一种升降运输设备的制作方法
1.本实用新型涉及建筑运输工具,特别是一种升降运输设备。
背景技术:
2.升降运输设备用于装载物料并将物料在垂直方向上运输,但当升降运输设备将物料运输得到终点时,需要工人将运输框内的物料卸载,自动化程度低,人工成本高。
技术实现要素:
3.本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种升降运输设备。
4.本实用新型解决其问题所采用的技术方案是:
5.一种升降运输设备,包括起升机构与运输框;所述起升机构设有固定组件,所述起升机构与所述运输框传动连接;所述运输框的上端设有进料口,所述运输框的侧面设有出料口,所述运输框的底板往所述出料口的方向逐渐下倾,所述出料口设有门扇和用于驱动门扇开关所述出料口的第一驱动器,所述运输框还设有用于测量所述运输框内物料重量的称重传感器。
6.进一步,所述起升机构包括卷筒组件和用于驱动所述卷筒组件转动的第二驱动器,所述卷筒组件上绕有绳索,所述绳索的末端与所述运输框连接。
7.进一步,所述起升机构设有固定组件,所述固定组件包括固定支架,所述固定支架设有吊钩;所述卷筒组件转动连接于所述固定支架,所述第二驱动器安装在所述固定支架上。
8.进一步,所述卷筒组件包括第一卷筒和第二卷筒,所述第一卷筒与所述第二卷筒通过齿轮箱均与所述第二驱动器传动连接。
9.进一步,所述门扇与底板转动连接,所述第一驱动器驱动所述门扇相对于所述底板上下翻转。
10.进一步,所述起升机构上设有主控制器,所述主控制器与所述第二驱动器通信连接。
11.进一步,所述运输框上设有副控制器,所述副控制器与所述第一驱动器、所述称重传感器均通信连接。
12.进一步,所述主控制器与所述副控制器无线通信连接。
13.进一步,还包括用于输入起点位置与终点位置的输入设备,所述输入设备与所述主控制器无线通信连接。
14.进一步,所述输入设备为移动终端。
15.上述升降运输设备至少具有以下有益效果:在起点位置,门扇关闭,从进料口将物料放置到运输框中,启动该升降运输设备,起升机构将运输框运输至终点位置;当到达终点位置,起升机构停止工作,运输框静止,第一驱动器驱动门扇打开出料口,运输框内的物料
沿下倾的底板往出料口运动并最终从出料口卸出;当称重传感器测量得运输框内物料重量为零,起升机构将运输框运输回起点位置;重复上述过程,实现自动升降运输以及卸料,提高自动化程度。
16.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
17.下面结合附图和实例对本实用新型作进一步说明。
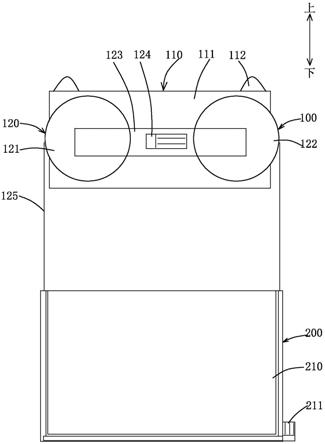
18.图1是本实用新型实施例一种升降运输设备的结构图;
19.图2是本实用新型实施例一种升降运输设备的另一结构图;
20.图3是本实用新型实施例一种升降运输设备的通信连接示意图。
具体实施方式
21.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
22.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
24.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
25.参照图1和图2,本实用新型实施例,提供了一种升降运输设备。升降运输设备包括起升机构100与运输框200;起升机构100与运输框200传动连接;运输框200的上端设有进料口221,运输框200的侧面设有出料口222,运输框200的底板223往出料口222的方向逐渐下倾,出料口222设有门扇210和用于驱动门扇210开关出料口222的第一驱动器211,运输框200还设有用于测量运输框200内物料重量的称重传感器230。
26.在该实施例中,在起点位置,门扇210关闭,从进料口221将物料放置到运输框200中,启动该升降运输设备,起升机构100将运输框200运输至终点位置;当到达终点位置,起升机构100停止工作,运输框200静止,第一驱动器211驱动门扇210打开出料口222,运输框200内的物料沿下倾的底板223往出料口222运动并最终从出料口222卸出;当称重传感器230测量得运输框200内物料重量为零,即运输框200内无物料时,起升机构100将运输框200运输回起点位置;重复上述过程,实现自动升降运输以及卸料,提高自动化程度。
27.本实用新型的某些实施例,起升机构100包括卷筒组件120和用于驱动卷筒组件120转动的第二驱动器124,卷筒组件120上绕有绳索125,绳索125的末端与运输框200连接。
28.具体地,卷筒组件120包括第一卷筒121和第二卷筒122,第一卷筒121与第二卷筒122通过齿轮箱123均与第二驱动器124传动连接。第二驱动器124转动,同时驱动第一卷筒121和第二卷筒122转动,第一卷筒121和第二卷筒122同向转动,且第一卷筒121和第二卷筒122的半径相同和转速相同。运输框200的出料口222的两侧分别与第一卷筒121的绳索125、第二卷筒122的绳索125连接,使运输框200运输平衡。
29.本实用新型的某些实施例,起升机构100设有固定组件110,固定组件110包括固定支架111,固定支架111设有吊钩112;卷筒组件120转动连接于固定支架111,第二驱动器124安装在固定支架111上。通过吊钩112将卷筒组件120挂在高处的支杆上进而将卷筒组件120固定,通过固定支架111能稳定安装第一卷筒121和第二卷筒122。
30.本实用新型的某些实施例,门扇210与底板223转动连接,第一驱动器211驱动门扇210相对于底板223上下翻转。门扇210下翻能形成滑道,延长输送距离,运输框200中的物料能沿门扇210下滑以卸载。
31.参照图3,本实用新型的某些实施例,起升机构100上设有主控制器310,主控制器310与第二驱动器124通过数据线通信连接。运输框200上设有副控制器320,副控制器320与第一驱动器211、称重传感器230均通过数据线通信连接。主控制器310与副控制器320无线通信连接。输入设备330与主控制器310无线通信连接。
32.在该实施例中,通过输入设备330输入起点位置和终点位置;主控制器310接收输入设备330发送的对应起点位置和终点位置的信号,控制第二驱动器124工作,将运输框200运输至起点位置,此时门扇210关闭,将出料口222遮挡。当工人将物料完全放到运输框200内后,再次启动,主控制器310控制第二驱动器124工作,将运输框200运输至终点位置。当运输框200到达终点位置,主控制器310控制第二驱动器124停止工作。副控制器320接收到主控制器310发送的表示运输框200到达终点位置的信号,副控制器320控制第一驱动器211工作,将门扇210打开,使运输框200内的物料从出料口222卸载。当运输框200内的物料卸载完成,称重传感器230测量得运输框200内物料重量为零,副控制器320控制第一驱动器211工作,将门扇210关闭,主控制器310接收到副控制器320发送的表示门扇210已关闭的信号,控制第二驱动器124将运输框200运输回起点位置。
33.具体地,输入设备330为移动终端。移动终端为手机、移动电脑等,便于使用者在工地的任意位置操作。
34.具体地,第一驱动器211和第二驱动器124为电机。
35.具体地,主控制器310与副控制器320通过蓝牙通信,主控制器310与输入设备330通过wifi连接。
36.以上所述,只是本实用新型的较佳实施例而已,本实用新型并不局限于上述实施方式,只要其以相同的手段达到本实用新型的技术效果,都应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1