一种具有高精度的多方位升降移载机的制作方法
:
1.本实用新型涉及供料技术领域,尤其涉及一种具有高精度的多方位升降移载机。
背景技术:
2.产品在生产、组装过程中,需要涉及到各种物料,为了便于物料的中转,目前大多数的做法是将物料装入供料车内,然后将供料车移动至所需位置上。
3.待供料车移动至所需位置上后,需要将供料车内的物料进行取出以便为后续加工供料,而目前大多数的用于将供料车内的物料取出的移载装置只能进行单一方向的移载,不能适用于需要多方位移载的使用场合。
技术实现要素:
4.本实用新型的目的就是针对现有技术存在的不足而提供一种具有高精度的多方位升降移载机,能够替代人工手动的方式对物料进行移载,能够多方位地进行移载,能够适用于需要多方位移载的使用场合。
5.为了实现上述目的,本实用新型采用的技术方案是:一种具有高精度的多方位升降移载机,包括机架、沿z轴方向滑动连接于机架上的z轴滑台、用于带动z轴滑台滑动的z轴运行机构、沿x轴方向滑动连接于z轴滑台上的x轴滑座、用于带动x轴滑座滑动的x轴运行机构、沿z轴方向滑动连接于x轴滑座上的升降滑座、用于驱动升降滑座滑动的升降动力机构、沿y轴方向滑动连接于升降滑座上的伸缩叉、用于带动伸缩叉滑动的伸缩叉运行机构、设置于x轴滑座上的物料传送机构,所述升降动力机构设置于x轴滑座上,升降动力机构的输出端驱动连接升降滑座。
6.对上述方案的进一步改进为,所述z轴运行机构包括分别沿z轴方向转动连接于机架两侧上的两根z轴丝杆、用于驱动两根z轴丝杆转动的z轴动力机构、分别沿z轴方向设置于机架四角的四根z轴导杆,z轴动力机构设置于机架上,z轴动力机构的输出端驱动连接两根z轴丝杆,两根z轴丝杆分别螺纹传动连接有z轴丝杆螺母,两个z轴丝杆螺母分别与z轴滑台的两侧相连接,四根z轴导杆分别滑动连接有z轴滑套,四个z轴滑套分别与z轴滑座的四角相连接。
7.对上述方案的进一步改进为,所述x轴运行机构包括沿x轴方向转动连接于z轴滑台上的x轴丝杆、用于驱动x轴丝杆转动的x轴动力机构、分别沿x轴方向设置于z轴滑台上的两根x轴滑轨,x轴动力机构设置于z轴滑台上,x轴动力机构的输出端驱动连接x轴丝杆,两根x轴滑轨分别位于x轴丝杆的前后两端,x轴丝杆螺纹传动连接有x轴丝杆螺母,x轴丝杆螺母与x轴滑座相连接,两根x轴滑轨分别滑动连接有若干个x轴滑块,各个x轴滑块分别与x轴滑座相连接。
8.对上述方案的进一步改进为,所述伸缩叉运行机构包括沿y轴方向转动连接于升降滑座上的y轴丝杆、用于驱动y轴丝杆转动的y轴动力机构、分别沿y轴方向设置于升降滑座上的两根y轴滑轨,y轴动力机构设置于升降滑座上,y轴动力机构的输出端驱动连接y轴
丝杆,两根y轴滑轨分别位于y轴丝杆的两侧,y轴丝杆螺纹传动连接有y轴丝杆螺母,y轴丝杆螺母与伸缩叉相连接,两根y轴滑轨分别滑动连接有若干个y轴滑块,各个y轴滑块分别与伸缩叉相连接。
9.对上述方案的进一步改进为,所述物料传送机构包括第一传送模组、第二传送模组、用于为第一传送模组及第二传送模组提供动力的传送动力机构,第一传送模组、第二传送模组分别对称设置于伸缩叉的两侧。
10.对上述方案的进一步改进为,所述第一传送模组、第二传送模组均包括动力输入带轮、若干个从动带轮、传送带,传送带绕设于动力输入带轮与各个从动带轮上,传送动力机构的输出端驱动连接第一传送模组与第二传送模组中的动力输入带轮。
11.对上述方案的进一步改进为,所述传送动力机构包括电机、第一传送动力带轮、第二传送动力带轮、传送动力杆,第一传送动力带轮套接于电机的输出端上,第二传送动力带轮、第一传送模组与第二传送模组的动力输入带轮分别依次套接于传送动力杆上,第一传送动力带轮与第二传送动力带轮之间共同绕设有传送动力带,第二传送动力带轮通过传送动力带与第一传送动力带轮传动连接。
12.本实用新型有益效果在于:本实用新型提供的一种具有高精度的多方位升降移载机,包括机架、沿z轴方向滑动连接于机架上的z轴滑台、用于带动z轴滑台滑动的z轴运行机构、沿x轴方向滑动连接于z轴滑台上的x轴滑座、用于带动x轴滑座滑动的x轴运行机构、沿z轴方向滑动连接于x轴滑座上的升降滑座、用于驱动升降滑座滑动的升降动力机构、沿y轴方向滑动连接于升降滑座上的伸缩叉、用于带动伸缩叉滑动的伸缩叉运行机构、设置于x轴滑座上的物料传送机构,所述升降动力机构设置于x轴滑座上,升降动力机构的输出端驱动连接升降滑座;
13.本实用新型的伸缩叉通过z轴运行机构、x轴运行机构、伸缩叉运行机构的结合能够快速、平稳地实现x、y、z多方向移动,伸缩叉能够快速、平稳地移动至供料车内的各个位置的物料的下方,通过升降滑座及升降动力机构的结合能够使伸缩叉对物料进行抬升,从而将供料车内的各个位置的物料抬升至x轴滑座上的物料传送机构上,再通过物料传送机构对物料进行y轴方向的传送,能够替代人工手动的方式对物料进行移载,能够多方位地进行移载,能够适用于需要多方位移载的使用场合。
附图说明:
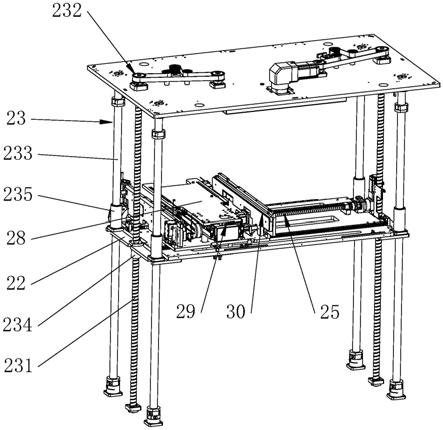
14.图1为本实用新型的结构示意图。
15.图2为本实用新型的内部结构示意图。
16.图3为本实用新型x轴运行机构的结构示意图。
17.图4为本实用新型伸缩叉运行机构的结构示意图。
18.图5为本实用新型物料传送机构的结构示意图。
19.图6为本实用新型物料传送机构另一视角的结构示意图。
20.附图标记说明:机架21、z轴滑台22、z轴运行机构23、z轴丝杆231、z轴动力机构232、z轴导杆233、z轴丝杆螺母234、z轴滑套235、x轴滑座24、x轴运行机构25、x轴丝杆251、x轴动力机构252、x轴滑轨253、x轴丝杆螺母254、x轴滑块255、升降滑座26、升降动力机构27、伸缩叉28、伸缩叉运行机构29、y轴丝杆291、y轴动力机构292、y轴滑轨293、y轴丝杆螺母
294、y轴滑块295、物料传送机构30、第一传送模组31、动力输入带轮311、从动带轮312、传送带313、第二传送模组32、传送动力机构33、电机331、第一传送动力带轮332、第二传送动力带轮333、传送动力杆334、传送动力带335。
具体实施方式:
21.下面结合附图对本实用新型作进一步的说明,如图1
‑
6所示,本实用新型包括机架21、沿z轴方向滑动连接于机架21上的z轴滑台22、用于带动z轴滑台22滑动的z轴运行机构23、沿x轴方向滑动连接于z轴滑台22上的x轴滑座24、用于带动x轴滑座24滑动的x轴运行机构25、沿z轴方向滑动连接于x轴滑座24上的升降滑座26、用于驱动升降滑座26滑动的升降动力机构27、沿y轴方向滑动连接于升降滑座26上的伸缩叉28、用于带动伸缩叉28滑动的伸缩叉运行机构29、设置于x轴滑座24上的物料传送机构30,所述升降动力机构27设置于x轴滑座24上,升降动力机构27的输出端驱动连接升降滑座26;本实用新型的伸缩叉28通过z轴运行机构23、x轴运行机构25、伸缩叉运行机构29的结合能够快速、平稳地实现x、y、z多方向移动,伸缩叉28能够快速、平稳地移动至供料车1内的各个位置的物料的下方,通过升降滑座26及升降动力机构27的结合能够使伸缩叉28对物料进行抬升,从而将供料车1内的各个位置的物料抬升至x轴滑座24上的物料传送机构30上,再通过物料传送机构30对物料进行y轴方向的传送,能够替代人工手动的方式对物料进行移载,能够多方位地进行移载,能够适用于需要多方位移载的使用场合。
22.z轴运行机构23包括分别沿z轴方向转动连接于机架21两侧上的两根z轴丝杆231、用于驱动两根z轴丝杆231转动的z轴动力机构232、分别沿z轴方向设置于机架21四角的四根z轴导杆233,z轴动力机构232设置于机架21上,z轴动力机构232的输出端驱动连接两根z轴丝杆231,两根z轴丝杆231分别螺纹传动连接有z轴丝杆螺母234,两个z轴丝杆螺母234分别与z轴滑台22的两侧相连接,四根z轴导杆233分别滑动连接有z轴滑套235,四个z轴滑套235分别与z轴滑座的四角相连接;本实用新型的z轴运行机构23能够快速、平稳地带动z轴滑台22进行升降,从而能够快速、平稳地实现伸缩叉28在z轴方向上的移动。
23.x轴运行机构25包括沿x轴方向转动连接于z轴滑台22上的x轴丝杆251、用于驱动x轴丝杆251转动的x轴动力机构252、分别沿x轴方向设置于z轴滑台22上的两根x轴滑轨253,x轴动力机构252设置于z轴滑台22上,x轴动力机构252的输出端驱动连接x轴丝杆251,两根x轴滑轨253分别位于x轴丝杆251的前后两端,x轴丝杆251螺纹传动连接有x轴丝杆螺母254,x轴丝杆螺母254与x轴滑座24相连接,两根x轴滑轨253分别滑动连接有若干个x轴滑块255,各个x轴滑块255分别与x轴滑座24相连接;本实用新型的x轴运行机构25能够快速、平稳地带动x轴滑座24进行滑动,从而能够快速、平稳地实现伸缩叉28在x轴方向上的移动。
24.伸缩叉运行机构29包括沿y轴方向转动连接于升降滑座26上的y轴丝杆291、用于驱动y轴丝杆291转动的y轴动力机构292、分别沿y轴方向设置于升降滑座26上的两根y轴滑轨293,y轴动力机构292设置于升降滑座26上,y轴动力机构292的输出端驱动连接y轴丝杆291,两根y轴滑轨293分别位于y轴丝杆291的两侧,y轴丝杆291螺纹传动连接有y轴丝杆螺母294,y轴丝杆螺母294与伸缩叉28相连接,两根y轴滑轨293分别滑动连接有若干个y轴滑块295,各个y轴滑块295分别与伸缩叉28相连接;本实用新型的伸缩叉运行机构29能够快速、平稳地带动伸缩叉28在y轴方向上移动。
25.物料传送机构30包括第一传送模组31、第二传送模组32、用于为第一传送模组31及第二传送模组32提供动力的传送动力机构33,第一传送模组31、第二传送模组32分别对称设置于伸缩叉28的两侧。
26.第一传送模组31、第二传送模组32均包括动力输入带轮311、若干个从动带轮312、传送带313,传送带313绕设于动力输入带轮311与各个从动带轮312上,传送动力机构33的输出端驱动连接第一传送模组31与第二传送模组32中的动力输入带轮311,通过第一传送模组31、第二传送模组32能够平稳地对物料进行传送。
27.传送动力机构33包括电机331、第一传送动力带轮332、第二传送动力带轮333、传送动力杆334,第一传送动力带轮332套接于电机331的输出端上,第二传送动力带轮333、第一传送模组31与第二传送模组32的动力输入带轮311分别依次套接于传送动力杆334上,第一传送动力带轮332与第二传送动力带轮333之间共同绕设有传送动力带335,第二传送动力带轮333通过传送动力带335与第一传送动力带轮332传动连接,通过电机331、第一传送动力带轮332、第二传送动力带轮333、传送动力杆334的结合能够同时为第一传送模组31及第二传送模组32提供动力。
28.工作原理:
29.本实用新型的z轴运行机构23带动伸缩叉28在z轴方向上移动,升降移载机2的x轴运行机构25带动伸缩叉28在x轴方向上移动,升降移载机2的伸缩叉运行机构29带动伸缩叉28在y轴方向上移动,伸缩叉28通过z轴运行机构23、x轴运行机构25、伸缩叉运行机构29的结合能够快速、平稳地移动至各个物料的下方,待伸缩叉28移动至待取物料的下方位置时,升降动力机构27驱动升降滑座26向上滑动即带动伸缩叉28向上抬升物料,通过物料传送机构30将抬升后的物料传送至物料传送机构30上,完成取料;通过z轴运行机构23、x轴运行机构25的结合将x轴滑座24上的物料传送机构30移动至所需放料位置的后方,再通过物料传送机构30将位于物料传送机构30上的物料向前传送至所需放料位置上,完成物料的移载;本实用新型能够替代人工手动的方式对物料进行移载,能够多方位地进行移载,能够适用于需要多方位移载的使用场合。
30.当然,以上所述仅是本实用新型的较佳实施方式,故凡依本实用新型专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本实用新型专利申请范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1