一种机器人自主乘坐电梯的系统的制作方法
1.本发明涉及机器人控制领域,尤其涉及一种机器人自主乘坐电梯的系统。
背景技术:
2.现在机器人越来越用于生活中,比如在酒店中客人利用app、链接wifi推送的服务页面或打客服电话等,请求一些物品,服务中心就可以利用配送机器人将客人所需物品送到客人所在的房间。之前和现在大部分都是通过人工完成的,人力成本较高,尤其在夜间有可能人力不够不能及时完成,造成客人不满,通过配置一定数量的机器人可较好地满足此项工作。
3.在酒店等场合,客人和机器人往往在不同的楼房,需要解决机器人如何乘坐电梯到达客人房间。人乘坐电梯比较容易,比如在起始楼层电梯外部选择按上行或下行的按钮,进入电梯后选择按要到达的楼层,判断到达指定的楼层后出电梯,这些对机器人来说还是有些难度的。如何使机器人像人一样自主乘坐电梯呢?已有一些公开的方案解决类似的问题,如对电梯进行改造,在电梯内外安装相关设备,诸类方法成本较高、不易操作,往往难以推广。
技术实现要素:
4.为了解决以上技术问题,本发明提供了一种机器人自主乘坐电梯的系统,在电梯无需改造的情况下,可以以较低的成本和良好的可操作性解决机器人自主乘坐电梯问题。
5.本发明的技术方案是:
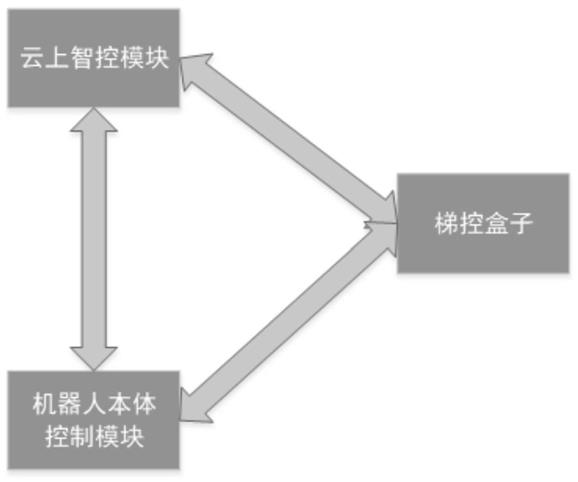
6.一种机器人自主乘坐电梯的系统,主要由三部分组成:一个是梯控盒子,是一个带嵌入式系统的硬件,与智能电梯相连;另一个是云上智控模块,是一个软件模块,部署于云中;第三个是机器人本体控制模块,也是一个软件模块,部署于机器人本体中。三个模块彼此间均可通讯,通过相关指令协同控制电梯启停、开关门、上下行等,从而达到机器人自主乘坐电梯的目的。
7.进一步的,
8.梯控盒子、云上智控模块、机器人本体控制模块均安装智能机器人操作系统iros,iros负责以上三个模块间的软件底层通讯和协同。
9.梯控盒子可安装到电梯轿厢顶部,带有一块控制板及电源等,并提供rj45、wifi、can、rs232、rs485、蓝牙、4g、5g等通讯模块,这些通讯模块可选装。
10.其中,
11.rj45、wifi、can、rs232、rs485等主要用于依据智能电梯的不同与智能电梯通信;
12.rj45、wifi、4g、5g等用于与云上智控模块通讯;
13.蓝牙主要用于与机器人本体控制模块通讯。
14.进一步的,
15.云上智控模块可通过tcp/ip协议与梯控盒子和机器人本体控制模块通讯,如接收
来自机器人本体控制模块的乘梯请求,并将该请求发送到梯控盒子,梯控盒子依据与电梯的协议转换为模拟人从电梯外部按的相关指令控制电梯到机器人所在的楼层,梯控盒子还将控制的结果通过云上智控模块反馈到机器人本体控制模块,如将要乘坐几号电梯(如果楼梯间多电梯且联动的话)。
16.再进一步的,
17.电梯将要到达指定楼层时,梯控盒子通过云上智控模块告知机器人本体控制模块,机器人本体控制模块通过机器人上安装的摄像头对将要乘坐的电梯进行监控,并将拍摄到的监控画面实时发送到云上,由云上智控模块进行ai分析,判断确认电梯门已开;机器人本体控制模块然后将电梯内的乘员情况照片发送到云上,云上智控模块进行ai分析,给出机器人进入路线图;机器人本体控制模块控制机器人按规划好的路线进入电梯,进入过程中利用机器人的超声波传感器进行避障,并在需要时及时修正行进路线。
18.机器人本体控制模块进入电梯后与梯控盒子通过蓝牙直接通讯,模拟人在电梯内部的行为,告知到达的楼层并通知关电梯门。
19.电梯到达指定楼层后,梯控盒子通知机器人本体控制模块,机器人本体控制模块控制机器人出电梯,期间会利用机器人摄像头、超声波等传感器数据,指引机器人安全出梯。
20.机器人完成配送后,再次乘坐电梯返回,过程同上。
21.本发明的有益效果是
22.通过梯控盒子硬件及云上智控模块、机器人本体控制模块协同控制,同时也利用了ai技术,达到了机器人自主安全乘梯的目的。
附图说明
23.图1是机器人自主乘坐电梯的系统结构框图。
具体实施方式
24.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.如图1所示,机器人自主乘坐电梯的系统主要由三部分组成:一个是梯控盒子,是一个带嵌入式系统的硬件,与智能电梯相连;另一个是云上智控模块,是一个软件模块,部署于云中;第三个是机器人本体控制模块,也是一个软件模块,部署于机器人本体中。三个模块彼此间均可通讯,通过相关指令协同控制电梯启停、开关门、上下行等,从而达到机器人自主乘坐电梯的目的。
26.梯控盒子、云上智控模块、机器人本体控制模块均安装智能机器人操作系统iros,iros负责以上三个模块间的软件底层通讯和协同。
27.梯控盒子中带有一块控制板及电源,并提供rj45、wifi、can、rs232、rs485、蓝牙、4g、5g等通讯模块,这些通讯模块可选装。
28.rj45、wifi、can、rs232、rs485等主要用于依据智能电梯的不同与智能电梯通信;
29.rj45、wifi、4g、5g等用于与云上智控模块通讯
30.蓝牙主要用于与机器人本体控制模块通讯。
31.云上智控模块可通过tcp/ip协议与梯控盒子和机器人本体控制模块通讯,如接收来自机器人本体控制模块的乘梯请求,并将该请求发送到梯控盒子,梯控盒子依据与电梯的协议转换为模拟人从电梯外部按的相关指令控制电梯到机器人所在的楼层,梯控盒子还将控制的结果通过云上智控模块反馈到机器人本体控制模块,如将要乘坐几号电梯(如果楼梯间多电梯且联动的话)。
32.电梯将要到达指定楼层时,梯控盒子通过云上智控模块告知机器人本体控制模块,机器人本体控制模块通过机器人上安装的摄像头对将要乘坐的电梯进行监控,并将拍摄到的监控画面实时发送到云上,由云上智控模块进行ai分析,判断确认电梯门已开;机器人本体控制模块然后将电梯内的乘员情况照片发送到云上,云上智控模块进行ai分析,给出机器人进入路线图;机器人本体控制模块控制机器人按规划好的路线进入电梯,进入过程中利用机器人的超声波传感器进行避障,并在需要时及时修正行进路线。
33.机器人本体控制模块进入电梯后与梯控盒子通过蓝牙直接通讯,模拟人在电梯内部的行为,告知到达的楼层并通知关电梯门。
34.电梯到达指定楼层后,梯控盒子通知机器人本体控制模块,机器人本体控制模块控制机器人出电梯,期间会利用机器人摄像头、超声波等传感器数据,指引机器人安全出梯。
35.机器人完成配送后,再次乘坐电梯返回,过程同上。
36.以上所述仅为本发明的较佳实施例,仅用于说明本发明的技术方案,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1