一种四自由度码垛机器人的制作方法
1.本发明公开了一种四自由度码垛机器人,属于机器人领域。
背景技术:
2.码垛机器人,是机械与计算机程序有机结合的产物。为现代生产提供了更高的生产效率。码垛机器在码垛行业有着相当广泛的应用。码垛机器人大大节省了劳动力,节省空间。码垛机器人运作灵活精准、快速高效、稳定性高,作业效率高。
3.但现有码垛机器人存在动力不足,以及抓手不能夹持紧固目标物体。
技术实现要素:
4.本发明针对现有码垛机器人存在的不足,提供一种采用电液混合驱动、负载能力强、夹持紧固的一种四自由度码垛机器人。
5.本发明所采用的技术方案是:所述一种四自由度码垛机器人包括支撑组件、连接组件、传动组件和码垛夹具手;支撑组件通过通孔ⅰ与连接组件螺钉连接,连接组件与传动组件通过连接通孔与连接螺纹孔配合实现螺钉连接,传动组件通过支撑副板与连接臂焊接实现固定连接,码垛夹具手通过下通孔与夹具箱体通孔配合实现螺栓连接。
6.所述支撑组件包括交叉滚子轴承、支撑盖、支撑体、支撑座和伺服电机ⅰ;交叉滚子轴承通过通孔ⅱ与支撑盖螺钉连接,支撑盖与支撑体通过焊接实现固定连接,支撑体与支撑座通过焊接实现固定连接,伺服电机ⅰ与内圈固定连接,交叉滚子轴承包括内圈和外圈,内圈和外圈可相对转动,同时内圈1-1-1高出外圈1-1-2的高度为h1,其中,h1的取值范围是:2mm< =h1<=4mm;内圈通过通孔ⅰ与连接通孔的配合实现与连接组件螺栓连接,外圈通过通孔ⅱ与支撑盖螺钉连接,这样就实现了在伺服电机ⅰ的驱动下,连接组件、传动组件和码垛夹具手可相对支撑组件做旋转运动;支撑体设置有窗口,为了便于伺服电机ⅰ的安装和拆卸;支撑座设置有地脚通孔,地脚通孔阵列于支撑座的四周,其中,地脚通孔的数目为4x1,x1的取值范围是1~2,地脚通孔设计的目的是为了将支撑组件更好地固定在地面上;内圈设置有通孔ⅰ,通孔ⅰ阵列于内圈上,其中,通孔ⅰ的数目为3x2,x 2
的取值范围是2~3;外圈设置有通孔ⅱ,通孔ⅱ阵列于外圈上,其中,通孔ⅱ的数目为3x3,x3的取值范围是2~3。所述连接组件包括连接架、滑动模块和驱动模块;滑动模块与连接架通过滑动导轨与滑槽实现配合连接,使得滑动模块可以做直线运动;驱动模块与连接架通过支撑块固定连接,连接架设置有滑动导轨、连接通孔和连接臂,滑动模块包括连接板、滑动块和固定块,滑动块与连接板固定连接,固定块与连接板固定连接,驱动模块包括驱动丝杠、支撑块和驱动端,驱动端与伺服电机ⅳ配合连接,实现驱动丝杠的旋转;驱动丝杠与支撑块配合连接,所述驱动丝杠与固定螺纹连接,使得驱动丝杠旋转可以带动驱动模块在滑动导轨上做直线运动;连接板有连接通孔,滑动块设置有滑槽,固定块设置有固定螺纹。
7.所述传动组件包括传动主臂、支撑副臂、横架、中间机构、曲柄和连杆;传动主臂通
过销钉ⅰ与横架连接,支撑副臂通过销钉ⅱ、轴承与横架连接;所述曲柄与横架销钉连接,连杆与曲柄,中间机构分别与连杆和横架销钉连接;横架、曲柄、连杆和中间机构都是通过销钉连接相互连接在一起,并且曲柄的长度为a,中间机构与横架和连杆连接点之间的距离是b,横架的长度为c,连杆的长度为d,同时,它们之间的长度关系是:a<b<c<d且a+d>b+c,这样横架、曲柄、连杆和中间机构就构成曲柄—摇杆的机械结构;传动主臂设置有销钉ⅰ和连接螺纹孔,支撑副臂设置有销钉ⅱ和支撑副板,横架设置有小型伺服电机,小型伺服电机与曲柄配合连接,用于驱动曲柄实现整周旋转。
8.所述中间机构包括机构箱体、支撑台、中型伺服电机、减速装置连接杆和交叉滚子轴承;支撑台通过支撑箱体与箱体左室配合与机构箱体实现配合连接,中型伺服电机通过箱体右室与机构箱体配合连接,减速装置通过连接杆与支撑台配合连接,减速装置通过小齿轮与伺服电机配合连接,连接杆通过大齿轮与减速装置配合连接,连接杆通过支撑柱与支撑台配合连接;交叉滚子轴承通过上通孔与左室通孔配合与机构箱体实现螺栓连接,机构箱体设置有箱体左室和箱体右室,支撑台包括支撑箱体、支撑柱和下连接端,支撑箱体通过支撑箱体通孔与支撑柱的过盈配合实现与支撑柱的连接,减速装置由大齿轮、齿轮链条和小齿轮组成,大齿轮与齿轮链条实现齿轮—齿条配合,小齿轮与齿轮链条实现齿轮-齿条配合;交叉滚子轴承包括上轴承圈和下轴承圈,箱体左室设置有左室通孔,支撑箱体设置有支撑箱体通孔;上轴承圈设置有上通孔,上通孔阵列于上轴承圈上,其中,上通孔的数目为3x4,x4的取值范围是2~3,下轴承圈设置有下通孔,下通孔阵列于下轴承圈上,其中,下通孔的数目为3x5,x5的取值范围是2~3。
9.所述码垛夹具手包括夹具箱体、夹具部件、夹具钉和液压动力机构;夹具箱体通过下连接块通孔与液压动力机构螺钉连接,夹具部件与液压动力机构通过直杆配合连接,夹具钉与夹具部件螺纹连接固定,并且,夹具钉交叉地与夹具部件固定连接,这样就能更好地达到牢固可靠的抓取目标物的母的,同时夹具钉的数目为n,n取值范围是6~10液压动力机构通过直杆与夹具箱体配合连接,夹具箱体设置有夹具箱体通孔,液压动力机构包括液压缸组件、下连接块、中间板和直杆,液压缸组件与下连接块固定连接,中间板与液压缸组件销钉连接,直杆与中间板固定连接;液压缸组件通过液压驱动中间板运动,迫使与其固定连接的直杆发生转动。
10.本发明的有益效果在于:与现有技术相比,本发明结构简洁,各部分连接可靠;液压驱动可输出大转矩,负载与自身重量比值大,使用效果好,便于推广应用。
附图说明
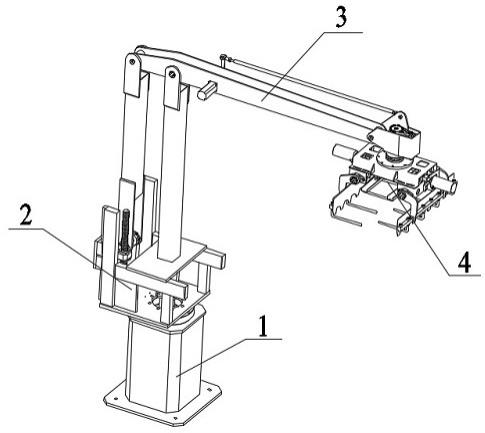
11.图1所示为一种四自由度码垛机器人的示意图;图2所示为一种四自由度码垛机器人的支撑组件示意图;图3所示为一种四自由度码垛机器人的连接组件及其分解示意图;图4所示为一种四自由度码垛机器人的传动组件及其分解示意图;图5所示为一种四自由度码垛机器人的中间结构及其分解示意图;图6所示为一种四自由度码垛机器人的码垛夹具手及其分解示意图。
具体实施方式
12.结合图1~图6说明本实施方式。
13.本实施方式提供了一种四自由度码垛机器人;所述一种四自由度码垛机器人包括支撑组件(1)、连接组件(2)、传动组件(3)和码垛夹具手(4);支撑组件(1)通过通孔ⅰ(1-1-1-1)与连接组件(2)连接在一起,连接组件(2)与传动组件(3)通过连接通孔(2-2-1-1)与连接螺纹孔(3-1-2)配合实现螺钉连接,传动组件(3)通过支撑副板(3-2-2)与连接臂(2-1-3)焊接实现固定连接,码垛夹具手(4)通过下通孔(3-4-6-2-1)与夹具箱体通孔(4-1-1)配合实现螺栓连接。
14.所述支撑组件(1)包括交叉滚子轴承(1-1)、支撑盖(1-2)、支撑体(1-3)、支撑座(1-4)和伺服电机ⅰ(1-5);交叉滚子轴承(1-1)通过通孔ⅱ(1-1-2-1)与支撑盖(1-2)螺钉连接,支撑盖(1-2)与支撑体(1-3)通过焊接实现固定连接,支撑体(1-3)与支撑座(1-4)通过焊接实现固定连接,伺服电机ⅰ(1-5)与内圈(1-1-1)固定连接,交叉滚子轴承(1-1)包括内圈(1-1-1)和外圈(1-1-2),内圈(1-1-1)和外圈(1-1-2)可相对转动,同时内圈(1-1-1)高出外圈(1-1-2)的高度为h1,其中,h1的取值范围是:2mm< =h1<=4mm,本具体实施方式中:h1=3mm。内圈(1-1-1)通过通孔ⅰ(1-1-1-1)与连接通孔(2-1-2)的配合实现与连接组件(2)螺栓连接,外圈(1-1-2)通过通孔ⅱ(1-1-1-2)与支撑盖(1-2)螺钉连接,这样就实现了在伺服电机ⅰ(1-5)的驱动下,连接组件(2)、传动组件(3)和码垛夹具手(4)可相对支撑组件(1)做旋转运动。支撑体(1-3)设置有窗口(1-3-1),为了便于伺服电机ⅰ(1-5)的安装和拆卸。支撑座(1-4)设置有地脚通孔(1-4-1),地脚通孔(1-4-1)阵列于支撑座(1-4)的四周,其中,地脚通孔(1-4-1)的数目为4x1,x1的取值范围是1~2,本具体实施方式中:x1=1,地脚通孔(1-4-1)设计的目的是为了将支撑组件(1)更好地固定在地面上。内圈(1-1-1)设置有通孔ⅰ(1-1-1-1),通孔ⅰ(1-1-1-1)阵列于内圈(1-1-1)上,其中,通孔ⅰ(1-1-1-1)的数目为3x2,x 2
的取值范围是2~3,本具体实施方式中:x2=2。外圈(1-1-2)设置有通孔ⅱ(1-1-1-2),通孔ⅱ(1-1-1-2)阵列于外圈(1-1-2)上,其中,通孔ⅱ(1-1-1-2)的数目为3x3,x3的取值范围是2~3,本具体实施方式中:x3=2。所述连接组件(2)包括连接架(2-1)、滑动模块(2-2)和驱动模块(2-3)。滑动模块(2-2)与连接架(2-1)通过滑动导轨(2-1-1)与滑槽(2-2-2-1)实现配合连接,使得滑动模块(2-2)可以做直线运动。驱动模块(2-3)与连接架(2-1)通过支撑块(2-3-2)固定连接,连接架(2-1)设置有滑动导轨(2-1-1)、连接通孔(2-1-2)和连接臂(2-1-3),滑动模块(2-2)包括连接板(2-2-1)、滑动块(2-2-2)和固定块(2-2-3),滑动块(2-2-2)与连接板(2-2-1)固定连接,固定块(2-2-3)与连接板(2-2-1)固定连接,驱动模块(2-3)包括驱动丝杠(2-3-1)、支撑块(2-3-2)和驱动端(2-3-3),驱动端(2-3-3)与伺服电机ⅳ配合连接,实现驱动丝杠(2-3-1)的旋转。驱动丝杠(2-3-1)与支撑块(2-3-2)配合连接,所述驱动丝杠(2-3-1)与固定螺纹(2-2-3-1)螺纹连接,使得驱动丝杠(2-3-1)旋转可以带动驱动模块(2-3)在滑动导轨(2-1-2)上做直线运动。连接板(2-2-1)有连接通孔(2-2-1-1),滑动块(2-2-2)设置有滑槽(2-2-2-1),固定块(2-2-3)设置有固定螺纹(2-2-3-1)。
15.所述传动组件(3)包括传动主臂(3-1)、支撑副臂(3-2)、横架(3-3)、中间机构(3-4)、曲柄(3-5)和连杆(3-6)。传动主臂(3-1)通过销钉ⅰ(3-1-1)与横架(3-3)连接,支撑副臂(3-2)通过销钉ⅱ(3-2-1)、轴承与横架(3-3)连接;所述曲柄(3-5)与横架(3-3)销钉连接,
连杆(3-6)与曲柄(3-5),中间机构(3-4)分别与连杆(3-6)和横架(3-3)销钉连接;横架(3-3)、曲柄(3-5)、连杆(3-6)和中间机构(3-4)都是通过销钉连接相互连接在一起,并且曲柄(3-5)的长度为a,中间机构(3-4)与横架(3-3)和连杆(3-6)连接点之间的距离是b,横架(3-3)的长度为c,连杆(3-6)的长度为d,同时,它们之间的长度关系满足:a<b<c<d且a+d>b+c,这样横架(3-3)、曲柄(3-5)、连杆(3-6)和中间机构(3-4)就构成曲柄—摇杆的机械结构;传动主臂(3-1)设置有销钉ⅰ(3-1-1)和连接螺纹孔(3-1-2),支撑副臂(3-2)设置有销钉ⅱ(3-2-1)和支撑副板(3-2-2),横架(3-3)设置有小型伺服电机(3-3-1),小型伺服电机(3-3-1)与曲柄(3-5)配合连接,用于驱动曲柄(3-5)实现整周旋转。
16.所述中间机构(3-4)包括机构箱体(3-4-1)、支撑台(3-4-2)、中型伺服电机(3-4-3)、减速装置(3-4-4)连接杆(3-4-5)和交叉滚子轴承(3-4-6);支撑台(3-4-2)通过支撑箱体(3-4-2-1)与箱体左室(3-4-1-1)配合与机构箱体(3-4-1)实现配合连接,中型伺服电机(3-4-3)通过箱体右室(3-4-1-2)与机构箱体(3-4-1)配合连接,减速装置(3-4-4)通过连接杆(3-4-5)与支撑台(3-4-2)配合连接,减速装置(3-4-4)通过小齿轮(3-4-4-3)与伺服电机(3-4-3)配合连接,连接杆(3-4-5)通过大齿轮(3-4-4-1)与减速装置(3-4-4)配合连接,连接杆(3-4-5)通过支撑柱(3-4-2-2)与支撑台(3-4-2)配合连接;交叉滚子轴承(3-4-6)通过上通孔(3-4-6-1-1)与左室通孔(3-4-1-1-1)配合与机构箱体(3-4-1)实现螺栓连接,机构箱体(3-4-1)设置有箱体左室(3-4-1-1)和箱体右室(3-4-1-2),支撑台(3-4-2)包括支撑箱体(3-4-2-1)、支撑柱(3-4-2-2)和下连接端(3-4-2-3),支撑箱体(3-4-2-1)通过支撑箱体通孔(3-4-2-1-1)与支撑柱(3-4-2-2)的过盈配合实现与支撑柱(3-4-2-2)的连接,减速装置(3-4-4)由大齿轮(3-4-4-1)、齿轮链条(3-4-4-2)和小齿轮(3-4-4-3)组成,大齿轮(3-4-4-1)与齿轮链条(3-4-4-2)实现齿轮—齿条配合,小齿轮(3-4-4-3)与齿轮链条(3-4-4-2)实现齿轮-齿条配合;交叉滚子轴承(3-4-6)包括上轴承圈(3-4-6-1)和下轴承圈(3-4-6-2),箱体左室(3-4-1-1)设置有左室通孔(3-4-1-1-1),支撑箱体(3-4-2-1)设置有支撑箱体通孔(3-4-2-1-1);上轴承圈(3-4-6-1)设置有上通孔(3-4-6-1-1),上通孔(3-4-6-1-1)阵列于上轴承圈(3-4-6-1)上,其中,上通孔(3-4-6-1-1)的数目为3x4,x4的取值范围是2~3,本具体实施方式中:x4=2,下轴承圈(3-4-6-2)设置有下通孔(3-4-6-2-1),下通孔(3-4-6-2-1)阵列于下轴承圈(3-4-6-2)上,其中,下通孔(3-4-6-2-1)的数目为3x5,x5的取值范围是2~3,本具体实施方式中:x5=2。
17.所述码垛夹具手(4)包括夹具箱体(4-1)、夹具部件(4-2)、夹具钉(4-3)和液压动力机构(4-4)。夹具箱体(4-1)通过下连接块通孔(4-4-2-1)与液压动力机构(4-4)螺钉连接,夹具部件(4-2)与液压动力机构(4-4)通过直杆(4-4-4)配合连接,夹具钉(4-3)与夹具部件(4-2)螺纹连接固定,并且,夹具钉(4-3)交叉地与夹具部件(4-2)固定连接,这样就能更好地达到牢固可靠的抓取目标物的目的,同时夹具钉(4-3)的数目为n,n取值范围是6~10,本具体实施方式中,n的取值是:n=8;液压动力机构(4-4)通过直杆(4-4-4)与夹具箱体(4-1)配合连接,夹具箱体(4-1)设置有夹具箱体通孔(4-1-1),液压动力机构(4-4)包括液压缸组件(4-4-1)、下连接块(4-4-2)、中间板(4-4-3)和直杆(4-4-4),液压缸组件(4-4-1)与下连接块(4-4-2)固定连接,中间板(4-4-3)与液压缸组件(4-4-1)销钉连接,直杆(4-4-4)与中间板(4-4-3)固定连接;液压缸组件(4-4-1)通过液压驱动中间板(4-4-3)运动,迫使与其固定连接的直杆(4-4-4)发生转动。
18.本发明工作流程如下:该码垛机器人的伺服电机ⅰ(1-5)与内圈(1-1-1)固定连接,交叉滚子轴承(1-1)包括内圈(1-1-1)和外圈(1-1-2),内圈(1-1-1)和外圈(1-1-2)可相对转动,在伺服电机ⅰ(1-5)的驱动下,连接组件(2)、传动组件(3)和码垛夹具手(4)可相对支撑组件(1)做旋转运动,改变码垛机器人的码垛夹具手(4)的作业位置;驱动模块(2-3)中的驱动端(2-3-3)与伺服电机ⅳ配合连接,实现驱动丝杠(2-3-1)的旋转,在伺服电机iv的作用下,驱动丝杠(2-3-1)与支撑块(2-3-2)配合连接,连接组件(2)与传动组件(3)通过连接通孔(2-2-1-1)与连接螺纹孔(3-1-2)配合实现螺钉连接,所述驱动丝杠(2-3-1)与固定螺纹(2-2-3-1)螺纹连接,使得驱动丝杠(2-3-1)旋转可以带动驱动模块(2-3)在滑动导轨(2-1-2)上做直线运动,进而带动横架(3-3)、码垛夹具手(4)实现俯仰动作;所述横架(3-3)设置有小型伺服电机(3-3-1),所述小型伺服电机(3-3-1)与曲柄(3-5)配合连接,用于驱动曲柄实现整周旋转,致使中间机构(3-4)具有更大的作业空间;所述的中型伺服电机(3-4-3)、减速装置(3-4-4)连接杆(3-4-5)和交叉滚子轴承(3-4-6)可以带动码垛夹具手(4)做回转运动,可使得码垛夹具手(4)所夹持的物品改变摆放方向;夹具部件(4-2)与液压动力机构(4-4)通过直杆(4-4-4)配合连接,夹具钉(4-3)与夹具部件(4-2)螺纹连接固定,并且,夹具钉(4-3)交叉地与夹具部件(4-2)固定连接,这样就能更好地达到牢固可靠的抓取目标物的目的。
19.以上所述仅为本发明的优选实例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡对本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1