1.本实用新型涉及航拍技术领域,具体为一种双旋翼无人机。
背景技术:2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,无人机按应用领域,可分为军用与民用,民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.现有的无人机的摄像模块多安装于机体中部下方或一端,可视范围受机体结构阻碍,难以实现全景观察和拍摄。
技术实现要素:4.本实用新型的目的在于提供一种双旋翼无人机,以解决上述背景技术中提出的难以实现全景观察和拍摄的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种双旋翼无人机,包括水平对置的双旋翼、尾翼控制模块与定向尾翼,左右所述双旋翼之间通过连接杆连接固定,且连接杆上中部转动设有摄像模块,所述尾翼控制模块设在连接杆底部左右两侧,且尾翼控制模块上活动连接有用于控制向下气流导向的定向尾翼。
6.优选的,所述连接杆内纵向开设有能够容纳旋翼固定基座的安装槽,且双旋翼安装在旋翼固定基座上,所述连接杆内横向设有中心轴,且中心轴横向贯穿安装槽并与旋翼固定基座刚性连接,所述连接杆内左右两侧均设有电池块,且电池块位于中心轴的前方与后方。
7.优选的,所述摄像模块包括套设在连接杆外部的套体、设在套体外壁左侧的齿槽、设在连接杆上的电机、主驱动齿轮、设在套体内部的摄像组件、电刷与集电环,所述套体通过轴承与连接杆外壁连接,且电刷设在套体右端部,所述集电环设在连接杆的外壁上,且集电环与电池块电性连接,所述电刷与集电环滑动接触用于传输信号与电流,所述电机的输出轴与主驱动齿轮连接,且主驱动齿轮与齿槽啮合,所述电机与电池块电性连接,所述电刷与摄像组件电性连接。
8.优选的,所述尾翼控制模块内开设有活动腔体,且定向尾翼顶部安装端与锥形座连接,所述锥形座通过弹簧或万向轴与活动腔体内壁连接,所述锥形座上设有永磁体,且活动腔体内壁上设有电磁铁。
9.优选的,所述定向尾翼为十字形定向尾翼。
10.与现有技术相比,本实用新型的有益效果是:
11.1)本实用新型使用对称双旋翼结构,旋翼下方有定向尾翼,起到飞行稳定和控制
水平移动方向或水平旋转的作用,结构简单稳定,易于操控,飞行稳定。
12.2)本实用新型无人机的摄像模块安装在两个旋翼连接轴的中部,并且可以围绕连轴进行垂直轴向的旋转,使得可视范围扩大为360
°
(垂直旋转)*360
°
(水平旋转),实现全景观察和拍摄功能,因为没有视觉死角,可以配合智能穿戴设备或人工只能完成室内、外的巡查或全景拍摄工作,适用更多场景。
附图说明
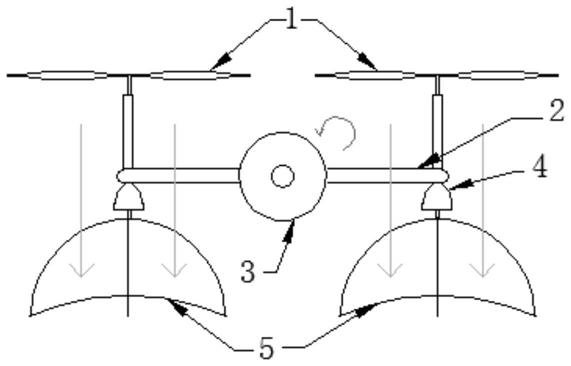
13.图1为本实用新型结构示意图;
14.图2为本实用新型定向尾翼偏转示意图;
15.图3为本实用新型永磁体结构示意图;
16.图4为本实用新型摄像模块内部结构示意图。
17.图中:1、双旋翼;2、连接杆;3、摄像模块;4、尾翼控制模块;5、定向尾翼;6、旋翼固定基座;7、中心轴;8、电池块;9、套体;10、主驱动齿轮;11、电机;12、摄像组件;13、集电环;14、电磁铁;15、永磁体;16、万向轴;17、电刷;18、齿槽。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
20.实施例:
21.请参阅图1-4,本实用新型提供一种技术方案:一种双旋翼无人机,包括水平对置的双旋翼1、尾翼控制模块4与定向尾翼5,左右所述双旋翼1之间通过连接杆2连接固定,且连接杆2上中部转动设有摄像模块3,摄像模块3可以围绕连接杆2进行垂直轴向的旋转,使得可视范围扩大为360
°
(垂直旋转)*360
°
(水平旋转),实现全景观察和拍摄功能,所述尾翼控制模块4设在连接杆2底部左右两侧,且尾翼控制模块4上活动连接有用于控制向下气流导向的定向尾翼5,定向尾翼5能够控制双旋翼1产生向下气流导向,无人机的水平向旋转、前后左右移动,是通过定向尾翼5的偏转方向来控制,定向尾翼5方向通过尾翼控制模块4调节。
22.所述连接杆2内纵向开设有能够容纳旋翼固定基座6的安装槽,且双旋翼1安装在旋翼固定基座6上,所述连接杆2内横向设有中心轴7,且中心轴7横向贯穿安装槽并与旋翼固定基座6刚性连接,所述连接杆2内左右两侧均设有电池块8,且电池块8位于中心轴7的前方与后方,电池块8可做配重,同时为摄像模块3提供电能。
23.所述摄像模块3包括套设在连接杆2外部的套体9、设在套体9外壁左侧的齿槽18、设在连接杆2上的电机11、主驱动齿轮10、设在套体9内部的摄像组件12、电刷17与集电环
13,所述套体9通过轴承与连接杆2外壁连接,因此套体9能够通过轴承在连接杆2外壁进行转动,且电刷17设在套体9右端部,所述集电环13设在连接杆2的外壁上,且集电环13与电池块8电性连接,电池块8用于提供电能至集电环13,所述电刷17与集电环13滑动接触用于传输信号与电流,电刷17由贵金属合金制成,呈“ii”字形,与集电环13的“v”、“凹”字形对称双接触。电刷17的弹性压力与集电环13的凹槽滑动接触,以传输信号和电流,将电池块8的电能通过集电环13、电刷17传输至摄像组件12使摄像组件12能够通电工作,所述电机11的输出轴与主驱动齿轮10连接,且主驱动齿轮10与齿槽18啮合,所述电机11与电池块8电性连接,电机11工作时能够带动主驱动齿轮10转动,主驱动齿轮10与齿槽18啮合带动套体9转动,从而带动套体9内的摄像组件12转动,实现360
°
无死角全景观察与拍摄,所述电刷17与摄像组件12电性连接。
24.所述尾翼控制模块4内开设有活动腔体,且定向尾翼5顶部安装端与锥形座连接,所述锥形座通过弹簧或万向轴16与活动腔体内壁连接,所述锥形座上设有永磁体15,且活动腔体内壁上设有电磁铁14,尾翼控制模块4中电磁铁14通电与永磁体15产生同性磁性,同性相斥,从而推动定向尾翼5的偏转方向和角度。
25.所述定向尾翼5为十字形定向尾翼。
26.工作原理:水平对置的双旋翼1为无人机提供升力,镜像旋转相互抵消旋转偏向力,定向尾翼5能够控制双旋翼1产生向下气流导向,无人机的水平向旋转、前后左右移动,是通过定向尾翼5的偏转方向来控制,定向尾翼5方向通过尾翼控制模块4调节,尾翼控制模块4中电磁铁14通电与永磁体15产生同性磁性,同性相斥,从而推动定向尾翼5的偏转方向和角度,当电机11工作带动主驱动齿轮10转动时,带动套体9以连接杆2为轴心做旋转运动。
27.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
28.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。