翼,在直升机状态下,其旋翼轴竖直,此时v-22可以进行垂直起降;在固定翼状态下,v-22旋翼轴水平,与机身轴平行,旋翼作为螺旋桨为平飞提供拉力,这样v-22可以兼顾直升机的垂直起降能力和固定翼的高速、远程、低油耗,但该倾转机构重量大,研制难度大、气动特性复杂,给可靠性和维修成本带来巨大压力。
4.尾座式飞行器是在起降时飞行器整体机身轴线竖直,平飞时水平,不需要可动机构实现倾转、结构简单,可在一定程度上兼顾垂直起降、重量和效率的需求,但如果作为小型的载客飞机,由于目前尾座式飞行器中的驾驶舱相对机身是固定的,且驾驶舱内的操控系统是固设在驾驶舱内,同时座椅也是分别相对机身和驾驶舱固定不动的,则尾座式飞行器在平飞阶段-起降阶段的转换过程中,导致驾驶员需随着尾座式飞行器机身水平-垂直状态的变换而产生正-倒的变换,则会给驾驶员带来不适,则会带来驾驶不安全的问题。
5.而且,目前尾座式飞行器的驾驶舱中除了安装有操控系统外,只具有驾驶员用的驾驶座位,但没有安装用于载客用的载客座位,则导致目前的尾座式飞行器不能载客,且由于目前尾座式飞行器中的驾驶舱是相对机身固定不动的,因此,如果将目前的尾座式飞行器的驾驶舱中安装用于载客用的座位,则由于尾座式飞行器在平飞阶段起降阶段的转换过程中,会使乘客需随着尾座式飞行器机身水平竖直状态的变换而产生正(头朝上脚朝下)倒(头朝下脚朝上)的变换,则会给乘客带来不适的体验。
6.同时,目前的尾座式飞行器还存在其他诸多问题,如:将涵道装置通过倾转装置连接在机身上(目前,一般是在机身的左右两侧一一对应连接左倾转装置和右倾转装置,则在左倾转装置和右倾转装置上均连接涵道装置),从而实现涵道装置可变矢量控制,以能更好地调节机身的姿态,但这样会使得尾座式飞行器的结构不紧凑、体积较大;又如:目前的舱
门打开后便处于闲置状态,需要另外将登机扶梯架设在舱口,以使驾驶员和乘客可以登机和走下至地面,则使空间利用率较低。
7.因此,如何提供一种提高驾驶员和乘客舒适性的尾座式载人飞行器是本领域技术人员亟需解决的问题。
技术实现要素:
8.有鉴于此,本发明提供了一种尾座式载人飞行器,不仅可以载客,而且不管在平飞阶段,还是在竖直起降阶段,还是在平飞阶段起降阶段的转换过程中,均可以使驾驶员和乘客保持正(头朝上脚朝下)的状态,从而可以提高驾驶员和乘客的安全性,且提高驾驶的安全性。
9.为了实现上述目的,本发明采用如下技术方案:
10.一种尾座式载人飞行器,包括:
11.飞行器本体,所述飞行器本体的中轴线沿x轴的方向延伸,且所述飞行器本体内开设有安装腔,同时所述飞行器本体背部对应所述安装腔的位置安装有透明窗,所述飞行器本体腹部对应所述安装腔的位置开设有接通所述安装腔的出入口;
12.驾驶载客舱,所述驾驶载客舱连接在所述安装腔内,且所述驾驶载客舱可绕沿y轴方向延伸的轴线l圆周运动,同时所述驾驶载客舱内分别固接有驾驶座位和载客座位,且所述驾驶载客舱内对应所述驾驶座位的位置安装有操控系统,并且所述驾驶载客舱分别对应所述驾驶座位的前端和所述载客座位的前端处均具有可视窗口,同时所述飞行器本体与所述操控系统电性连接。
13.舱门,所述舱门对应所述出入口连接在所述飞行器本体的腹部。
14.优选的,所述安装腔的内壁固定有圆弧形轨道,且所述圆弧形轨道的弦沿z轴的方向延伸,同时所述驾驶载客舱的外壁固定有圆环形圈,且所述圆弧形轨道与所述圆环形圈同心设置,并且所述圆环形圈与所述圆弧形轨道滑动连接。
15.优选的,所述安装腔的侧壁沿所述轴线l相对设置的两处均固定有第一转轴,且每个所述第一转轴的中轴线沿所述轴线l长度的方向延伸,同时所述驾驶载客舱分别与两个所述第一转轴转动连接。
16.优选的,所述飞行器本体包括:
17.机身,所述机身的中轴线沿所述x轴的方向延伸,且所述机身的尾部连接有尾翼;
18.机翼,所述机翼为两个,一一对应连接在所述机身的两侧;
19.涵道式推进装置,所述涵道式推进装置为结构相同的三个,围绕全机重心分布,并一一对应连接在所述尾翼和两个所述机翼的尾部,且每个所述涵道式推进装置的中轴线沿所述x轴的方向延伸,同时每个所述涵道式推进装置均与所述操控系统电性连接;
20.起落架,所述起落架为结构相同的三个,一一对应连接在三个所述涵道式推进装置的尾端。
21.优选的,每个所述机翼均为可折叠机翼,且其对应的所述涵道式推进装置连接在所述可折叠机翼靠近所述机身的翼段上,同时所述可折叠机翼与所述操控系统电性连接。
22.优选的,所述可折叠机翼远离所述机身的翼段上转动连接有副翼,且所述副翼通过第一舵机驱动转动,同时所述第一舵机与所述操控系统电性连接。
23.优选的,所述可折叠机翼远离所述机身的翼段设置为前掠。
24.优选的,所述涵道式推进装置包括:涵道筒、螺旋桨、推进电机、电机支架和滑流舵;
25.所述涵道筒固定在所述尾翼、所述机翼的尾部,且所述涵道筒的中轴线沿所述x轴的方向延伸,同时每个所述涵道筒的尾端固定对应的所述起落架;
26.所述螺旋桨、所述推进电机、所述电机支架和所述滑流舵自靠近所述机身前端至靠近所述机身尾端的方向依次位于所述涵道筒内,且所述电机支架与所述涵道筒的内壁固定连接,所述推进电机固定在所述电机支架上,且所述推进电机与所述操控系统电性连接,所述螺旋桨与所述推进电机的输出轴连接,同时所述滑流舵转动连接在所述涵道筒的内壁,所述涵道筒的内壁固定有与所述操控系统电性连接的第二舵机,且所述第二舵机能驱动所述滑流舵转动,以驱动所述机身可产生绕所述x轴转动的力矩。
27.优选的,用折叠式扶梯替换所述舱门。
28.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种一种尾座式载人飞行器,可以实现如下技术效果:
29.本发明由于驾驶载客舱连接在安装腔内,且驾驶载客舱可绕沿y轴方向延伸的轴线l圆周运动,则飞行器本体在操控系统的控制下进行垂直升降、垂直转平飞、平飞和平飞转垂直的过程中:驾驶载客舱会随着飞行器本体的姿态变化始终自动调整至正(驾驶员和乘客的头朝上、脚朝下)的姿态,因此会提高驾驶员和乘客的舒适性;
30.同时驾驶载客舱内固接的驾驶座位相对操控系统(操控系统安装在驾驶载客舱的具体方式是本领域的常规技术手段,即现有技术中的操控系统是相对驾驶载客舱固定不动的,在此就不再赘述操控系统与驾驶载客舱的具体连接关系,同时操控系统是本领域公知的技术,在此就不再赘述其结构)的位置始终是固定不动的,即驾驶座位上的驾驶员与操控系统是随驾驶载客舱同步转动的,因此驾驶座位上的驾驶员始终可以保持对操控系统操作的准确性和及时性,则利于驾驶员操作和观察,从而提高驾驶的安全性。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
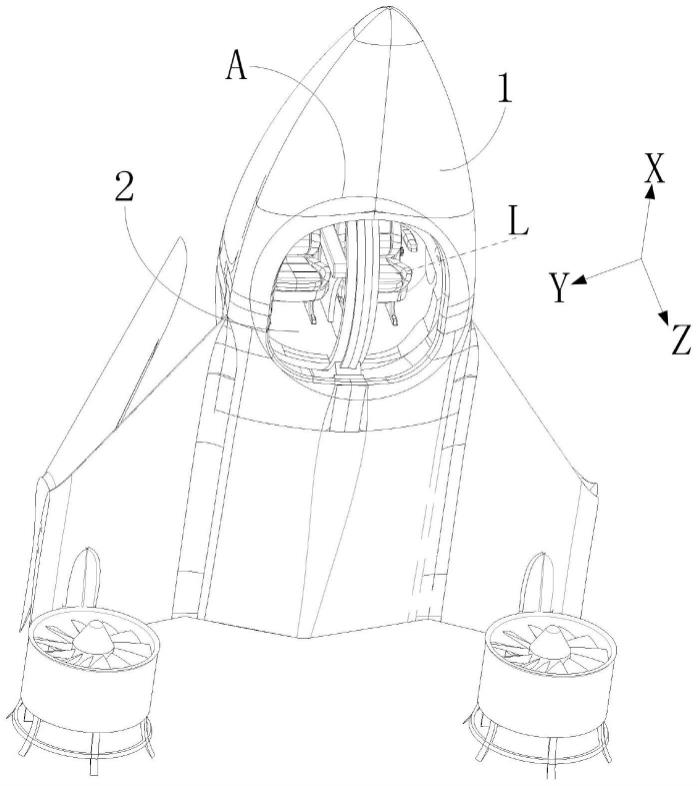
32.图1为本发明一种尾座式载人飞行器垂直状态的结构示意图;
33.图2为图1中a处的结构放大图;
34.图3为本发明驾驶载客舱的结构示意图;
35.图4为本发明一种尾座式载人飞行器水平状态的结构示意图;
36.图5为图4中b处的结构放大图;
37.图6为本发明一种尾座式载人飞行器垂直升降状态的结构示意图;
38.图7为本发明一种尾座式载人飞行器垂直-平飞状态的结构示意图;
39.图8为本发明一种尾座式载人飞行器平飞状态的结构示意图;
40.图9为本发明控制飞行器向右转动(转动方向x-,右手系)时,滑流舵偏转方向的结
构示意图;
41.图10为本发明折叠式扶梯的结构示意图;
42.图11为图10中c处的结构放大图。
43.其中,1-飞行器本体;10-安装腔;2-驾驶载客舱;200-可视窗口;101-圆弧形轨道;203-圆环形圈;102-第一转轴;11-机身;111-尾翼;12-机翼;13-涵道式推进装置;14-起落架;121-副翼;131-涵道筒;132-螺旋桨;133-推进电机;134-电机支架;135-滑流舵;4-气泵;5-换向阀;51-第一总管;52-第二总管;53-第三总管;61-第一端部套筒;63-中部套筒;71-第一滑杆;8-牵拉绳;60-空腔;91-第一通气管;92-第二通气管;711-第一活塞;601-第二转轴;602-台阶轴;603-台阶。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.本发明以机身11的中轴线为“x轴”,且机身11的头部为“前端”的方向,同时为“x+”的方向,而机身11的尾部为“后端”的方向,同时为“x
‑”
的方向;本发明以机身11的腹部和背部之间的连接为“z轴”,且机身11的腹部为“z+”的方向,机身11的背部为“z
‑”
的方向;本发明的“y”轴分别垂直“x轴”和“z轴”,且以驾驶员驾驶状态的视角为基准,机身11右侧为“y+”的方向,机身11的左侧为“y
‑”
的方向。
46.本发明实施例公开了一种尾座式载人飞行器,包括:
47.飞行器本体1,飞行器本体1的中轴线沿x轴的方向延伸,且飞行器本体1内开设有安装腔10,同时飞行器本体1背部对应安装腔10的位置安装有透明窗,飞行器本体1腹部对应安装腔10的位置开设有接通安装腔10的出入口;
48.驾驶载客舱2,驾驶载客舱2连接在安装腔10内,且驾驶载客舱2可绕沿y轴方向延伸的轴线l圆周运动,同时驾驶载客舱2内分别固接有驾驶座位和载客座位,且驾驶载客舱2内对应驾驶座位的位置安装有操控系统,并且驾驶载客舱2分别对应驾驶座位的前端和载客座位的前端处均具有可视窗口200,同时飞行器本体1与操控系统电性连接。
49.舱门,舱门对应出入口连接在飞行器本体1的腹部。
50.其中,本发明在飞行器本体1上安装透明窗是本领域的常规技术手段,在此就不再赘述透明窗的结构、材料以及与飞行器本体1的具体连接关系;
51.本发明的舱门在此实施例中为现有技术,即为本领域常规的技术手段,即为现有技术飞行器上常见的舱门,则在此就不再赘述舱门的结构及与飞行器本体1的连接关系。
52.本发明的驾驶载客舱2内不仅连接有驾驶座位,而且连接有载客座位,因此本发明能够作为小型的客机;
53.并且,本发明由于驾驶载客舱2连接在安装腔10内,且驾驶载客舱2可绕沿y轴方向延伸的轴线l圆周运动,则飞行器本体1在操控系统的控制下进行垂直升降、垂直转平飞、平飞和平飞转垂直的过程中:驾驶载客舱2会随着飞行器本体1的姿态变化始终自动调整至正(驾驶员和乘客的头朝上、脚朝下)的姿态,因此会提高驾驶员和乘客的舒适性;
54.同时驾驶载客舱2内固接的驾驶座位相对操控系统(操控系统安装在驾驶载客舱2的具体方式是本领域的常规技术手段,即现有技术中的操控系统是相对驾驶载客舱2固定不动的,在此就不再赘述操控系统与驾驶载客舱2的具体连接关系,同时操控系统是本领域公知的技术,在此就不再赘述其结构)的位置始终是固定不动的,即驾驶座位上的驾驶员与操控系统是随驾驶载客舱2同步转动的,因此驾驶座位上的驾驶员始终可以保持对操控系统操作的准确性和及时性),则利于驾驶员操作和观察,从而提高驾驶的安全性。
55.为了进一步优化上述技术方案,安装腔10的内壁固定有圆弧形轨道101,且圆弧形轨道101的弦沿z轴的方向延伸,同时驾驶载客舱2的外壁固定有圆环形圈203,且圆弧形轨道101与圆环形圈203同心设置,并且圆环形圈203与圆弧形轨道101滑动连接。
56.其中,驾驶载客舱2可以为空心球状结构,且每个可视窗口200均与驾驶载客舱2的内腔接通。
57.另外,圆环形圈203与圆弧形轨道101滑动连接,具体可以为:圆弧形轨道101的内凹面(靠近驾驶载客舱2的一面)沿其圆周方向开设有第一弧形槽,且圆环形圈203的外缘滑动连接在第一弧形槽内。
58.本技术采用上述技术方案,使驾驶载客舱2通过圆环形圈203可以在安装腔10中做绕沿y轴方向延伸的轴线l圆周运动,且使驾驶载客舱2运动的同时不会脱离安装腔10。
59.为了进一步优化上述技术方案,安装腔10的侧壁沿轴线l相对设置的两处均固定有第一转轴102,且每个第一转轴102的中轴线沿轴线l长度的方向延伸,同时驾驶载客舱2分别与两个第一转轴102转动连接。
60.其中,驾驶载客舱2沿轴线l相对设置的两侧一一对应与两个第一转轴102转动连接,
61.本技术采用上述技术方案,同时用第一转轴102限定驾驶载客舱2,则提高驾驶载客舱2绕轴线l圆周运动的稳定性。
62.为了进一步优化上述技术方案,飞行器本体1包括:
63.机身11,机身11的中轴线沿x轴的方向延伸,且机身11的尾部连接有尾翼111;
64.机翼12,机翼12为两个,一一对应连接在机身11的两侧;
65.涵道式推进装置13,涵道式推进装置13为结构相同的三个,围绕全机重心分布,并一一对应连接在尾翼111和两个机翼12的尾部,且每个涵道式推进装置13的中轴线沿x轴的方向延伸,同时每个涵道式推进装置13均与操控系统电性连接;
66.起落架14,起落架14为结构相同的三个,一一对应连接在三个涵道式推进装置13的尾端。
67.其中,本发明垂直起降阶段时:三个涵道式推进装置13提供升力,以及控制姿态、速度和轨迹,同时两个机翼12为收缩状态;本发明在降落时,通过起落架14着地;本发明在平飞阶段时,通过三个涵道式推进装置13提供推力,通过两个机翼12提供升力。
68.本技术采用上述技术方案,通过三发涵道推进尾座式布局,则使本发明不需要大型可动机构做动力机构,从而降低本发明的维修难度和成本,同时利于减轻本发明飞行器本体1的重量。
69.为了进一步优化上述技术方案,每个机翼12均为可折叠机翼,且其对应的涵道式推进装置13连接在可折叠机翼靠近机身11的翼段上,同时可折叠机翼与操控系统电性连
接。
70.其中,可折叠机翼为本领域常规的技术手段,且可折叠机翼如何与操控系统电性连接也是本领域的公知常识,则在此就不再赘述可折叠机翼的结构,以及不再赘述可折叠机翼如何与操控系统电性连接。
71.本发明采用上述技术方案,当本发明在竖直起降阶段,在操控系统的控制下,可以控制可折叠机翼为折叠状态,从而较小本发明的体积,以降低本发明升降的阻力;当本发明在平飞时,在操控系统的控制下,可以控制可折叠机翼为展开状态,以使通过机翼12提供升力。
72.为了进一步优化上述技术方案,可折叠机翼远离机身11的翼段上转动连接有副翼121,且副翼121通过第一舵机驱动转动,同时第一舵机与操控系统电性连接。
73.其中,副翼121的结构为本领域中的公知常识,且副翼121分别与机翼以及第一舵机的连接关系、第一舵机的位置以及与飞行器的连接关系、第一舵机与操控系统如何电性连接等均为现有技术,在此就不再赘述。
74.本技术采用上述技术方案,可以通过副翼121辅助扰流,以辅助提供机身11绕x轴、y轴或z轴转动的力矩(因左右副翼121偏转方向不同,改变了左右机翼12的迎角,左右升力不相等,则使机身11产生绕x轴方向的力矩,同时飞机来流产生侧滑角,机身垂尾使机身11产生绕z轴方向的力矩;因副翼121同时偏转扰流后升力变化不经过重心,则使机身11产生绕y轴方向的力矩,此为本领域的公知常识)。
75.为了进一步优化上述技术方案,可折叠机翼远离机身11的翼段(从翼尖到折叠转角处)设置为前掠。
76.其中,“前掠”为本领域的公知常识(可折叠机翼远离机身11的翼段的平均气动弦长连线(从翼根到翼尖的连线)与机身11轴线(从机尾到机头的连线)夹角为锐角),在此就不再赘述。
77.本技术采用上述技术方案,使翼尖距离地面更远,以便于机身11在竖直状态时登机。
78.为了进一步优化上述技术方案,涵道式推进装置13包括:涵道筒131、螺旋桨132、推进电机133、电机支架134和滑流舵135;
79.涵道筒131固定在尾翼111、机翼12的尾部,且涵道筒131的中轴线沿x轴的方向延伸,同时每个涵道筒131的尾端固定对应的起落架14;
80.螺旋桨132、推进电机133、电机支架134和滑流舵135自靠近机身11前端至靠近机身11尾端的方向依次位于涵道筒131内,且电机支架134与涵道筒131的内壁固定连接,推进电机133固定在电机支架134上,且推进电机133与操控系统电性连接,螺旋桨132与推进电机133的输出轴连接,同时滑流舵135转动连接在涵道筒131的内壁,涵道筒131的内壁固定有与操控系统电性连接的第二舵机,且第二舵机能驱动滑流舵135转动,以产生驱动机身11可绕x轴转动的力矩。
81.其中,滑流舵135为对称翼型;
82.另外,第二舵机与滑流舵135的连接为本领域的公知常识,且第二舵机如何与操控系统电性连接为现有技术,则在此就不再赘述。
83.并且,其中一个滑流舵135就可以产生驱动机身11绕x轴转动的力矩,但因扰流的
力是产生于滑流舵135面上,所以同时产生绕y,z转动的力矩,以图9中涵道式推进装置b中的滑流舵135为例,当其上偏(旋转方向y-,右手系)时,气流产生一个作用点位于该滑流舵135处、大致沿机腹方向(主要z+且有x-分量)方向的力,该力不过重心,机身11产生力矩的分量为x-、y+、z-,其中y+、z-力矩可由另两个滑流舵135的力矩平衡,最后仅保留x方向的力矩。
84.本技术采用上述技术方案,螺旋桨132、推进电机133、电机支架134和滑流舵135自靠近机身11前端至靠近机身11尾端的方向依次位于涵道筒131内,则涵道筒131可起到保护螺旋桨132、推进电机133、电机支架134和滑流舵135的作用,而且具有整流的作用,同时可减小螺旋桨132尖诱导阻力,并提高滑流舵135的效率,以及降低人员误碰旋转部件的危险系数;
85.推进电机133驱动螺旋桨132转动,螺旋桨132转动吹出气流,且该气流通过滑流舵135流出,则可通过第二舵机控制滑流舵135转动,以通过滑流舵135的偏转改变气流的吹出方向,从而能驱动机身11可产生绕x轴转动的力矩,因此实现偏航控制或消除单个螺旋桨132在旋转时给机身11带来的力矩。
86.本发明的飞行器在垂直升降阶段(为了便于表述,将连接在尾翼111尾部的涵道式推进装置13称为涵道式推进装置a,将以驾驶员驾驶的视角为基准的连接在右侧机翼12尾部的涵道式推进装置13称为涵道式推进装置b,将以驾驶员驾驶的视角为基准的连接在左侧机翼12尾部的涵道式推进装置13称为涵道式推进装置c):
87.若想控制飞行器向x+方向运动,则同时增加涵道式推进装置a、涵道式推进装置b、涵道式推进装置c中推进电机133的转速,则对应螺旋桨132产生的推力增加,飞行器受到的升力增加,合力为x+方向,向上运动;反之若想控制飞行器向x-方向运动,则同时减少涵道式推进装置a、涵道式推进装置b、涵道式推进装置c中推进电机133的转速;
88.若想控制飞行器向y+方向(右机翼)运动,则减少涵道式推进装置c中推进电机133的转速,增加涵道式推进装置b中推进电机133的转速,飞行器受到一个右倾转力矩(转动方向z+,右手系),飞行器右倾,涵道式推进装置a、涵道式推进装置b、涵道式推进装置c产生的力和重力的合力指向y+方向,飞行器向y+方向运动;反之若想控制飞行器向y-方向(左机翼)运动,则应增加涵道式推进装置c中推进电机133的转速,减小涵道式推进装置b中推进电机133的转速。
89.若想控制飞行器向z+方向(机腹)运动,则同时减少涵道式推进装置b、涵道式推进装置c中推进电机133的转速,增加涵道式推进装置a中推进电机133的转速,飞行器受到一个低头力矩(转动方向y-,右手系),飞行器低头,道式推进装置a、道式推进装置b、道式推进装置c产生的力和重力的合力指向z+方向,飞行器向z+方向运动;反之若想控制飞行器向z-方向(机背)运动,则应同时增加涵道式推进装置b、涵道式推进装置c中推进电机133的转速,减小涵道式推进装置a中推进电机133转速。
90.若想控制飞行器向右转动(转动方向x-,右手系),则调节涵道式推进装置a中滑流舵135右偏(旋转方向z-,右手系),此时涵道式推进装置a中吹出的气流右偏(有y+方向的速度分量),滑流舵135舵面产生让机身11旋转的力矩(转动方向x-,右手系)使飞行器右转,同时调节涵道式推进装置b中滑流舵135上偏(旋转方向y-,右手系)、调节涵道式推进装置c的滑流舵135下偏(旋转方向y+,右手系),如图9箭头所示,气流产生力矩使得飞行器向右转
动;反之若想控制飞行器向左转动,则应调节涵道式推进装置a中的滑流舵135左偏,涵道式推进装置b的滑流舵135下偏,调节涵道式推进装置c的滑流舵135上偏。
91.若想控制飞行器向机腹方向倾斜(转动方向y-,右手系),控制方式可见控制飞行器向z+方向(机腹)运动;反之若想控制飞行器向机背方向倾斜(转动方向y+,右手系),控制方式可见控制飞行器向z-方向(机腹)运动;
92.若想控制飞行器向右机翼倾斜(转动方向z+,右手系),控制方式可见控制飞行器向y+方向(右机翼)运动;反之若想控制飞行器向左机翼方向倾斜(转动方向z-,右手系),控制方式可见控制飞行器向y-方向(机腹)运动。
93.在飞行器处平飞状态时,飞行器的控制主要依靠副翼121实现,该实现方式与常规的飞翼式布局飞行器相同,在此基础上,也可通过三个涵道式推进装置13差动,以产生驱动机身11绕y轴、z轴方向的旋转力矩,或通过滑流舵135,使机身11产生绕x轴方向旋转的力矩,以作为辅助控制手段(滑流舵135在此阶段的工作原理与飞行器在垂直起降阶段的工作原理相同)。
94.飞行器处于垂直-平飞过渡状态的过程实质就是飞行器绕y轴转动的过程,从垂直状态转到平飞状态时需要飞行器低头,旋转方向y-;从平飞状态转到垂直状态时需要飞行器低头,旋转方向y+;该过程(指的是从平飞状态到起降状态的倾转过渡的过程)的控制主要依靠3套涵道式推进装置13中螺旋桨132的推力差和3套涵道式推进装置13中的滑流舵135实现(控制方式与前述的垂直状态控制方式相同,在此就不再赘述);在此基础上,还可以通过副翼121辅助扰流,以提供驱动机身11绕y轴转动的力矩(因副翼副翼121扰流后升力变化不经过重心,则产生绕y轴方向的力矩)。
95.为了进一步优化上述技术方案,用折叠式扶梯替换舱门,折叠式扶梯包括:气泵4、换向阀5、第一总管51、第二总管52、第三总管53、第一端部套筒61、第二端部套筒、多个中部套筒63、多个第一滑杆71和多个牵拉绳8,且气泵4和换向阀5均与操控系统电性连接;
96.其中,第一端部套筒61、第二端部套筒和每个中部套筒63的侧壁和两端均为封闭端,内部均具有空腔60,且第一端部套筒61、第二端部套筒和每个中部套筒63的侧壁中部均连接有第一通气管91,第一端部套筒61的一端、第二端部套筒的一端和每个中部套筒63的两端均连接有第二通气管92,且每个第一通气管91和每个第二通气管92均与对应的空腔60接通,同时多个第一通气管91均接通在第一总管51上,多个第二通气管92均接通在第二总管52上,第一总管51和第二总管52均接通在换向阀5上,换向阀5通过第三总管53与气泵4接通;
97.同时,第一端部套筒61远离对应第二通气管92的一端绕轴线o转动连在机身11的腹部,且轴线o的长度沿y轴的方向延伸,第一端部套筒61与机身11腹部的转动连接端位于出入口和机身11的尾部之间,并靠近出入口;第一端部套筒61、第二端部套筒和多个中部套筒63共线并间隔设置,且多个中部套筒63位于第一端部套筒61和第二端部套筒之间,同时第一端部套筒61与相邻的第二端部套筒之间、第二端部套筒与相邻的第二端部套筒之间,以及每相邻两个第二端部套筒之间均具有第一滑杆71,并且第一端部套筒61、第二端部套筒、多个中部套筒63和多个第一滑杆71的中轴线共线;同时,第二端部套筒与机身11可拆卸连接;
98.并且,第一端部套筒61靠近对应第二通气管92的一端、第二端部套筒靠近对应第
二通气管92的一端,以及每个中部套筒63的两端均开设有与对应空腔60接通的第一安装口,每个第一滑杆71的每端穿过对应的第一安装口位于对应的空腔60内,且每个第一滑杆71的每端均固定有第一活塞711,每个第一活塞711可沿对应空腔60的长度方向往复移动,并与对应空腔60的内壁密封滑动接触;
99.每个空腔60内均具有第二转轴601,且每个第二转轴601的中轴线均平行轴线o,同时每个第二转轴601的端部贯穿对应空腔60的侧壁并位于对应空腔60之外,并且每个第二转轴601与对应空腔60的侧壁密封转动连接;每个第二转轴601位于对应空腔60内的部位垂直连接有台阶轴602,同时,每个第二转轴601位于对应空腔60外的端部垂直连接有台阶603,同时每个台阶603与对应的台阶轴602平行,且当每个台阶603转动至水平状态时,每个台阶603对应的台阶轴602的两端均卡接在对应空腔60的内壁上;
100.多个牵拉绳8平行且间隔设置,且多个牵拉绳8的一个同端均固定在机身11上,另一个同端均固接在对应第二端部套筒的台阶603上,同时每个中部套筒63对应的台阶603均分别与多个牵拉绳8固接。
101.其中,第二端部套筒与机身11可拆卸连接具体可以是锁接,而锁接的具体结构为现有技术,在此就不再赘述。
102.本技术采用上述技术方案,当需要将出入口打开(折叠式扶梯展开)时,则可以手动将第二端部套筒与机身11解锁,并控制气泵4和换向阀5,使气泵4产生的气体通过每个第一通气管91进入对应的空腔60中,且每个空腔60通过对应的第二通气管92排气,则气压推动每个空腔60中对应的第一滑杆7向远离对应空腔60的方向移动,从而使每相邻两个台阶603之间的距离增加,同时各级台阶603在重力和牵拉绳8牵引的作用下,角度从平行对应的套筒变为因对应的台阶轴602的两端卡接在对应空腔60的内壁(此时,台阶轴602与对应空腔60侧壁之间的夹角约为45度),而变为水平状态,同时第一端部套筒61的外壁抵接在地面上,则此时,折叠式扶梯为展开状态,可供人踩踏。
103.当需要将折叠式扶梯收起来时,则控制气泵4和换向阀5,使气泵4产生的气体通过每个第二通气管92送气,同时通过每个第一通气管91排气,则使每个空腔60中对应的第一滑杆7做回缩运动,从而使每相邻两个台阶603之间的距离减小,且将收缩的折叠式扶梯向靠近机身11的方向转动,则每个台阶603不再受牵拉绳8的牵拉作用,直至折叠式扶梯遮盖住出入口,最后将第二端部套筒与机身11锁接即可,则此时折叠式扶梯可作为出入口的舱门。
104.为了进一步优化上述技术方案,在第二端部套筒上固定有第一接地座,从而降低第二端部套筒的磨损,以提高其使用寿命。
105.为了进一步优化上述技术方案,第二端部套筒远离中部套筒63的一端连接有第三通气管,且第三通气管的一端与第二端部套筒的空腔60接通,另一端接通在第二总管52上;同时,第二端部套筒远离中部套筒63的一端开设有第二安装口,且第二安装口与第二端部套筒的空腔60接通,并且第二端部套筒的空腔60内密封滑动连接有可沿第二端部套筒长度方向延伸的第二活塞,第二活塞上固定有第二滑杆,且第二滑杆的中轴线与第二端部套筒的中轴线共线,同时第二滑杆远离第二活塞的一端穿过第二安装口位于第二端部套筒的空腔60外,并固定有第二接地座。
106.本技术采用上述方案,工作原理与上个方案的工作原理相同,与上个方案不同的
是:本发明中是通过连接在第二滑杆上的第二接地座抵接在地面上。
107.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
108.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1