用于自动装箱棒上的产品的方法和设备与流程
1.本发明涉及一种用于自动装箱棒上的产品(products on stick)、特别是棒上的冰淇淋的设备。
2.本发明还涉及一种通过上述自动装箱设备自动装箱棒上的产品、特别是棒上的冰淇淋的方法。
背景技术:
3.表述“棒上的产品”通常意指包括棒的食品,该棒具有对可食用产品的支承功能以及在消费时用于使用者抓持的功能。
4.在根据本发明的技术领域中,棒上产品直接包装在箱子内部,而没有为每个单独的产品提供任何包裹物,因此采用裸产品的常规名称。
5.用于自动装箱在现有技术的棒上的产品的设备使用输送线,棒上的产品在输送线上移动,然后由拾取单元将其拾取,并容纳在适合于任何输送和最终销售的箱子中。
6.通常,自动装箱设备包括沿着输送线可移动的一系列单元,每个单元设计成容纳并保持至少一种棒上的产品。
7.棒上的产品存在于自动装箱设备的入口处,在这里装载装置将它们放置在装载区的相应单元上。
8.沿着输送线移动的这些单元将棒上的产品从装载区输送到卸载区,在那里棒上的产品由相应的单元拾取,并使用上述拾取单元放置在箱子内部。
9.在工业过程中,要装在每个箱子内部的棒上的产品的数量是预先确定的,并且可能不会发生变化,以免对最终产品的质量和用户满意度产生不利影响。
10.实际上,过多数量的棒上的产品可能会导致箱子中产品的过度压缩,它们中的至少一部分可能会变质。
11.另一方面,产品数量不足会导致最终消费者不满意,最终消费者所支付的产品数量要比箱子外部标明的数量少。
12.在这个意义上,在使用的自动装箱设备中,实施控制措施以使装箱错误最小化,从而确保成品和装箱产品的最佳和恒定质量。
13.这些控制系统中最平常的是在拾取和装箱工位下游包括人工控制部。根据该系统,操作员在密封之前对箱子中的内容物进行视觉评估,并检查箱子内部的产品的数量是否与预定数量相对应。
14.然而,这种方法相对于自动化活动具有人类活动通常存在的明显缺点,主要是在控制过程的有效性和效率方面。
15.因此,已经提出了自动装箱设备的解决方案,该解决方案能够使用该设备中集成的控制系统来测量棒上的产品的实际位置。
16.根据由控制系统检测到的位置,设备调整从单元进行拾取的操作,以使拾取单元拾取并始终放置相同数量的棒上的产品。
17.这些解决方案要求拾取单元能够适应在单元上的棒上的产品的实际位置,以便不在不输送要包装的产品的单元处执行拾取操作。
18.所述拾取单元的实施导致自动装箱设备、特别是拾取单元的复杂性显著增加,其必须能够适应棒上的产品的实际位置,因此增加了生产、管理和维护费用。
技术实现要素:
19.本发明的目的是提供一种用于自动装箱棒上的产品的设备,该设备具有特别简单、灵活的结构并且具有特别减少的生产、管理和维护成本。
20.本发明的另一个目的是提供一种用于以高效和有效性自动装箱棒上的产品的方法,并且其实现特别灵活和简化。
附图说明
21.在下面参照附图对实施例进行的详细描述中,根据本发明的用于自动装箱棒上的产品的设备和方法的优点和特征更加明显,附图中:
22.‑
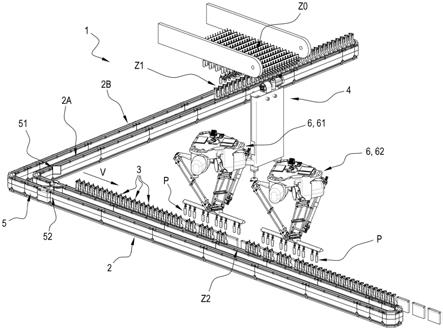
图1示出了根据本发明的自动装箱设备的实施例的立体图;
23.‑
图2示出了借助圆圈突出显示的图1的自动装箱设备的细节的立体图;
24.‑
图3示出了图2所示的自动装箱设备的细节的俯视图;
25.‑
图4示出了图1的自动装箱设备的元件的立体图;
26.‑
图5示出了图4的自动装箱设备的元件的侧体图;
27.‑
图6示出了图1的自动装箱设备的元件的立体图;
28.‑
图7示出了图6的自动装箱设备的元件的细节的立体图;
29.‑
图8示出了图1的自动装箱设备的元件的立体图;
30.‑
图9示意性地示出了图8的自动装箱设备的元件的操作;
31.‑
图10示出了图1的自动装箱设备的多个元件的立体图;
32.‑
图11示出了图10所示的自动装箱设备的多个元件的替代性立体图;
33.‑
图12示出了图10和11中所示的自动装箱设备的多个元件中的元件的俯视立体图;
34.‑
图13示出了图1的自动装箱设备的元件的细节的俯视立体图;
35.‑
图14示出了图13的自动装箱设备的元件的细节的仰视立体图;
36.‑
图15示出了图13和14的自动装箱设备的元件的细节的俯视图;
37.‑
图16示出了根据本发明的自动装箱方法的步骤的框图。
具体实施方式
38.参考附图,附图标记1表示用于自动装箱棒上的产品p的设备。
39.在下面的描述中,术语“棒上的产品”表示较佳地在食品领域中的产品,其包括棒p1,该棒p1具有产品支承功能和在消费时由使用者抓持的功能。
40.属于该类别的常用产品的示例是具有棒的冰棒或冰淇淋,该棒较佳地由木制材料制成,以利于最终消费者抓持。
41.较佳地,根据本发明的自动装箱设备设计成用于自动装箱裸露式的棒上的产品,
即,将棒上的产品直接装箱在箱子内部,而不为每个单独的产品提供任何单独的包裹物。
42.在附图中,棒上的产品p示出为棒上的冰淇淋,其包括细长棒p1,该棒p1部分地插入棒上的产品中并且部分地从所述棒上的产品露出。
43.如特别在图1至3中所示,设备1包括输送线2。
44.根据一方面,所述输送线2是闭合的输送线,即,该输送线的起点和终点重合的输送线。
45.在实施例中,输送线2包括轨道,可移动元件能够沿着该轨道滑动,这将在下面描述。
46.如图所示,输送线2包括彼此连通的前向引导部2a和返回引导部2b。
47.较佳地,前向引导部2a的起点与返回引导部2b的终点重合,并且类似地,返回引导部2b的起点与前向引导部2a的终点重合。
48.换言之,前向引导部2a和返回引导部2b通过相应的端部连通。
49.较佳地,前向引导部2a和返回引导部2b沿它们的路径的至少一部分彼此平行。
50.较佳地,输送线2由传导性材料制成,通常由金属材料制成。
51.根据实施例,输送线2包括传导性元件并且构造成被沿着所述传导性元件的电流局部地穿过。
52.沿着所述传导性元件循环的局部电流较佳地由未示出的电流发生器供应,并且由也未示出的控制单元调制。
53.根据另一实施例,输送线2以局部方式被磁性极化,即,其具有沿其延伸部可变且永久的磁极化。
54.根据特别是在图2中示出的实施例,输送线2包括彼此成角度定位的第一部分21和第二部分22。
55.在所示的实施例中,第一部分21和第二部分22被设置成彼此成角度以形成90
°
的角度。
56.在其它实施例中,取决于专用于安装设备1的空间,在第一部分21和第二部分22之间形成的角度可以采用不同的值。
57.如附图所示,设备1包括与输送线2相关联的多个单元3。
58.更具体地,多个单元3的单元在馈送方向v上沿着前向引导部2a和返回引导部2b可移动。
59.更精确地,在输送线2的笔直伸展部中,单元3根据来自相反方向的馈送方向v沿着前向引导部2a和返回引导部2b可移动。
60.根据本发明的一方面,多个单元3中的每个单元独立于其它单元3沿所述输送线2可移动。
61.换言之,每个单元的移动独立于多个单元3中其它单元的位置或移动。
62.根据实施例,每个单元3以永久的方式被磁性极化。
63.根据另一个实施例,每个单元3包括传导性元件,该传导性元件构造成被电流局部地通过。
64.沿着所述传导性元件循环的局部电流由较佳地是便携式的但未示出的电流发生器供应,并且由也未示出的控制单元调制。
65.较佳地,当多个单元3中的每个单元被磁性极化时,输送线2包括传导性元件,并且构造成被沿着所述传导性元件的电流局部地通过。
66.类似地,当输送线2以局部方式被磁性极化时,多个单元3中的每个单元包括构造成用于被电流通过的传导性元件。
67.根据刚刚描述的两种构造,多个单元3沿着输送线2的移动由线性马达控制。
68.有利地,线性马达的使用包括应用局部电磁感应原理以触发每个单独的单元3独立于其它单元3的移动,较佳地取决于其在输送线2上的位置。
69.再次有利地,线性马达的使用允许单元3的特别精确的移动。
70.如特别在图10至12中所示,多个单元3中的每个单元包括保持系统31,该保持系统31构造成保持棒上的产品p。
71.较佳地,保持系统31包括两个元件,该两个元件在闭合位置和打开位置之间可移动,闭合位置用于保持棒上的产品p,较佳地在棒p1处,在打开位置中,能够插入或拾取棒上的产品p。
72.在图10至12中,保持系统31被示出为处于闭合位置,其中,两个可移动元件彼此面对以形成用于棒p1的座部,棒被保持在该座部内部并且棒上的产品p附连到相应的单元3。
73.在未示出的打开位置中,保持系统31的两个可移动元件间隔开,使得在用于插入或拾取棒上的产品p的所述棒p1的座部中产生开口。
74.取决于实施例,通过机械或机电系统来控制保持系统31的打开位置与闭合位置之间的构造变化。
75.如在图1中并且更详细地在图4和5中示出的,设备1包括操作地连接到输送线2的装载单元4。
76.所述装载单元4构造成在前向引导部2a的装载区域z1处将预定数量的棒上的产品p装载在相等数量的单元3上。
77.更具体地,装载单元4构造成用于从累积区z0拾取预定数量的棒上的产品p,并且用于将所述预定数量的棒上的产品p放置在定位在前向引导部2a的装载区z1处的相等数量的单元3上。
78.在附图中示出的实施例中,装载单元4包括输送元件40,用于将棒上的产品p从未示出的生产区输送到累积区z0。
79.较佳地,为了执行棒上的产品p的拾取和装载,装载单元4包括装载元件41,在图4和图5的实施例中示出。
80.装载元件41构造成用于将预定数量的棒上的产品p从累积区z0输送到装载区z1,并且将所述预定数量的棒上的产品p装载到在所述装载区z1中的前向引导部2a上存在的相等数量的单元3上。
81.在图4的实施例中,装载元件41构造成用于从累积区z0拾取十六个棒上的产品p,并且用于将所述十六个棒上的产品p装载在固定在装载区z1中的多个单元3上。
82.较佳地,装载元件41包括多个拾取元件42,每个拾取元件42构造成用于从累积区z0拾取棒上的产品p并将所述棒上的产品p输送到装载区z1,棒上的产品p在装载区z1装载在单元3上并由相应的保持系统31保持。
83.为了在从累积区z0到装载区z1的输送期间支承棒上的产品,拾取元件42包括拾取
系统43。
84.较佳地,拾取系统43包括两个元件,该两个元件在闭合位置和打开位置之间可移动,闭合位置用于保持棒上的产品p,较佳地在棒p1处,在打开位置中,能够插入或拾取棒上的产品p。
85.在图13至图15中所示的打开位置中,拾取系统43的两个可移动元件间隔开,使得在用于插入或拾取棒上的产品p的所述棒p1的座部中产生开口。
86.在未示出的闭合位置中,拾取系统43具有两个彼此面对的可移动元件,以形成用于棒p1的所述座部,在该座部内部保持棒,并且将棒上的产品p附连到相应的拾取元件42。
87.拾取系统43的打开位置和闭合位置之间的构造变化由机械系统控制,如图13至图15所示的实施例,其中在替代实施例中,使用推动件和相对的或机电式弹簧。
88.根据本发明的一个方面,设备1包括控制和返回单元5,该控制和返回单元5操作地连接到输送线2,并且在图2和3中更详细地示出。
89.有利地,控制和返回单元5相对于单元3的馈送方向v沿着前向引导部2a定位在装载单元4的下游。
90.控制和返回单元5构造成在控制和返回单元5处控制在沿着前向引导部2a传送的单元3中的棒上的产品p的存在。
91.较佳地,控制和返回单元5包括传感器51,该传感器51构造成检测在前向引导部2a上传送的每个单元3上存在或不存在所述棒上的产品p。
92.更佳地,传感器51是光学存在传感器。
93.更具体地,控制和返回单元5构造成选择性地中断单元3沿着前向引导部2a在馈送方向v上的移动,并且将移动已经被中断的单元3从前向引导部2a移动到返回引导部2b,而不使它们完成其在前向引导部上的路径。
94.更具体地,在本说明书中,单元3的移动的选择性中断意指不保持棒上的产品p的单元3沿着前向引导部2a的前向移动的中断,并且所述单元随后在返回引导部2b上移动。
95.另一方面,被控制和返回单元5检测为输送棒上的产品p的单元3沿前向引导部2a在馈送方向上继续。
96.有利地,这防止了没有输送棒上的产品p的单元3继续其沿前向引导部2a的移动,并且因此沿着前向引导部2a到达由于没有棒上的产品p它们将经受不必要的动作的位置。
97.较佳地,如特别在图3中示出的,控制和返回单元5包括交换引导部52。
98.所述交换引导部52在第一主动连接位置和第二非主动隔离位置之间可移动。
99.在第一主动连接位置,交换引导部52将前向引导部2a与返回引导部2b连接,以中断单元3沿前向引导部2a在馈送方向v上的移动,并使所述单元3从前向引导部2a移动到返回引导部2b。
100.有利地,如较佳地由传感器51检测到的,当单元3在不输送棒上的产品p的传送中时,交换引导部52处于第一主动连接位置。
101.在第二非主动隔离位置,交换引导部52局部地使前向引导部2a与返回引导部2b断开连接,以允许单元3沿前向引导部2a在馈送方向v上传送。
102.有利地,如较佳地由传感器51检测到的,当承载棒上的产品p的单元3正在运送时,交换引导部52处于第二非主动隔离位置。
103.在实施例中,控制和返回单元5包括未示出的切换单元,该切换单元操作地连接到交换引导部52并与传感器51连通。
104.切换单元构造成在第一主动连接位置和第二非主动隔离位置之间执行交换引导部52的状态切换。
105.切换单元较佳地与传感器51连通。
106.更佳地,切换单元根据由传感器51发送的信号进行操作,该信号表示在交换引导部52上在传送的单元上存在或不存在棒上的产品p。
107.这样,仅允许传感器51已经检测到输送棒上的产品p的单元3沿前向引导部2a在馈送方向v上移动。
108.有利地,另一方面,由传感器51检测到的不输送棒上的产品p的单元3在返回引导部2b上输送,鉴于没有棒上的产品,它们不完成其在前向引导部2a上的路径并因此经受不必要的活动。
109.再次有利地,在控制和返回单元5的相对于馈送方向v的下游,仅将输送棒上的产品p的单元3放置在前向引导部2a上,并且由设备1的部件执行的后续操作在最佳条件中进行。
110.根据本发明的另一方面,设备1包括操作地连接到输送线2的卸载单元6。
111.有利地,卸载单元6相对于单元3的馈送方向v沿着前向引导部2a定位在控制和返回单元5的下游。
112.如图1所示,卸载单元6包括至少一个拾取单元61、62。
113.所述至少一个拾取单元61、62构造成用于在前向引导部2a的卸载区z2处从单元3拾取预定数量的棒上的产品p,并且将所述预定数量的棒上的产品p装箱在多个箱子s内部。
114.在附图所示的实施例中,卸载单元6包括两个拾取单元61、62,其定位于前向引导部2a的卸载区z2中的两个相邻位置。
115.有利地,超过一个拾取单元的使用允许每个拾取单元仅部分地填充每个箱子s,使得箱子的完全填充在若干步骤中发生。
116.这样,有利地能够将棒上的产品p装箱在相应箱子s的内部,使得箱子s内部的相邻的棒上的产品的距离小于输送线2上相邻单元之间的最小距离,因此小于由所述单元输送的棒上的产品的最小距离。
117.更有利的是,将棒上的产品p装箱在箱子s内部,在箱子内部空间的使用方面是最佳的。
118.为了从单元拾取棒上的产品p并输送箱子s内部的所述棒上的产品,至少一个拾取单元61、62包括多个拾取元件63。
119.在图6中详细示出的实施例中,每个拾取单元61、62包括十个拾取元件63。
120.为了在从卸载区z2输送到多个箱子s期间支承棒上的产品p,每个拾取元件63都包括拾取系统64。
121.较佳地,拾取系统64包括两个元件,该两个元件在闭合位置和打开位置之间可移动,闭合位置用于保持棒上的产品p,较佳地在棒p1处,在打开位置中,能够插入或拾取棒上的产品p。
122.在未示出的打开位置中,拾取系统64的两个可移动元件间隔开,使得在用于插入
或拾取棒上的产品p的所述棒p1的座部中产生开口。
123.在图7中示出的闭合位置中,拾取系统64具有两个彼此面对的可移动元件,以形成用于棒p1的所述座部,在该座部内部保持棒,并且将棒上的产品p附连到相应的拾取元件63。
124.取决于实施例,通过机械或机电系统来控制拾取系统64的打开位置与闭合位置之间的构造变化。
125.本发明还示出了一种用于自动装箱棒上的产品p的方法100,如图16中的步骤所示。
126.根据本发明,自动装箱方法100包括准备步骤101,在准备步骤101中准备输送线2,该输送线又包括彼此连通的前向引导部2a和返回引导部2b、多个单元3、控制单元和返回单元5以及卸载单元6。
127.较佳地,准备步骤100包括准备装载单元4。
128.更佳地,准备步骤100包括准备传感器51。
129.上述部件的组成和布置与本说明书中上述的那些相同。
130.如图16所示,方法100较佳地包括放置步骤102,在该步骤期间,将棒上的产品p放置在多个单元3上。
131.在该定位步骤102之后,棒上的产品p被相应的单元3保持并沿着输送线2移动。
132.较佳地,放置步骤102包括装载步骤102'。
133.在装载步骤102'期间,装载单元4在前向引导部2a的装载区域z1处以与单元3的相等数量装载预定数量的棒上的产品p。
134.较佳地,从累积区z0拾取所述预定数量的棒上的产品p,其中,在相应生产之后,棒上的产品p保持静止,等待装载到相等数量的单元3上。
135.在图4和5所示的实施例中,在装载步骤102'期间,从累积区z0拾取十六个棒上的产品p,并将其装载在存在于装载区z1中的十六个单元3上。
136.再次如图16所示,方法100包括输送步骤103。
137.在输送步骤103期间,多个单元3沿着所述输送线2移动,根据馈送方向v较佳地首先在前向引导部2a上然后在返回引导部2b上。
138.根据本发明的一方面,在输送步骤3期间,多个单元3中的每个单元独立于其它单元移动。
139.换言之,每个单元的移动独立于多个单元3中其它单元的位置或移动。
140.较佳地,输送步骤103包括借助于线性马达来移动所述多个单元3中的每个单元。
141.根据该构造,根据其在输送线2上的位置,使用局部电磁感应原理来触发每个单独的单元3的移动。
142.根据实施例,输送线2局部地配备有传导性元件,该传导性元件构造成被局部电流通过,并且单元3由磁性极化材料制成。
143.根据另一个实施例,输送线2局部地配备有磁形极化元件,并且单元3包括传导性元件,该传导性元件构造成由通过电源产生的局部电流通过。
144.有利地,通过局部地适当地调节传导性元件内部的电流的流动,能够独立于其它单元局部地控制每个单元的移动。
145.再次有利地,线性马达的使用允许单元3的特别精确的移动。
146.根据本发明的另一个方面,方法100包括控制和返回步骤104。
147.在控制和返回步骤104期间,控制和返回单元5针对多个单元3中的每个单元,控制棒上的产品p的存在或不存在。
148.基于关于棒上的产品p存在或不存在的该信息,控制和返回单元5选择性地中断单元3沿前向引导部2a的移动,并且将所述单元3从前向引导部2a移动至返回引导部2b。
149.较佳地,控制和返回单元5中断没有棒上的产品p的单元3沿着前向引导部2a的移动,并且将没有棒上的产品的所述单元3从前向引导部2a移动到返回引导部2b,而没有使这些完成其沿着前向引导部2a的路径。
150.较佳地,借助于所述传感器51来检测在通过前向引导部2a传送的每个单元3上存在或不存在所述棒上的产品p。
151.甚至更佳地,控制和返回步骤104包括所述传感器3已经检测到有棒上的产品p的单元3在前向引导部2a上的前向移动,以及所述传感器3检测到没有棒上的产品p的单元3在返回引导部2b上的输送。
152.这样,有利地,仅允许传感器51已经检测到输送棒上的产品p的单元3沿前向引导部2a在馈送方向v上移动。
153.再次有利地,没有输送棒上的产品p的单元3继续沿前向引导部2a的移动,并且因此沿着前向引导部2a到达由于没有棒上的产品p它们将经受不必要的动作的位置。
154.如图16所示,方法100包括卸载步骤105,其中,所述卸载单元6在前向引导部2a的卸载区z2处从所述多个单元3拾取预定数量的棒上的产品p,以将它们放置在多个箱子s内部。
155.较佳地,在卸载步骤105中,每个箱子s的填充在若干步骤中发生,即,每个箱子首先在第一步骤处被部分填充,并且箱子的完全填充在至少一个后续步骤中发生。
156.在图9的实施例中,其中卸载单元6包括两个拾取单元,在两个步骤中填充箱子s,并且包括每个箱子装箱五个棒上的产品p。
157.在该实施例中,在第一拾取单元61处,根据其位置,四个箱子s首先填充有两个或三个棒上的产品p。
158.随后,在第二拾取单元62处,根据箱子是否已被第一拾取单元填充有两个或三个棒上的产品p,将四个箱子s中的每一个填充有三个或两个棒上的产品p,从而用五个棒上的产品p填充每个箱子s。
159.这样,有利地能够将棒上的产品p装箱在相应的箱子s内部,使得在箱子s内部的相邻的棒上的产品之间的距离小于输送线2上的单元3之间的最小距离,因此小于由所述单元输送的棒上的产品的最小距离。
160.较佳地,卸载步骤105包括将所述多个棒上的产品p放置在所述多个箱子s内部,而每个棒上的产品p不具有单独的包裹物,即,棒上的产品以裸露方式包装。
161.根据本发明的自动装箱设备使得能够提供一种用于以特别简单、灵活的结构并且特别是减少生产、管理和维护成本的方式自动地装箱棒上的产品的设备。
162.也是本发明的目的的自动装箱方法使得能够提供用于高效且有效地自动装箱棒上的产品的方法,并且其实施特别灵活和简便。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1