搬送车系统的制作方法
1.本发明涉及搬送车系统。
背景技术:
2.搬送车系统应用于半导体制造工厂等。搬送车系统通过空中搬送车来搬送容纳半导体晶圆的foup或容纳标线片的标线片盒等物品,并对处理装置的装载口等移载场所进行物品的移载。在这种搬送车系统中,移载场所沿着空中搬送车所行进的轨道的延伸方向配置有多个。空中搬送车沿着轨道行进,通过在停止于与移载场所对应的位置之后使保持物品的保持部升降来进行物品相对于移载场所的移载。另外,为了提高物品的搬送效率,提出了一种将轨道铺设成上下两层、并从在各轨道行进的空中搬送车对移载场所进行物品的移载的结构(例如参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:国际公布第2017/029871号
技术实现要素:
6.在搬送车系统中,若能对相邻的移载场所同时或同时期地移载物品,则能够进一步提高物品的搬送效率。在此,当在同一轨道上从两台空中搬送车对相邻的移载场所同时移载物品时,若相邻的移载场所的配置间隔即端口间距比空中搬送车在延伸方向上的全长小,则两台空中搬送车无法同时停止于与相邻的移载场所分别对应的位置,从而无法同时或同时期地移载物品。
7.本发明的目的在于提供一种搬送车系统,即使在相邻的移载场所的端口间距比空中搬送车在延伸方向上的全长小时,空中搬送车也能够对相邻的移载场所同时或同时期地进行物品的移载。
8.本发明的方式的搬送车系统具备:第一轨道;第二轨道,该第二轨道设于第一轨道的下方,且沿与该第一轨道共通的延伸方向延伸;和空中搬送车,该空中搬送车在第一轨道及第二轨道行进,并向在延伸方向上相邻的第一移载场所及第二移载场所移载物品,在该搬送车系统中,空中搬送车具备主体部、保持物品的保持部、使保持部升降的升降驱动部、和使升降驱动部从主体部向横向移动的横向送出机构,第一移载场所与第二移载场所的配置间隔即端口间距比空中搬送车在延伸方向上的全长小,停止于第一位置的空中搬送车中的通过利用横向送出机构向横向移动的升降驱动部而升降的第一部分、与停止于第二位置的空中搬送车中的通过横向送出机构的驱动而向横向移动的第二部分在延伸方向上错开,其中,所述第一位置是在第一轨道上用于向第一移载场所移载物品的位置,所述第二位置是在第二轨道上用于向第二移载场所移载物品的位置。
9.另外,也可以是,第一部分包含被保持部保持的物品。另外,也可以是,在俯视时,第一部分收进第二部分的外缘的内侧。另外,也可以是,空中搬送车具备在横向送出机构使
升降驱动部向横向移动时一起向横向移动的附属部,附属部包含于第二部分。另外,也可以是,在延伸方向上,停止于第一位置的空中搬送车中的第二部分的范围与停止于第二位置的空中搬送车中的第二部分的范围一部分重叠。
10.发明效果
11.根据上述搬送车系统,当第一轨道的空中搬送车和第二轨道的空中搬送车对端口间距比空中搬送车在延伸方向上的全长小的第一移载场所及第二移载场所同时或同时期地移载物品时,由于在延伸方向上第一轨道的空中搬送车中的第一部分与第二轨道的空中搬送车中的第二部分错开,所以能够防止空中搬送车彼此的干涉、即第一轨道的空中搬送车的第一部分与第二轨道的空中搬送车的第二部分的干涉。其结果是,空中搬送车能够对相邻的第一移载场所及第二移载场所同时或同时期地移载物品,从而能够提高物品的搬送效率。
12.另外,在第一部分包含被保持部保持的物品的结构中,能够防止被保持部保持的物品与第二轨道的空中搬送车的第二部分干涉。另外,在当俯视时第一部分收进第二部分的外缘的内侧的结构中,由于在俯视时第一部分不会从第二部分伸出,所以空中搬送车能够对如第一轨道的空中搬送车的第二部分与第二轨道的空中搬送车的第二部分在俯视时邻接或一部分重叠那样的端口间距的第一移载场所及第二移载场所同时或同时期地移载物品。另外,在空中搬送车具备在横向送出机构使升降驱动部向横向移动时一起向横向移动的附属部、且附属部包含于第二部分的结构中,通过将向横向移动的附属部也包含在内而设定第二部分,能够可靠地防止第一轨道的空中搬送车中的第一部分与第二轨道的空中搬送车中的第二部分干涉。另外,在延伸方向上,停止于第一位置的空中搬送车中的第二部分的范围与停止于第二位置的空中搬送车中的第二部分的范围一部分重叠,在这种结构中,第一轨道的空中搬送车及第二轨道的空中搬送车能够对端口间距比第二部分的尺寸小的第一移载场所及第二移载场所同时或同时期地移载物品。
附图说明
13.图1是在y方向上观察第一实施方式的搬送车系统的一例的图。
14.图2是表示空中搬送车的一例的图。
15.图3是表示第一轨道及第二轨道与移载场所的位置关系的一例的俯视图。
16.图4是表示对移载场所移载物品的一例的图。
17.图5是表示停止于第一位置及第二位置的空中搬送车的一例的俯视图。
18.图6是在y方向上观察第二实施方式的搬送车系统的一例的图。
19.图7是表示在第二实施方式的搬送车系统中停止于第一位置及第二位置的空中搬送车的一例的图。
具体实施方式
20.以下,参照附图对实施方式进行说明。但是,本发明并不限定于该实施方式。另外,在附图中,为了说明实施方式而将一部分放大或强调进行记载等适当变更比例尺来表达。在以下各图中,使用xyz坐标系来说明图中的方向。在该xyz坐标系中,将铅垂方向作为z方向,并将水平方向作为x方向、y方向。x方向是水平方向内的一个方向,且是沿着后述的第一
轨道及第二轨道的延伸方向d。y方向是与x方向正交的方向。另外,关于x、y、z方向的各方向,适当将箭头所指方向表达为+方向(例如+x方向),并将其相反方向表达为-方向(例如-x方向)。在以下实施方式中,将空中搬送车30的行进方向作为x方向进行说明,并将横向作为y方向进行说明。需要说明的是,空中搬送车30的行进方向(x方向)是任意方向。
21.[第一实施方式]
[0022]
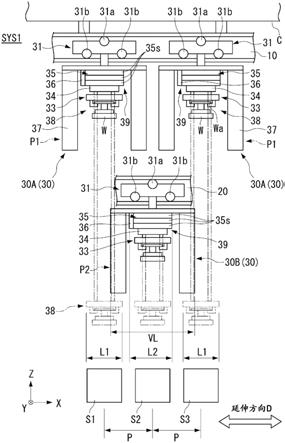
图1是在y方向上观察第一实施方式的搬送车系统sys1的一例的图。图1所示的搬送车系统sys1例如设于半导体器件的制造工厂等,对容纳有标线片等的标线片盒或容纳有用于制造半导体器件的半导体晶圆的foup等物品w进行搬送。搬送车系统sys1通过空中搬送车30在与能够载置物品w的移载场所(例如后述的第一移载场所s1等)之间搬送物品w。在本实施方式中,使用物品w为标线片盒的例子进行说明,但物品w也可以是标线片盒以外的物品。另外,搬送车系统sys1也能够应用于半导体制造领域以外的设备,物品w也可以是能够用搬送车系统sys1保管的其它物品。
[0023]
搬送车系统sys1具备第一轨道10、第二轨道20和空中搬送车30。第一轨道10及第二轨道20例如以从天花板c或设于天花板c的未图示的系统顶棚通过吊具h悬吊的状态设置,且配置于天花板c或未图示的系统顶棚的附近等。在图1中,省略了第二轨道20的吊具的记载。
[0024]
第一轨道10及第二轨道20沿着共通的延伸方向d设置。第一轨道10和第二轨道20由相同或大致相同的部件形成,且与延伸方向d正交的截面形状相同或大致相同。第二轨道20配置于第一轨道10的下方。在本实施方式中,列举第二轨道20配置于第一轨道10的正下方的结构为例进行说明,但并不限定于该结构,也可以是第二轨道20从第一轨道10的正下方向横向(y方向)错开而配置的结构。
[0025]
图2是表示空中搬送车30的一例的图。在图2中,示出了从行进方向(x方向)观察空中搬送车30的图。空中搬送车30具有行进部31和主体部32。行进部31具备未图示的行进驱动部、多个驱动轮31a及从动轮31b,并沿着第一轨道10及第二轨道20等行进。作为未图示的行进驱动部,例如可以是设于行进部31而对驱动轮31a进行驱动的电动马达,也可以是线性马达。
[0026]
主体部32经由安装部32a安装于行进部31的下部。主体部32具有:保持物品w的保持部33;悬吊保持部33并使其升降的升降驱动部34;使升降驱动部34从主体部32向轨道的侧方(横向)移动的横向送出机构35;当横向送出机构35使升降驱动部34向横向移动时一起向横向移动的附属部36;和在行进方向的前后覆盖上述的保持部33、升降驱动部34、横向送出机构35及附属部36的罩部37。
[0027]
保持部33通过从上方抓住物品w的凸缘部wa并进行保持来悬吊并保持物品w。保持部33例如是具有能够沿水平方向进退的多个爪部33m的卡盘,通过使爪部33m进入物品w的凸缘部wa的下方并使保持部33上升来悬吊并保持物品w。保持部33与线材或带等悬吊部件33n连接。保持部33从升降驱动部34悬吊,并通过升降驱动部34的驱动而升降。在本实施方式中,保持部33包含于由升降驱动部34驱动的第一部分38。另外,由于在升降驱动部34驱动(升降)保持部33时物品w被保持部33保持而与保持部33一起升降,所以被保持部33保持的物品w也包含于第一部分38。
[0028]
升降驱动部34例如为卷扬机,通过放出悬吊部件33n而使保持部33下降,并通过卷
绕悬吊部件33n而使保持部33上升。升降驱动部34由未图示的控制装置等控制以使保持部33以规定速度下降或上升。另外,升降驱动部34由控制装置等控制以将保持部33保持在目标高度。
[0029]
横向送出机构35具有例如在上下方向上重叠配置的多个可动板35s。可动板35s能够向行进部31的行进方向的侧方(与行进方向正交的方向)移动。在多个可动板35s中的设于最下侧的可动板35s上安装有升降驱动部34。主体部32具有引导横向送出机构35(可动板35s)的未图示的引导件及驱动横向送出机构35的未图示的驱动部等。
[0030]
横向送出机构35通过来自电动马达等驱动部的驱动力使升降驱动部34及保持部33沿着引导件在突出位置与收纳位置之间移动。具体而言,通过使可动板35s向侧方移动而使安装于该可动板35s的升降驱动部34向突出位置移动,通过将可动板35s向主体部32内收纳而使安装于该可动板35s的升降驱动部34向收纳位置移动。突出位置是使保持部33从主体部32向侧方突出的位置。收纳位置是在主体部32内收纳保持部33的位置。此外,也可以在横向送出机构35与升降驱动部34之间设置用于使升降驱动部34(保持部33)绕上下方向的轴旋转的旋转机构,还可以在升降驱动部34与保持部33之间设置用于使保持部33绕上下方向的轴旋转的旋转机构。
[0031]
附属部36在俯视时设于横向送出机构35的-x侧或+x侧。附属部36例如是横向送出机构35的一部分。附属部36例如是容纳缆线、管等且能够伸缩或展开的容纳部。该容纳部例如具有将筒状体彼此以能够摆动的方式连结的结构,并在该筒状体的内侧配置缆线等。这种容纳部的一端部安装于横向送出机构35的基部侧(固定侧),且以中间部分弯折的状态将另一端部安装于可动板35s。当可动板35s移动时,容纳部的弯折部分移动,从而安装于可动板35s的一侧与可动板35s一起向横向移动。
[0032]
在本实施方式中,横向送出机构35的可动板35s包含于通过横向送出机构35的驱动而向横向移动的第二部分39。另外,附属部36由于也如上述那样与可动板35s一起向横向移动,所以也包含于第二部分39。
[0033]
图3是表示第一轨道10及第二轨道20与作为移载场所的装载口lp或保管部40之间的位置关系的一例的俯视图。图4是表示对作为物品w的移载场所的装载口lp或保管部40移载物品w的一例的图。在图4中,示出了从空中搬送车30的行进方向(x方向)观察的一例。如图3所示,在本实施方式中,处理装置tl的装载口lp及保管部40的架部41分别沿直线方向(x方向)排列。多个装载口lp及架部41所排列的直线方向是第一轨道10及第二轨道20的延伸方向d。
[0034]
第一轨道10及第二轨道20分别在俯视时配置于区划间路线(区划间轨道)r1与区划间路线r2之间。第一轨道10及第二轨道20均为分别设于区划内(内部区划内)的内部区划路线。区划间路线r1等是为了将与各不相同的区划对应地设置的多个第一轨道10及第二轨道20相互连接而设置的。在本实施方式中,所谓区划(内部区划)是指例如在俯视时多个处理装置tl中的装载口lp以彼此相对的方式设置、且其间设有作业人员用通路ps的范围(区域)。第一轨道10及第二轨道20分别经由进入用或退出用的两条支线q1而相对于区划间路线r1连接,并经由进入用或退出用的两条支线q2而相对于区划间路线r2连接。
[0035]
此外,虽未图示,但也可以在区划间路线r1、r2的任一方或双方设置用于使空中搬送车30在第一轨道10与第二轨道20之间相互驶入的轨道切换部。另外,也可以在第一轨道
10及第二轨道20的一部分设置用于使空中搬送车30在第一轨道10与第二轨道20之间相互驶入的轨道切换部。即,也可以构成为在第一轨道10行进的空中搬送车30能够驶入第二轨道20、且在第二轨道20行进的空中搬送车30能够驶入第一轨道10。
[0036]
第一轨道10及第二轨道20分别具有直线部11、21和连接部12、22。直线部11、21在装载口lp的上方且侧方沿着多个装载口lp在x方向上配置。换言之,作为物品w的移载场所的多个装载口lp沿着第一轨道10及第二轨道20的延伸方向d(x方向)排列配置。此外,在图3中,为了容易说明而将第一轨道10、第二轨道20及上下的区划间路线r1、r2、支线q1、q2错开示出,但它们均在俯视时上下重叠地配置。但是,如上所述,上下重叠的第一轨道10及第二轨道20也可以在俯视时错开而配置。
[0037]
连接部12、22包含曲线部且配置于+x侧及-x侧这两端,将直线部11、21彼此连接。第一轨道10及第二轨道20通过直线部11、21及连接部12、22而成为环绕轨道。空中搬送车30能够沿着直线部11、21及连接部12、22向一个方向(例如俯视时的顺时针方向)在第一轨道10或第二轨道20环绕行进。
[0038]
空中搬送车30从区划间路线r1、r2经由支线q1、q2进入第一轨道10或第二轨道20,并从第一轨道10或第二轨道20经由支线q1、q2退出到区划间路线r1、r2。空中搬送车30沿着第一轨道10及第二轨道20移动,例如在处理装置tl的装载口lp与保管部40之间搬送物品w。
[0039]
如图3所示,多个装载口lp在俯视时配置于第一轨道10及第二轨道20的外侧。另外,多个架部41在俯视时配置于第一轨道10及第二轨道20的内侧。在图3的例子中,在一台处理装置tl中配置有三处装载口lp,但一台处理装置tl中的装载口lp的数量针对每个处理装置tl设定,例如也可以是在一台处理装置tl中配置两处或一处装载口lp的形态,还可以是在一台处理装置tl中配置四处以上装载口lp的形态。
[0040]
装载口lp及架部41从第一轨道10及第二轨道20的正下方错开而配置。空中搬送车30当在第一轨道10或第二轨道20中停止于与装载口lp或架部41对应的位置之后,如图4所示,在通过横向送出机构35将升降驱动部34横向送出到轨道侧方的状态下使保持部33升降,由此能够在与装载口lp或架部41之间进行物品w的交接。
[0041]
在本实施方式中,如图1所示,将设于一台处理装置tl的三处装载口lp中的、在延伸方向d(x方向)上相邻的装载口lp彼此分别设为第一移载场所s1及第二移载场所s2、第二移载场所s2及第一移载场所s3。在以下例子中,对设于一台处理装置tl的三处装载口lp中的、配置于x方向的两端的装载口lp分别是第一移载场所s1、s3、且配置于x方向上的中央的装载口lp是第二移载场所s2的情况进行说明。也就是说,对在三处装载口lp中从-x侧起依次排列配置有第一移载场所s1、第二移载场所s2、第一移载场所s3的例子进行说明。三处装载口lp以规定的端口间距p沿着延伸方向d(x方向)排列配置。端口间距p是第一移载场所s1与第二移载场所s2的配置间隔、第二移载场所s2与第一移载场所s3的配置间隔。端口间距p比空中搬送车30在行进方向(延伸方向d)上的全长vl(参照图1)小。此外,第一移载场所s1与第二移载场所s2的端口间距p和第二移载场所s2与第一移载场所s3的端口间距p既可以相同也可以彼此不同。
[0042]
另外,在本实施方式中,如图1所示,在对第一移载场所s1、s3移载物品w的情况下使用停止于第一轨道10的第一位置p1的空中搬送车30,在对第二移载场所s2移载物品w的情况下使用停止于第二轨道20的第二位置p2的空中搬送车30。即,第一位置p1是空中搬送
车30在第一轨道10上为了对第一移载场所s1、s3移载物品w而停止的位置。第二位置p2是空中搬送车30在第二轨道20上为了对第二移载场所s2移载物品w而停止的位置。
[0043]
图5是表示在第一实施方式的搬送车系统sys1中停止于第一位置p1及第二位置p2的空中搬送车30的一例的图。在图5中,示出了对第一移载场所s1及第二移载场所s2移载物品w的情况。以下,有时将停止于与第一移载场所s1对应的第一位置p1的空中搬送车30记载为空中搬送车30a、并将停止于第二位置p2的空中搬送车30记载为空中搬送车30b来区分说明。此外,在对空中搬送车30彼此进行区分的情况下,对于空中搬送车30的各结构也在各附图标记标注a或b来进行区分。
[0044]
如图5所示,在空中搬送车30a停止于第一位置p1、且空中搬送车30b停止于第二位置p2的情况下,空中搬送车30a的主体部32a的一部分(+x侧的部分)与空中搬送车30b的主体部32b的一部分(-x侧的部分)在俯视时成为重叠状态。即,由于第一移载场所s1与第二移载场所s2的端口间距p比延伸方向d上的空中搬送车30a、30b的全长vl小,所以第一位置p1的空中搬送车30a的一部分与第二位置p2的空中搬送车30a的一部分成为重叠状态。但是,由于第一轨道10与第二轨道20在上下方向上配置于不同的高度,所以空中搬送车30a与空中搬送车30b能够互不干涉地停止于第一位置p1及第二位置p2。
[0045]
停止于第一位置p1的空中搬送车30a通过驱动横向送出机构35a使可动板35s(参照图2)向-y方向移动,能够将升降驱动部34(图5中省略图示)包括在内而使保持部33a(物品w)配置于第一移载场所s1的正上方。此外,在图5中,用虚线表示横向送出机构35a及物品w,用实线表示保持部33a。另外,停止于第二位置p2的空中搬送车30b通过驱动横向送出机构35b使可动板35s(参照图2)向-y方向移动,能够将升降驱动部34(图5中省略图示)包括在内而使保持部33b(物品w)配置于第二移载场所s2的正上方。此外,在图5中,用实线表示横向送出机构35b,用虚线表示保持部33b及物品w。
[0046]
在本实施方式中,第一部分38a是空中搬送车30a中的通过升降驱动部34a而升降的部分,是保持部33a及被保持部33a保持的物品w。另外,第二部分39b是空中搬送车30b中的通过横向送出机构35b的驱动而向横向移动的部分,是横向送出机构35b的可动板35s(参照图2)及附属部36b。此外,第二部分39b包含保持部33b、升降驱动部34b及被保持部33b保持的物品w。
[0047]
如图5所示,停止于第一位置p1的空中搬送车30a中的通过升降驱动部34a而升降的第一部分38a、与停止于第二位置p2的空中搬送车30b中的通过横向送出机构35b的驱动而向横向移动的第二部分39b在俯视时错开,其中第一位置p1是在第一轨道10上用于向第一移载场所s1移载物品w的位置,第二位置p2是在第二轨道20上用于向第二移载场所s2移载物品w的位置。也就是说,如图5中的实线所示,停止于第一位置p1的空中搬送车30a的第一部分38a与停止于第二位置p2的空中搬送车30b的第二部分39b以在俯视时不重叠的方式在延伸方向d(行进方向、x方向)上错开。换言之,设定为:在延伸方向d上,停止于第一位置p1的空中搬送车30a的第一部分38a的一方(+x方向侧)端部与停止于第二位置p2的空中搬送车30b的第二部分39b的另一方(-x方向侧)端部相比位于另一方侧。
[0048]
因此,即使使第一部分38a从空中搬送车30a的升降驱动部34a下降,由于该第一部分38a与空中搬送车30b的第二部分39b互不干涉,所以也能够同时或同时期地进行基于第一轨道10的空中搬送车30a进行的针对第一移载场所s1的物品w的移载、和基于第二轨道20
的空中搬送车30b进行的针对第二移载场所s2的物品w的移载。
[0049]
另外,如图5所示,第一部分38a在延伸方向d上的尺寸l1比第二部分39a在延伸方向d上的尺寸l2小,在俯视时,空中搬送车30a中的第一部分38a收进第二部分39a的外缘的内侧。同样地,空中搬送车30b中的第一部分38b收进第二部分39b的外缘的内侧。通过该结构,能够在空中搬送车30a的第一部分38a与空中搬送车30b的第二部分39b互不干涉的情况下,对如空中搬送车30a、30b的第二部分39a、39b彼此在俯视时邻接或一部分重叠那样的较短端口间距p的第一移载场所s1及第二移载场所s2双方同时或同时期地移载物品w。
[0050]
另外,在如本实施方式那样物品w在延伸方向d上的尺寸wl比保持部33a在延伸方向d上的尺寸l1小、且当俯视时物品收进保持部33的外缘的内侧的情况下,保持部33a的尺寸l1成为第一部分38a在延伸方向d上的尺寸,不管保持部33a是否保持着物品w,都能够防止第一部分38a与第二部分39b的干涉。
[0051]
此外,附属部36当在通过横向送出机构35的驱动而向横向移动后、在俯视时从可动板35s等的外缘向延伸方向d的外侧露出时,包含于第二部分39。因此,例如在附属部36即使通过横向送出机构35向横向移动、在俯视时也与横向送出机构35的一部分(例如可动板35s)重叠的情况下,也可以不包含附属部36而设定第二部分39。
[0052]
另外,如图5所示,在俯视时,停止于第一位置p1的空中搬送车30a中的第二部分39a的范围与停止于第二位置p2的空中搬送车30b中的第二部分39b的范围一部分重叠。通过该结构,即使在第一移载场所s1与第二移载场所s2的端口间距p比第二部分39的尺寸l2小的情况下,也能够在第一部分38a与b的第二部分39b互不干涉的情况下同时或同时期地进行基于第一轨道10的空中搬送车30a的针对第一移载场所s1的物品w的移载、和基于第二轨道20的空中搬送车30b的针对第二移载场所s2的物品w的移载。
[0053]
接着,对上述搬送车系统sys1的动作进行说明。首先,对将保管部40的物品w向装载口lp交付物品的动作进行说明。搬送车系统sys1的动作由未图示的控制装置控制。未图示的控制装置对在第一轨道10或第二轨道20行进的空中搬送车30进行控制,以从保管部40收取物品w。通过该控制,空中搬送车30沿着第一轨道10或第二轨道20行进,移动到保管部40的架部41的上方且侧方而停止,驱动横向送出机构35使升降驱动部34横向送出,通过升降驱动部34使保持部33下降并通过保持部33收取物品w。之后,空中搬送车30通过升降驱动部34使保持部33上升,并驱动横向送出机构35使升降驱动部34(保持部33)返回至收纳位置,由此,物品w被容纳到主体部32内。
[0054]
接着,未图示的控制装置对空中搬送车30进行控制,以向装载口lp交付物品w。通过该控制,空中搬送车30在由保持部33保持着物品w的状态下沿着第一轨道10或第二轨道20行进,移动到装载口lp的上方且侧方而停止,驱动横向送出机构35使升降驱动部34横向送出,并使保持部33(物品w)配置于装载口lp的正上方。接着,在驱动升降驱动部34使保持部33及物品w下降并使物品w载置到装载口lp之后,解除保持部33对物品w的保持,由此,物品w被交付到装载口lp。
[0055]
在这样的动作中,有时以如下方式进行控制:在第一轨道10行进的空中搬送车30a与在第二轨道20行进的空中搬送车30b向作为相邻的装载口lp的第一移载场所s1及第二移载场所s2同时或大致同时交付物品w。在该情况下,在第一轨道10行进的空中搬送车30a在能够向第一移载场所s1移载物品w的第一位置p1停止。另外,在第二轨道20行进的空中搬送
车30b在能够向第二移载场所s2移载物品w的第二位置p2停止。
[0056]
接着,空中搬送车30a、30b分别驱动横向送出机构35a、35b使升降驱动部34a、34b横向送出。此时,空中搬送车30a中的第二部分39a的范围与空中搬送车30b中的第二部分39b的范围一部分重叠这点如上所述(参照图5)。在该状态下,通过升降驱动部34a、34b使保持部33(物品w)下降。此时,由于空中搬送车30a中的第一部分38a与空中搬送车30b的第二部分39b在俯视时错开,所以能够在第一部分38a与第二部分39b互不干涉的情况下从空中搬送车30a、30b双方同时或同时期地向相邻的第一移载场所s1及第二移载场所s2分别载置物品w。
[0057]
此外,以上对向第一移载场所s1及第二移载场所s2双方载置物品w的情况进行了说明,但关于从第一移载场所s1及第二移载场所s2双方分别收取物品w的情况,同样也能够在第一部分38a与第二部分39b互不干涉的情况下由空中搬送车30a、30b双方同时或同时期地从相邻的第一移载场所s1及第二移载场所s2收取物品w。
[0058]
另外,关于向第一移载场所s1及第二移载场所s2中的一方载置物品w并从另一方收取物品w的情况,同样也能够在第一部分38a与第二部分39b互不干涉的情况下同时或同时期地、例如与空中搬送车30a向第一移载场所s1载置物品w同时或同时期地由空中搬送车30b从第二移载场所s2收取物品w。
[0059]
另外,上述的同时包括空中搬送车30a、30b停止而物品w的移载动作的开始时机及结束时机中的一方或双方一致的情况。另外,上述的同时期包括基于空中搬送车30a进行的物品w的移载动作所需的时间与基于空中搬送车30b进行的物品w的移载动作所需的时间至少一部分重复的情况。例如,如图1所示,在第一移载场所s1与第二移载场所s2为相同高度的情况下,由于空中搬送车30a停止于比空中搬送车30b高的位置,所以基于空中搬送车30a进行的物品w的移载动作所需的时间比基于空中搬送车30b进行的物品w的移载动作所需的时间长。上述的同时期也包括基于空中搬送车30b进行的物品w的移载动作在基于空中搬送车30a进行的物品w的移载动作所需的时间内结束的情况。
[0060]
如上所述,根据搬送车系统sys1,即使在第一轨道10的空中搬送车30a和第二轨道20的空中搬送车30b对端口间距p比空中搬送车30在延伸方向d上的全长vl小的第一移载场所s1及第二移载场所s2同时或同时期地移载物品w的情况下,由于在俯视时第一部分38a与第二部分39b错开,所以也能够防止空中搬送车30彼此的干涉、即第一部分38a与第二部分39b的干涉。其结果是,能够对相邻的第一移载场所s1及第二移载场所s2同时或同时期地移载物品w,从而能够提高物品w的搬送效率。
[0061]
此外,在图5中说明了对第一移载场所s1及第二移载场所s2移载物品w的情况,但关于对第二移载场所s2及第一移载场所s3移载物品w的情况也能够与上述同样地进行说明。即,停止于与第一移载场所s3对应的第一位置p1的空中搬送车30a和停止于第二位置p2的空中搬送车30b能够对相邻的第二移载场所s2及第一移载场所s3同时或同时期地移载物品w。
[0062]
另外,如图1所示,三台空中搬送车30能够对第一移载场所s1、s3及第二移载场所s2这三处移载场所同时或同时期地移载物品w。此外,在图1的示例中,停止于第一轨道10(上侧的轨道)的两台空中搬送车30a对两处第一移载场所s1、s3分别进行物品w的移载,停止于第二轨道20(下侧的轨道)的一台空中搬送车30b对一处第二移载场所s2进行物品w的
移载,但并不限定于该形态。例如,与图1相反地,也可以是如下形态:在三处装载口lp中的两侧的两处为第二移载场所s2、中央的一处为第一移载场所s1的情况下,停止于第二轨道20的两台空中搬送车30b对两处第二移载场所s2分别进行物品w的移载,停止于第一轨道10的一台空中搬送车30a对一处第一移载场所s1进行物品w的移载。
[0063]
[第二实施方式]
[0064]
图6是在y方向上观察第二实施方式的搬送车系统sys2的一例的图。图6所示的搬送车系统sys2例如对容纳有用于制造半导体器件的半导体晶圆的foup等物品f进行搬送。物品f比第一实施方式的物品w(标线片盒)大,且在俯视时比保持部33大。
[0065]
另外,移载物品f的第一移载场所s1及第二移载场所s2在延伸方向d上的尺寸与物品f相对应地变大,比第一实施方式的第一移载场所s1及第二移载场所s2大。此外,关于其它结构,与第一实施方式相同。另外,第一移载场所s1与第二移载场所s2的间隔即端口间距p与第一实施方式同样地示出,但也可以根据物品f的大小或根据处理装置tl的设定而改变。另外,由于第一位置p1及第二位置p2根据第一移载场所s1及第二移载场所s2而设定,所以若端口间距p改变(即,若第一移载场所s1及第二移载场所s2的位置改变),则第一位置p1及第二位置p2根据该第一移载场所s1及第二移载场所s2而改变。
[0066]
图7是表示在第二实施方式的搬送车系统sys2中停止于第一位置p1及第二位置p2的空中搬送车30的一例的图。在本实施方式中,当俯视时,由于物品f在延伸方向d上的尺寸fl比保持部33在延伸方向d上的尺寸大,所以在俯视时的延伸方向d上被保持部33保持的物品w的外缘伸出到保持部33的外缘的外侧。因此,在本实施方式中,第一部分38在延伸方向d上的尺寸l11与物品f在延伸方向d上的尺寸fl相同。
[0067]
如图7所示,停止于第一位置p1的空中搬送车30a中的通过升降驱动部34a升降的第一部分38a、与停止于第二位置p2的空中搬送车30b中的通过横向送出机构35b的驱动而向横向移动的第二部分39b在俯视时错开,其中第一位置p1是在第一轨道10上用于向第一移载场所s1移载物品f的位置,第二位置p2是在第二轨道20上用于向第二移载场所s2移载物品f的位置。
[0068]
在本实施方式中,第一部分38a与第一实施方式同样地是保持部33a及被保持部33a保持的物品w。另外,第二部分39b与第一实施方式同样地是横向送出机构35b的可动板35s(参照图2)及附属部36b。在图7中,用虚线表示空中搬送车30a中的横向送出机构35a,用实线表示保持部33a及物品w,用实线表示空中搬送车30b中的横向送出机构35b,并用虚线表示保持部33b及物品w。
[0069]
与第一实施方式同样地,停止于第一位置p1的空中搬送车30a的第一部分38a与停止于第二位置p2的空中搬送车30b的第二部分39b以在俯视时不重叠的方式在延伸方向d(x方向)上错开。因此,在通过空中搬送车30a的升降驱动部34a使第一部分38a下降的情况下,能够在与空中搬送车30b的第二部分39b互不干涉的情况下由第一轨道10的空中搬送车30a和第二轨道20的空中搬送车30b同时或同时期地移载物品w。
[0070]
此外,第一部分38a在延伸方向d上的尺寸l11比第二部分39a在延伸方向d上的尺寸l2小、且在俯视时第一部分38a收进第二部分39a的外缘的内侧这点与第一实施方式相同。
[0071]
这样,在搬送车系统sys2中,即使在物品f在延伸方向d上的尺寸fl比保持部33在
延伸方向d上的尺寸大的情况下,也包含物品f在内而设为第一部分38a,且在俯视时第一部分38a与第二部分39b成为错开的状态。其结果是,能够防止空中搬送车30彼此的干涉、即第一轨道10的空中搬送车30a的第一部分38a与第二轨道20的空中搬送车30b的第二部分39b的干涉,能够从空中搬送车30a及空中搬送车30b双方对相邻的第一移载场所s1及第二移载场所s2同时或同时期地移载物品f,因此,能够提高物品f的搬送效率。
[0072]
以上,对实施方式进行了说明,但本发明并不限定于上述说明,在不脱离本发明的要旨的范围内能够进行各种变更。另外,在法律允许的范围内,援引日本专利申请特愿2019
‑
055601及上述实施方式等中引用的所有文献的公开内容作为本文记载的一部分。例如,在上述搬送车系统sys1、sys2中,作为第一移载场所s1及第二移载场所s2而列举装载口lp为例进行了说明,但并不限定于该结构。作为第一移载场所s1及第二移载场所s2,对于保管部40的架部41能够应用相同的说明。
[0073]
例如,如图3所示,关于保管部40中在延伸方向d上相邻的架部41分别为第一移载场所和第二移载场所、且作为其间隔的端口间距p比空中搬送车30的全长vl小的情况,也是上述装载口lp中的第一移载场所s1及第二移载场所s2。即,能够从第一轨道10的空中搬送车30a及第二轨道20的空中搬送车30b双方同时或同时期地对相邻的架部41分别移载物品f。
[0074]
附图标记说明
[0075]
d:延伸方向
[0076]
f、w:物品
[0077]
p:端口间距
[0078]
p1:第一位置
[0079]
p2:第二位置
[0080]
s1、s3:第一移载场所
[0081]
s2:第二移载场所
[0082]
sys1、sys2:搬送车系统
[0083]
10:第一轨道
[0084]
20:第二轨道
[0085]
30、30a、30b:空中搬送车
[0086]
31:行进部
[0087]
32:主体部
[0088]
33:保持部
[0089]
34:升降驱动部
[0090]
35:横向送出机构
[0091]
36:附属部
[0092]
38、38a、38b:第一部分
[0093]
39、39a、39b:第二部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1