电梯设备的制作方法
1.本发明涉及具有位置检测装置的电梯设备。
背景技术:
2.在电梯设备中,层站门与轿厢门联动地开闭。此时,为了检测能够开门的位置,使用位置检测装置。该位置检测装置由在井道内设置的被检测体、和在轿厢中设置的检测被检测体的位置检测器(传感器)构成。例如,作为位置检测装置,使用光电式传感器和遮光板。
3.这样的位置检测装置,被应用于防止轿厢在开门状态下从可开门位置移动的安全装置。
4.作为关于这样的位置检测装置的现有技术,已知专利文献1和2中记载的技术。
5.专利文献1中记载的技术中,在层站一侧的门的地坎的下部安装形成了模块化的磁体,用在轿厢下方配置的传感器检测能够进行门的开闭的位置。
6.专利文献2中记载的技术中,在检测各楼层中设置的被检测体的位置检测器发生了故障的情况下,使用在限速器机构中设置的脉冲发生器(限速器编码器)检测可开门位置。
7.现有技术文献
8.专利文献
9.专利文献1:日本特开平11
‑
246139号公报
10.专利文献2:国际公开第2017/168619号
技术实现要素:
11.发明要解决的课题
12.但是,专利文献1中记载的技术中,位置检测装置中发生异常时,不能检测可开门位置,电梯的运转控制的可靠性降低,轿厢难以继续运转。
13.另外,专利文献2中记载的技术中,位置检测器发生了故障的情况下,代替位置检测器地使用脉冲发生器,但脉冲发生器中产生位置检测误差时,检出的可开门位置的可靠性降低。
14.于是,本发明提供一种具有能够高可靠性地检测可开门位置的位置检测装置的电梯设备。
15.用于解决课题的技术方案
16.为了解决上述课题,本发明的电梯设备包括:检测轿厢在井道内的位置的位置检测装置;控制轿厢的运转的电梯控制器;和独立于电梯控制器的安全控制器,其基于位置检测装置的输出来输出表示是否是可开门位置的信号,该可开门位置用于电梯控制器进行的控制,位置检测装置包括:第一位置检测部,其具有设置在井道内的与楼层地面位置对应的位置的第一被检测体和检测第一被检测体的第一位置检测器;和检测轿厢在井道内的绝对
位置的第二位置检测部,安全控制器包括:保存可开门位置的数据的数据库;异常判断部,其基于第二位置检测部的输出来判断第二位置检测部有无异常;和可开门位置输出部,其在异常判断部判断为无异常的情况下,判断第二位置检测部的输出是否在可开门位置的所述数据的范围内,并基于判断结果来输出表示是否是可开门位置的信号,在异常判断部判断为有异常的情况下,输出第一位置检测部的输出信号,作为表示是否是可开门位置的信号。
17.发明效果
18.根据本发明,能够高可靠性地检测可开门位置。
附图说明
19.图1是一个实施方式的电梯设备的整体结构图。
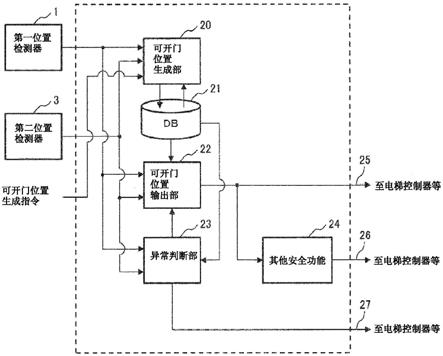
20.图2是表示实施方式中的安全控制器的功能结构的框图。
21.图3是表示测定运转时的第一位置检测器的输出信号的一例的时序图。
22.图4是表示第一位置检测器和第二位置检测器的输出信号的一例的时序图。
23.图5是db21(数据库)的结构图。
24.图6是表示可开门位置生成部执行的db生成处理的流程图。
25.图7是表示可开门位置生成部执行的可开门位置的设定处理的流程图。
26.图8是表示异常判断部执行的第二位置检测器的异常判断处理的流程图。
27.图9是表示楼层地面位置的测定结果的经时变化的一例的图。
具体实施方式
28.以下,对于本发明的实施方式,使用附图进行说明。各图中,参考编号相同的部分示出了同一构成要件或具备类似功能的构成要件。
29.图1是本发明的一个实施方式的电梯设备的整体结构图。
30.如图1所示,在建筑物中的井道的上部设置有绳轮104和导向轮105。在该绳轮104和导向轮105上卷绕有主绳缆101。对于主绳缆101的一端和另一端,分别连接轿厢100和对重113。用这样的主绳缆101将轿厢100和对重113悬吊在井道内。
31.用由电力转换器108供电的电动机106对绳轮104进行旋转驱动时,主绳缆101被直线地驱动。由此,轿厢100和对重113在井道内,相互在上下相反方向上升降。该情况下,轿厢100在井道内在多个楼层之间移动。轿厢100在目的楼层停靠并停止时,在轿厢100中设置的轿厢门112与在层站115设置的层站门111机械地卡合。由此,用轿厢100中设置的门驱动装置(未图示)对轿厢门112和层站门111一同进行开闭驱动。
32.另外,脉冲发生器107安装在电动机106中。脉冲发生器107与电动机106的旋转相应地发生脉冲信号。另外,作为脉冲发生器107,例如能够应用旋转编码器或同步分解器等。脉冲发生器107输出的脉冲信号被输入电梯控制器109。电梯控制器109通过对脉冲信号进行计数来计算电动机106的速度、轿厢100在井道内移动方向上的等价的位置和移动距离等。
33.此处,“等价的位置和移动距离”指的是根据脉冲发生器107输出的脉冲信号的计数值所表示的电动机106的旋转位移量求出的轿厢在上下方向上的位置和移动距离。
34.在轿厢100上,在轿厢100的升降方向上与轿厢100隔开规定距离地设置了第一位置检测器1。在井道内,与各楼层的可开门位置对应地设置了由第一位置检测器1检测的被检测体2。从而,轿厢100位于可开门位置时,被检测体2被第一位置检测器1检测出。
35.此处,作为第一位置检测器1,能够应用光电式传感器、磁传感器、高频磁场式传感器等。另外,与使用的传感器相应地,应用各种被检测体2(例如遮板(光、磁))。
36.第一位置检测器1的输出信号被输入至安全控制器110。安全控制器110是构成电梯的安全系统的控制器,与电梯控制器109独立地控制通过制动动作和电源切断进行的轿厢100的制动。安全控制器110以执行处理的cpu(central processing unit:中央处理器)为主要的构成要素,此外具有检测cpu的异常用的看门狗计时器和监视电源异常的电路。另外,也可以使cpu双重化,通过cpu相互比较处理动作而检测cpu的处理异常。
37.在轿厢100上,进而在轿厢100的升降方向上与轿厢100隔开规定距离地设置了第二位置检测器3。第二位置检测器3的输出信号被输入至安全控制器110。另外,在井道内,悬吊了由第二位置检测器3检测的长形状(带状、绳状、丝带状、细长的棒状等)的被检测体4。
38.长形的被检测体4沿着其较长方向,具有在井道内的上下方向上的绝对位置信息、例如从基准楼层起的高度信息。该绝对位置信息通过沿着被检测体4的长度方向,使电磁特性、光学特性、机械形状和性质、表面的几何图案形状等不同而对于被检测体4连续地设定。对此,作为检测对被检测体4设定的绝对位置信息的第二位置检测器3,应用磁传感器、磁致伸缩传感器、光学传感器、图像传感器等。
39.被检测体4使其较长方向沿着井道内的高度方向地,从井道内的顶部延伸至底部。而且,对于被检测体4,在从位于井道内的顶部的部位到位于井道内的底部的部位及其之间的部分,连续地设定了绝对位置信息。由此,在轿厢100可移动的范围内能够连续地检出轿厢100的绝对位置(例如轿厢100从基准楼层起的位置的高度)。
40.作为检测轿厢在井道内的绝对位置的方案,在此之外,能够应用在具备限速器绳缆的限速器上设置的旋转编码器、在井道内悬架的齿形带和带有齿轮的绝对编码器、用井道内的摄像机图像进行的位置检测等。
41.图2是表示本实施方式中的安全控制器的功能结构的框图。图中,虚线部内相当于安全控制器110(图1)。另外,本实施方式中,cpu通过执行规定程序来实现各部的功能。
42.以下,也参考其他附图(图3-8),对于安全控制器110的功能进行说明。
43.图2所示的可开门位置生成部20基于第一位置检测器1和第二位置检测器的各输出信号,按从井道下部的基准面起的绝对位置生成在井道内轿厢100能够开门的位置(以下记作“可开门位置”)的数据,将生成的可开门位置保存在db(数据库)21中。
44.这样的db21在电梯的安装完成时、因地震等而发生了被检测体2(图1)的偏移的情况、随着建筑物的经年变化而在被检测体2与建筑物地面之间产生了位置偏差等情况下生成。此时,用电梯运转控制系统(未图示)执行生成db21用的位置测定用运转(以下记作“测定运转”)。另外,安全控制器110从电梯运转控制系统一方接收指示生成db21用的可开门位置生成指令时,执行生成db21的处理。该测定运转是使轿厢100移动至最下层之后,以低于额定速度的规定速度,从最下层移动至最上层。
45.图3是表示测定运转时的第一位置检测器1的输出信号的一例的时序图。
46.第一位置检测器1检测出被检测体2时,输出信号成为on状态。从而,处于on状态的
期间表示轿厢100的位置是可开门位置。本实施方式中,在第一位置检测器1的输出信号是on状态的期间(以下记作“on期间”)的中心的时刻(图中前后的时间宽度同为a的时刻),轿厢地面与层站地面一致。这样的输出信号,例如在被检测体2是遮光板或磁屏蔽板的情况下,能够通过使遮板的高度与可开门位置的范围对应、使遮板的高度方向的中心与停靠位置对应地设置遮板而得到。
47.另外,测定运转在位置测定中以恒定速度执行,所以第一位置检测器1的输出信号波形在各楼层处,是相对于轿厢地面与层站地面的位置一致的时刻对称的。
48.接着,说明可开门位置生成部20中的、使用第一位置检测器1和第二位置检测器3的输出信号生成db21的处理的概要。
49.图4是表示第一位置检测器1和第二位置检测器3的输出信号的一例的时序图。
50.安全控制器110的可开门位置生成部20检测出第一位置检测器1的输出信号的on边沿(第一位置检测器1开始被检测体2的检出的时刻)时,存储该时刻的第二位置检测器3的输出值(图4中的“a”)。之后,可开门位置生成部20检测出第一位置检测器1的输出信号的off边沿(第一位置检测器1结束被检测体2的检出的时刻)时,存储该时刻的第二位置检测器3的输出值(图4中的“b”)。
51.如图3所示,第一位置检测器1的输出信号的on期间的中心是轿厢地面与层站地面一致的时刻,所以可开门位置生成部20计算(a+b)/2作为轿厢地面与层站地面一致的位置(以下称为“楼层地面位置”)。然后,可开门位置生成部20以楼层地面位置((a+b)/2)为基准,在轿厢的升降方向上设定可开门位置的幅度c。即,可开门位置生成部20计算出(a+b)/2
±
c,将它们作为可开门位置的上限和下限,由此以楼层地面位置为中心设定长度2c的可开门位置。另外,宽度c预先由安全控制器110存储。
52.可开门位置生成部20在各楼层进行上述这样的处理,对于从最下层到最上层的各楼层,生成可开门位置的db21。
53.图5是db21的结构图。另外,db21被存储在安全控制器110所具有的未图示的存储装置中。
54.db21包括楼层、在各楼层根据第二位置检测器3的输出值(a,b,
……
)计算出的第一位置检测器1的中心位置(上述楼层地面位置)、以及对该中心位置加减可开门位置的幅度(α、β)得到的可开门位置的上限和下限的数据。另外,db21也可以与这些数据一同包括各楼层处的第二位置检测器3的输出值(a,b,
……
)。
55.另外,可开门的幅度可以如图5所示地,根据楼层而变更。
56.图2所示的可开门位置输出部22基于db21和如后所述地判断第二位置检测器3是否有异常的异常判断部23的判断结果输出,决定可开门位置并将其输出至电梯控制器109(图1)等。可开门位置输出部22在异常判断部23的判断结果并非“异常”的情况下,参照db21输出可开门位置。另外,可开门位置输出部22在异常判断部23的判断结果是“异常”的情况下,输出第一位置检测器1的输出信号,作为表示可开门位置的数据。此时,因为第二位置检测器3是异常的,所以电梯控制器109(图1)使用第一位置检测器1的输出信号,执行缩退运转。
57.此处,缩退运转指的是与通常(服务运转时)相比降低速度地进行运转、与通常(服务运转时)相比限制楼层范围地进行运转、移动至最近的楼层等。
58.异常判断部23在通常运转中(服务运转中),在根据第一位置检测器1的输出信号的on边沿和off边沿的各时刻时的第二位置检测器3的输出值计算出的楼层地面位置、与db21中保存的楼层地面位置数据的差的大小超过了容许值的情况下,判断为第二位置检测器3是异常的。然后,异常判断部23将“异常”作为判断结果输出至可开门位置输出部22。
59.另外,差分的容许值越小,则异常的检测灵敏度越高且越能够早期检出,但是缩退动作的次数增加,容许值越大,则异常的检测灵敏度越低,但是缩退动作的次数减少。从而,对于差分的容许值,同时考虑检测灵敏度和缩退动作的频度地适当设定。
60.这样的差随着地震引起的被检测体2的位置偏移、伴随建筑物的经年变化产生的被检测体2与建筑物地面之间的位置偏差、和第二位置检测器3依赖于井道内的温度和湿度的被检测体4的伸缩等而发生。因此,能够基于差的大小,检测出位置检测单元的异常。
61.接着,对于可开门位置生成部20执行的db生成处理进行说明。
62.图6是表示可开门位置生成部执行的db生成处理的流程图。另外,以下说明中只要没有特别指出,执行各处理的主体就是可开门位置生成部20(图2)。
63.首先,在步骤300中,判断来自外部(电梯运转控制系统)的可开门位置生成指令是否on。可开门位置生成指令是off的情况(步骤300的“否”(no))下,结束db生成处理(步骤301)。
64.可开门位置生成指令是on的情况(步骤300的“是”(yes))下,在步骤302中,判断第一位置检测器1的输出是否on。第一位置检测器1的输出是off的情况(步骤302的“否”)下,在步骤303中,判断为轿厢100的位置并非初始位置(测定运转开始位置),对外部(电梯运转控制系统)输出异常之后,结束db生成处理(步骤304)。
65.此处,本实施方式中,在测定运转中,电梯运转控制系统将轿厢100的初始位置设为最下层(停靠位置),使轿厢100向最上层行驶。另外,电梯运转控制系统也可以将初始位置设为最上层,使轿厢100向最下层行驶。
66.第一位置检测器1的输出是on的情况(步骤302的“是”)下,在步骤305中,将第二位置检测器3的输出值作为最下层的楼层地面位置保存至db21。
67.接着,在步骤306中,等待至第一位置检测器1成为off(等待执行db生成处理)。
68.进而,在步骤307中,等待至第一位置检测器1的输出再次成为on、即检测出下一个可开门位置。
69.第一位置检测器1的输出再次成为on时(步骤307的“是”),在步骤308中,存储第二位置检测器3的输出值,接着在步骤309中,等待至第一位置检测器1的输出成为off。在成为off的时机(步骤309的“是”),在步骤310中,再次存储第二位置检测器3的输出值。
70.接着,根据存储的第二位置检测器3的输出值,在步骤311中,运算可开门位置的范围的中心(图5中的“中心”)即楼层地面位置,并将运算得到的楼层地面位置保存至db21。另外,通过对运算得到的楼层地面位置加减可开门位置的幅度的规定值(图5中的α、β),而运算可开门位置的范围的上限和下限,并保存至db21。
71.之后,在步骤312中,使楼层n增加1个楼层。即,设定下一个db21生成对象楼层。接着,在步骤313中,判断来自外部的可开门位置生成指令是否off,并非off的情况(步骤313的“否”)下,反复执行上述处理。是off的情况(步骤313的“是”)下,在步骤314中,将第二位置检测器3的输出值作为最上层的楼层地面位置保存至db21,之后结束处理(步骤315)。
72.本实施方式中,可开门位置生成指令成为off的时机,是通过电梯运转控制系统、轿厢100移动至最上层、轿厢100在最上层停靠并停止的时刻。
73.接着,对于可开门位置输出部22(图2)设定用于控制的可开门位置的处理进行说明。
74.图7是表示可开门位置生成部执行的可开门位置的设定处理的流程图。另外,以下说明中只要没有特别指出,执行各处理的主体就是可开门位置输出部22(图2)。
75.首先,在步骤400中,判断是否收到来自异常判断部23的异常通知(判断结果输出)。收到异常通知的情况(步骤400的“是”)下,在步骤401中,将第一位置检测器1的输出作为可开门位置输出,接着,在步骤402中输出表示第二位置检测器3发生了故障的通知。电梯控制器109(图1)接受第二位置检测器3发生了故障的通知时,执行缩退运转。
76.本实施方式中,电梯控制器109通常使用由第二位置检测器3检出的可开门位置执行轿厢的运转控制,但在检测出第二位置检测器3的异常的情况下,使用第一位置检测器1检测可开门位置,由此虽然是缩退运转,但是能够继续进行轿厢100的运转。
77.未收到来自异常判断部23的异常通知的情况(步骤400的“否”)下,在步骤404中,判断第二位置检测器3的输出是否在db21的可开门位置的范围内(图5中的“上限”与“下限”之间),如果第二位置检测器3的输出在可开门位置的范围内(步骤“404”的是),则将可开门位置设为on(能够开门)并输出(步骤405)。另外,如果第二位置检测器3的输出在可开门位置的范围外(步骤404的“否”),则将可开门位置设为off(不能开门)并输出(步骤406)。
78.要使移动中的轿厢100停靠在楼层地面位置的情况下,根据上述步骤405,轿厢100在井道内移动并到达可开门位置的范围内的上限(向下方移动的情况下)或下限(向上方移动的情况下)时,可开门位置输出部22输出表示能够开门的on信号。电梯控制器109接收该on信号时,获取本控制器或安全控制器110的存储装置中保存的各楼层的可开门位置的幅度(相当于图5的α、β)的数据,获知到停靠位置(=楼层地面位置)的剩余距离(=可开门位置的幅度)。电梯控制器109与该剩余距离相应地使轿厢100减速而在楼层地面位置停靠并停止。
79.另外,要使移动中的轿厢100在楼层地面位置停靠的情况下,根据上述步骤401,轿厢100在井道内移动并到达可开门位置的范围内的上限(向下方移动的情况下)或下限(向上方移动的情况下)时,可开门位置输出部22的输出、即第一位置检测器1的输出信号(参考图3)从off状态(不能开门)转移至on状态(能够开门)。接收这样的输出信号on边沿时,因为被检测体2的尺寸是与可开门位置的幅度相应地预先设定的,所以电梯控制器109能够得知到停靠位置的剩余距离(=可开门位置的幅度)。另外,电梯控制器109也可以通过获取本控制器的存储装置中保存的各楼层的可开门位置的幅度的数据而得知剩余距离。电梯控制器109与该剩余距离相应地使轿厢100减速而在楼层地面位置停靠并停止。
80.接着,对于异常判断部23执行的第二位置检测器的异常判断处理进行说明。
81.图8是表示异常判断部执行的第二位置检测器的异常判断处理的流程图。另外,以下说明中只要没有特别指出,执行各处理的主体就是异常判断部23(图2)。
82.首先,在步骤500中,判断是否检测出第一位置检测器1的输出的on边沿,未检测出on边沿的情况(步骤500的“否”)下,结束处理(步骤506)。
83.检测出第一位置检测器1的输出的on边沿的情况(步骤500的“是”)下,在步骤501
中存储第二位置检测器3的输出即位置a'。接着,在步骤502中,等待至检测出第一位置检测器1的输出的off边沿。
84.检测出第一位置检测器的输出的off边沿的情况(步骤502的“是”)下,在步骤503中,存储第二位置检测器3的输出即位置b'。
85.接着,在步骤504中,对于已测定的在db21中保存的楼层地面位置(a+b)/2、与本次测定的楼层地面位置(a'+b')/2进行比较。即,判断(a+b)/2与(a'+b')/2的差的大小是否大于规定的容许值δ,上述差大于设定值δ的情况(步骤504的“是”)下,对可开门位置输出部22输出第二位置检测器3的异常通知(判断结果输出)(步骤505)。
86.另外,在步骤504中,也可以累积每次的楼层地面位置的测定结果,基于楼层地面位置的变化的倾向,判断第二位置检测器3的异常,或预测异常发生的时期。于是,对于预测异常发生的方法进行说明。
87.图9是表示楼层地面位置的测定结果的经时变化的一例的图。该例是对于某一楼层中的楼层地面位置的测定结果按时间顺序作图得到的结果。其中,图9中,纵轴表示楼层地面位置,横轴表示时间。
88.异常判断部23包括初始测定的楼层地面位置(a+b)/2地,每当轿厢100经过该楼层时都测定楼层地面位置并累积在未图示的存储装置中。然后,根据累积的当前时刻之前的楼层地面位置数据和当前测定的楼层地面位置数据,推算与(a+b)/2相比的楼层地面位置的偏差的经时变化的倾向。异常判断部23基于推算得到的倾向,预测未来楼层地面位置的偏差达到容许值δ的时刻,将预测的时刻输出至电梯控制器109等电梯运转控制系统方。
89.楼层地面位置的偏差达到容许值δ的时刻通过如上所述地输出至电梯运转控制系统方,能够由维护作业人员作为运转信息获取。从而,通过在到达预测的时刻前的维护时,实施测定楼层地面位置用的测定运转,能够对于与第二位置检测器3的输出值相对的经年的因素(例如被检测体4的伸长、建筑物自身的经年的压缩等)的影响进行补偿。由此,能够抑制因楼层地面位置数据的偏差而引起的可开门位置的偏差、和将安全控制器110中的楼层地面位置数据用于停靠控制的情况下的轿厢的停靠时的位置偏差等。
90.另外,可开门位置输出部22(图2)输出的可开门位置数据除了被用于电梯控制器109等的控制之外,也被用于安全控制器110所具备的其他安全功能24。该安全功能例如是ucmp(unintended car moving protection:开门行驶保护装置)或etsd(emergency terminal speed
‑
limiting device:终端层减速装置)等,除了轿厢的位置检测值之外,也使用门开关的开门检测值和轿厢的速度检测值。
91.根据上述实施方式,安全控制器110在第二位置检测器3中发生异常的情况下,将第一位置检测器的输出设定为用于电梯控制的可开门位置。由此,能够高可靠性地设定可开门位置。另外,即使第二位置检测器3中发生异常,也能够使轿厢100进行缩退运转,在可开门位置使轿厢门112开闭。
92.另外,安全控制器110使轿厢100进行测定运转,同时与在井道内在与楼层地面位置和可开门位置对应的位置设置的第一位置检测器1的输出相应地,获取第二位置检测器3的输出值,使用获取的输出值计算各楼层的楼层地面位置(停靠位置)和可开门位置的范围,并设定在db21中。因此,在安装时,对安全控制器110和电梯运转控制系统(电梯控制器109等)进行的楼层地面位置和可开门位置的设定作业减轻。另外,楼层地面位置和可开门
位置的再次设定作业也同样减轻。
93.进而,因为根据与第一位置检测器1的输出(on边沿和off边沿)相应地获取的第二位置检测器3的输出值计算楼层地面位置(停靠位置)和可开门位置的范围,所以即使第二位置检测器3的输出值因检测轿厢100的绝对位置用的被检测体4的经年变化或建筑物的经年变化而变动,也能够对其影响进行补偿,可靠地设定楼层地面位置和可开门位置。
94.上述实施方式中,安全控制器110和电梯运转控制系统(包括电梯控制器109)分别具有独立的位置检测装置。即,安全控制器110具备第一位置检测器1和被检测体2、以及第二位置检测器3和长形的被检测体4,另一方面,电梯控制器109具备旋转编码器等脉冲发生器107。但是,电梯控制器109从安全控制器110获取用于控制(例如停靠控制等)的楼层地面位置和可开门位置的数据。另外,不限于这样的位置检测的方式,例如也可以作为独立的位置检测装置地,由安全控制器110具备第二位置检测器3和被检测体4,由电梯控制器109具备旋转编码器等脉冲发生器107,并且使第一位置检测器1和被检测体2在安全控制器110和电梯控制器109中共用。该情况下,第一位置检测器1和被检测体2在安全控制器110中被用于上述楼层地面位置和可开门位置的设定,在电梯控制器109中被用于通常的控制(停靠控制等)。
95.另外,图6中示出的db生成处理除了电梯安装时之外,也在维护时执行。例如,第一位置检测器和被检测体2因地震等而发生了位置偏移的情况下,在使设置位置恢复为最初的位置之后,执行db生成处理。另外,即使在异常判断部23判断为异常的情况下,也执行db生成处理。通过这些,db21中保存的楼层地面位置和可开门位置的数据的可靠性提高。
96.另外,本发明不限定于上述实施方式,包括各种变形例。例如,上述实施方式是为了易于理解地说明本发明而详细说明的,并不限定于必须具备说明的全部结构。另外,对于各实施方式的结构的一部分,能够追加、删除、置换其他结构。
97.例如,电梯设备也可以是曳引机和控制装置设置在井道内的无机械室型的电梯设备。
98.另外,多个电梯单机在一个层站中出发到达的情况下,可以作为缩退运转,使发生了异常的单机停止,以与通常相比更少的电梯单机数继续进行服务运转。
99.附图标记说明
100.1第一位置检测器,2被检测体,3第二位置检测器,4被检测体,20可开门位置生成部,21db(数据库),22可开门位置输出部,23异常判断部,100轿厢,104绳轮,105导向轮,106电动机,107脉冲发生器,108电力转换器,109电梯控制器,110安全控制器,111层站门,112轿厢门,113对重,115层站。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1