一种剪板机下料码垛装置的制作方法
[0001]
本实用新型涉及剪板机辅助设备相关技术领域,具体涉及一种剪板机下料码垛装置。
背景技术:
[0002]
剪板机是机加工中应用比较广泛的一种剪切设备,它能剪切各种厚度的板材。剪板机是借于运动的上刀片和固定的下刀片,采用合理的刀片间隙,对各种厚度的金属板材施加剪切力,使板材按所需要的尺寸断裂分离。对于剪板机剪切后的材料,一般由人工对其进行收集并整理码垛,在此过程中消耗大量的人力物力。码垛技术是物流自动化技术领域的一门技术,就是将一件件物料按照一定的模式堆码成垛,以便于物料的搬运、储存等物流活动。目前的自动化码垛技术应用比较广泛,缺乏针对性,不能适应剪板机的物料码垛。
[0003]
针对剪板机的剪切物料的整理,设计一种即能达到机械码垛的高效率,也有针对性的机械装置。
技术实现要素:
[0004]
本实用新型目的在于解决现有技术中存在的上述技术问题,提供一种剪板机下料码垛装置,能够实现针对剪板机的高效率码垛。
[0005]
为了解决上述技术问题,本实用新型采用如下技术方案:
[0006]
一种剪板机下料码垛装置,包括接料机构、推手机构、码垛机构、机械抓手结构及监测器,所述接料机构侧边设置有推手机构,所述码垛机构设置在接料机构的出料端。
[0007]
所述码垛机构包括接料杆、放料板、第二电机、纵向导杆、支撑框及机械抓手结构;所述支撑框上部两侧安装有纵向导杆,支撑框下部两侧安装有通过第二电机驱动的纵向丝杠;所述纵向导杆上设置有上滑块,所述纵向丝杠上设置有下滑块;所述上滑块与下滑块之间连接有垂直导杆和通过第三电机驱动的垂直丝杠,所述垂直丝杠安装在垂直导杆之间;所述垂直丝杠上设置有垂直滑块,所述垂直滑块之间连接有横向导杆和横向丝杠,所述横向丝杠由第四电机驱动旋转使机械抓手结构做横向移动。
[0008]
优选的,所述接料杆均布于支撑框底部。
[0009]
优选的,所述机械抓手结构包括手臂,所述手臂固定在横向滑块上;所述横向滑块安装在横向导杆和横向丝杠上;所述手臂两端铰接有抓手,抓手气缸固定于手臂两侧面,抓手气缸通过铰接多关节连杆与抓手连接。
[0010]
优选的,所述接料结构包括传送带、凸沿、第一电机及接料结构外框;所述接料结构外框上设置有斜板,所述传送带设置于斜板末端下方,所述传送带通过设置于传送带侧边的第一电机驱动旋转;所述传送带的一侧设有凸沿。
[0011]
优选的,所述推手结构包括气缸;所述气缸上连接有推板,所述推板正对传送带上表面。
[0012]
优选的,所述机械抓手上设有监测器,所述监测器监测方向对准下方。
[0013]
本实用新型由于采用了上述技术方案,具有以下有益效果:本实用新型在剪板机工作时,能够保持高效率机械码垛,码垛过程中保证物料整齐摆放。
附图说明
[0014]
附图用来提供对本实用新型的优选的理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
[0015]
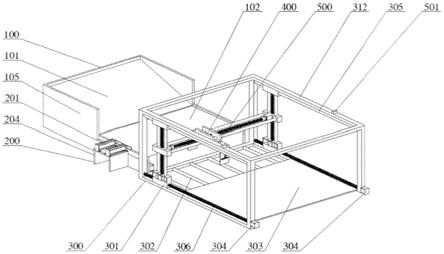
图1为本实用新型装置的整体结构示意图;
[0016]
图2为本实用新型接料结构示意图;
[0017]
图3为本实用新型码垛结构示意图;
[0018]
图4为本实用新型机械抓手结构示意图。
[0019]
图中附图标记:接料结构100、斜板101、传送带102、凸沿103、第一电机104、接料结构外框105、推手结构200、气缸201、推板 202、固定螺栓203、推手支撑架204、码垛结构300、下滑块301、接料杆302、放料板303、第二电机304、纵向导杆305、纵向丝杠 306、第三电机307、第四电机308、联轴器309、横向丝杠310、上滑块311、支撑框312、轴承座313、垂直丝杠314、垂直导杆315、机械抓手结构400、手臂401、横向滑块402、横向导杆403、垂直滑块404、抓手气缸405、连杆406、抓手407、监测器500、测距仪501。
具体实施方式
[0020]
下面结合附图详细说明本实用新型的最优实施方式。
[0021]
如图所示,为本实用新型的一种剪板机下料码垛装置,包括接料结构100、推手结构200、码垛结构300、机械抓手结构400及监测器500;接料结构100侧边设置有推手结构200,码垛结构300设置在接料结构100的出料端。
[0022]
码垛结构300包括接料杆302、放料板303、第二电机304、纵向滑杆305、支撑框312及机械抓手结构400;支撑框312上部两侧安装有纵向滑杆305,支撑框312下部两侧安装有通过第二电机304 驱动的纵向丝杠306;纵向滑杆305上设置有上滑块311,纵向丝杠上设置有下滑块301,下滑快301及上滑块311在纵向丝杠306的驱动下沿着纵向丝杠方向运动;上滑块311与下滑块301之间连接有垂直导杆315和通过第三电机307驱动的垂直丝杠314,垂直丝杠314 安装在垂直滑杆315之间;垂直丝杠314下端设置有轴承座313,轴承座313固定在下滑块301上;垂直丝杠314上设置有垂直滑块404,垂直滑块404之间连接有横向导杆403和横向丝杠310,横向丝杠310 由第四电机308驱动旋转使机械抓手结构400做横向移动;横向丝杠 310与第四电机308通过联轴器309连接,横向丝杠310及机械抓手结构400在垂直丝杠314的驱动下沿着垂直丝杠方向上下运动。
[0023]
接料杆302均布于支撑框312底部,所述支撑框312顶部两侧对称设置有测距仪501竖直对准放料板303,在码垛过程中便于测量物料在放料板303上的高度。
[0024]
机械抓手结构400包括手臂401,手臂401固定在横向滑块402 上;横向滑块402安装在横向导杆403和横向丝杠310上;手臂401 两端铰接有抓手407,抓手气缸405固定于手臂401两侧面,抓手气缸405通过铰接多关节连杆406与抓手407连接。
[0025]
接料结构100包括传送带102、凸沿103、第一电机104及接料机构外框105;接料机构外框105上设置有斜板101,传送带102设置于斜板末端下方,传送带102与斜板101不接
触。传送带102通过设置于传送带102侧边的第一电机104驱动旋转,传送带102的一侧设有凸沿103,凸沿103的上表面高于传送带102表面。
[0026]
推手结构200包括气缸201、推手支撑架204及推板202,气缸 201上连接有推板202,推板202正对传送带102上表面。气缸201 与推手支撑架204通过固定螺栓203连接。
[0027]
机械抓手结构上设有监测器500,监测器500监测方向对准下方,在码垛过程中便于定位物料的几何中心。
[0028]
本实用新型的工作方式:
[0029]
将接料结构100中斜板较高的一端置于剪板机下部,将码垛结构 300设置在接料结构100的出料端。
[0030]
工作时,物料经由剪板机处理后掉落在接料结构100的的斜板 101上,并由传送带102传送至于码垛结构300。在此过程中推手结构200将物料均推送至沿凸沿103传送,保证物料在码垛结构300的接料杆302上一端面的规整。当监测器500监测到有物料落在接料杆上时,机械抓手结构400运动至物料几何中心的正上方并下降至一定高度,利用抓手气缸405带动的抓手407将物料托起运送至放料板 303放置,在物料放置后机械抓手结构400运动至物料几何中心的正上方。
[0031]
在机械抓手结构400将物料运送至放料板303后,测距仪501对放料板上的物料高度进行测量,物料达到既定高度时机械抓手结构 400将更换放料位置。
[0032]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1