具有塔式起重机结构的风力发电装置的制作方法
1.本实用新型涉及一种风力发电机,更详细地,涉及具有塔式起重机结构的风力发电装置,其适用塔式起重机结构,从而不受风量及风速、天气及场所等环境的拘束,可在需要的地方生产安全且丰富的电力。
背景技术:
2.最近随着煤炭、石油资源枯竭,对于作为代替能源的风力发电的关心与日俱增。
3.根据现有技术的风力发电装置虽然具有可简单地设置该装置的优点和不产生另外的废弃物的优点,但问题在于,主要使用巨大的螺旋桨或叶片而使得主轴旋转,并使得与该主轴连接的发电机旋转而发电,因此基本上需要宽广的面积的设施,从而需要很多设施费用,在没有风的时候主轴不能旋转,从而无法实现风力发电。
4.此外,现有的风力发电装置选择风大的较高山岳地带,但现实是在较高的山岳地带设立风力发电机,为了设置电线杆和通路而不可避免地造成自然环境的损坏。
5.与此相反,塔式起重机(tower crane)用于港口装卸货物或高层建筑而发达起来,设置于造船厂的船台和码头等,作为在超高层建筑或公寓建设现场中广泛使用的装备,根据最高处部分的模样分为悬臂形和锤头形,悬臂(凸出为臂模样)形是将旋转框架设置于塔尖,附着悬臂进行旋转运动或吊运车(trolley)的直线运动,从而对货物进行拉升或下降的作业,锤头形是将旋转框架设置于塔尖,在此以左右平衡的形式安装吊杆(boom),从而以水平地实现荷重的移动的形式使用。
6.作为现有的悬臂形塔式起重机的一个例子,根据现有专利第10
‑
2014
‑
0113984号,如图1所示,起重机本体100'包括:底座110’;桅杆(mast)120’,其向上侧长长地设置于底座110';悬臂(jib)130',其沿相对桅杆120’交叉的方向与桅杆120’的上部连接。为了设置这样的现有的塔式起重机需要充分的面积,但是已设置的塔式起重机只是活用于在建设现场移动货物的作业,有一定的限制。因此,现实要求一种塔式起重机式环保型风力发电机,其克服现有的塔式起重机及风力发电机的概念,通过将风力发电装置形成于建设现场使用的塔式起重机,从而与现有的风力发电装置不同,不受环境拘束也可生产安全且大量的电力,从而可帮助工业发电。
技术实现要素:
7.本实用新型欲提供一种发电装置,希望通过提供具有现有的塔式起重机结构的风力发电机来生产工业现场需要的电力,在悬臂配备有风力发电装置的叶片,根据需要设置于各种建设现场或作业场所,在使用塔式起重机使得作业对象物移动的过程中根据悬臂的升降动作及旋转动作实现风力发电,或使得悬臂根据已设定的程序自动运转并形成人工风力,从而进行风力发电。
8.为了达成上述目的,本实用新型构成为,包括:基础桅杆,其垂直设置于位于地面的基础锚上;驾驶室框架,其设置于基础桅杆上;塔头,其设置于基础桅杆的上端部并位于
驾驶室框架上部,包括避雷针;悬臂单元,其以可在基础桅杆上部进行升降动作及旋转动作的形式设置;伸缩架,其设置于基础桅杆,包括液压上升装置,液压上升装置调节基础桅杆并使得悬臂单元进行升降动作;旋转装置控制齿轮部,其使得悬臂单元进行旋转动作;一个以上的叶片模块,其与悬臂单元的前端部结合并通过风力进行旋转而发电;还包括远程控制部,其通过有线或无线连接并远程控制悬臂单元的动作,在风速不理想的情况下,远程控制部根据已设定的程序自动操作悬臂单元,或手动操作悬臂单元,从而可通过根据悬臂单元的动作产生的风力使得叶片模块旋转而进行风力发电。
9.悬臂单元构成为,包括:主悬臂,其以可旋转的形式连接于旋转装置控制齿轮部;平衡臂,其以可旋转的形式连接于旋转装置控制齿轮部;主悬臂拉杆,其一端与主悬臂连接,另一端与塔头连接,从而形成张力;平衡臂拉杆,其一端与平衡臂连接,另一端与塔头连接,从而形成张力;卷绕用钢索,其以一端与主悬臂末端部结合,另一端与平衡臂末端部结合的形式与塔头连接。
10.远程控制部实时收集气象信息,以收集的气象信息为基础决定悬臂单元的三维位置信息,将已决定的三维位置信息和当前悬臂单元的三维位置信息进行对照并生成x、y、z轴变位值,以生成的变位值为基础生成动作信号,将生成的动作信号传输至伸缩架和旋转装置控制齿轮部。接着,伸缩架读取包含在动作信号的z轴变位值并传输至液压上升装置,使得悬臂单元升降,以便当前悬臂单元的高度(z轴)到达已决定的悬臂单元的高度(z轴)。此外,旋转装置控制齿轮部读取包含在动作信号的x、y轴变位值,使得悬臂单元旋转,以便当前悬臂单元的位置(x、y)到达已决定的悬臂单元的位置(x、y轴)。
11.此外,根据实施例,远程控制部以收集的气象信息为基础,决定悬臂单元的旋转数及旋转方向和升降次数并生成多个动作信号,将一系列动作信号传输至伸缩架和旋转装置控制齿轮部,伸缩架和旋转装置控制齿轮部根据一系列动作信号在已设定的时间期间进行悬臂单元的升降动作及旋转动作,从而形成人工风力并可使得叶片模块发电。
12.平衡臂还包括平衡锤,主悬臂还包括吊运车,其位于主悬臂的内侧,沿着主悬臂移送并决定用于卷绕作业的旋转半径,根据需要可执行作为塔式起重机的功能。
13.叶片模块包括:基础框架,其连接多个叶片螺旋桨;马达单元,其沿宽度方向设置于基础框架的内部。
14.马达单元包括多个滚珠螺杆装置,其通过驱动马达、驱动链轮、链条及从动链轮进行驱动。
15.本实用新型的特征及优点通过根据附图的下面的详细说明将变得更为明确。
16.根据本实用新型,效果在于,不仅可以通过悬臂的升降动作及旋转动作人工生成发电所需的风力,而且可使得叶片螺旋桨位于多种高度及多种方向,从而考虑自然产生的风向及风速,能更有效地进行发电,与现有的风力发电机不同,各种工业部门所需的电力不受场所和环境的拘束,可在需要的地方安全地生产供给丰富的电力。
附图说明
17.图1是示出以往的塔式起重机的结构的图。
18.图2是概略地示出本实用新型的具有塔式起重机结构的风力发电装置的结构的侧面图。
19.图3是详细地示出在根据本实用新型的实施例的悬臂单元结合有叶片模块的状态的图。
20.图4是详细地示出在根据本实用新型的又另一个实施例的悬臂单元结合有叶片模块的状态的图。
21.图5是俯视在根据本实用新型的又另一个实施例的悬臂单元结合有叶片模块的状态的图。
22.图6是详细地示出本实用新型的叶片模块的结构的图。
23.图7是概略地示出本实用新型的具有塔式起重机结构的风力发电装置的运转状态的顺序图。
24.图8是概略地示出根据本实用新型的实施例的具有塔式起重机结构的风力发电装置的运转状态的顺序图。
25.标号说明
26.110:悬臂单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111:主悬臂
27.111a:吊运车
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112:平衡臂
28.112a:平衡锤
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113:主悬臂拉杆
29.114:平衡臂拉杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
115:钢索
30.120:基础桅杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130:驾驶室框架
31.140:塔头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
150:伸缩架
32.160:旋转装置控制齿轮部
ꢀꢀꢀꢀꢀꢀ
200:叶片模块
33.210:叶片螺旋桨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220:基础框架
34.230:马达单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300:远程控制部
具体实施方式
35.以下,参照附图对本实用新型的优选的实施例进行说明。在此过程中,为了说明的明了性和便利,附图所示的线的厚度或构成要素的大小等可能被夸张地表示。
36.此外,后述的术语作为考虑到本实用新型的功能而定义的术语,其根据使用者、运用者的目的或惯例可能会有所不同。因此,对于这样的术语的定义应该以本说明书的全部内容为基础而做出。
37.并且,下面的实施例不是限定本实用新型的权利范围,而仅仅是本实用新型的权利要求书中提出的构成要素的例示事项,包含在本实用新型的说明书全文的技术思想中且包括可作为权利要求书的构成要素中的均等物进行替换的构成要素的实施例可以包括在本实用新型的权利范围内。
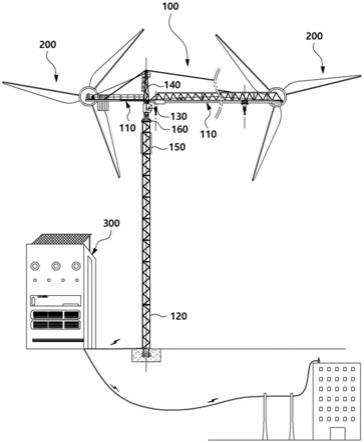
38.图2是概略地示出本实用新型的具有塔式起重机结构的风力发电装置的结构的侧面图。
39.参照图2,包括:基础桅杆120,其垂直设置于位于地面的基础锚上;驾驶室框架130,其设置于基础桅杆120上;塔头140,其设置于基础桅杆120的上端部并位于驾驶室框架130上部,包括避雷针;悬臂单元110,其以可在基础桅杆120上部进行升降动作及旋转动作的形式设置;伸缩架150,其设置于基础桅杆120,包括液压上升装置(未示出),液压上升装置调节基础桅杆并使得悬臂单元110进行升降动作;旋转装置控制齿轮部160,其使得悬臂
单元110进行旋转动作;一个以上的叶片模块200,其与悬臂单元110的前端部结合并通过风力进行旋转而发电;还包括远程控制部300,其通过有线或无线连接并远程控制悬臂单元110的动作,在风速不理想的情况下,远程控制部300根据已设定的程序自动操作悬臂单元110,或手动操作悬臂单元110,从而可通过根据悬臂单元110的动作产生的风力使得叶片模块200旋转而进行风力发电。伸缩架150的液压上升装置包括泵(未示出)和马达(未示出),伸缩架150还附着有具有攀升杆的连杆、支撑杆、站台及驱动轨。此外,液压上升装置(未示出)沿基础桅杆120的攀升部分设置。
40.根据以上内容,本实用新型的风力发电装置具有在建设现场使用的塔式起重机结构的同时,在悬臂配备风力发电装置,从而不受场所和环境的拘束,可在需要的地方安全地生产供给各种工业部门所需的电力。此外,与现有的风力发电装置不同,不损坏自然和环境也可环保地进行风力发电。此外,效果在于,远程控制部300可将已发电的电力供给至需要电力的多种工业部门及家庭。
41.图3是详细地示出在根据本实用新型的实施例的悬臂单元结合有叶片模块的状态的图,图4是详细地示出在根据本实用新型的又另一个实施例的悬臂单元结合有叶片模块的状态的图。
42.参照图3及图4,悬臂单元110构成为,包括:主悬臂111,其以可旋转的形式连接于旋转装置控制齿轮部160;平衡臂112,其以可旋转的形式连接于旋转装置控制齿轮部160;主悬臂拉杆113,其一端与主悬臂111连接,另一端与塔头140连接,从而形成张力;平衡臂拉杆114,其一端与平衡臂112连接,另一端与塔头140连接,从而形成张力;卷绕用钢索115,其以一端与主悬臂111末端部结合,另一端与平衡臂112末端部结合的形式与塔头140连接。
43.参照图3对本实用新型的实施例进行说明,平衡臂112还包括平衡锤112a,主悬臂111还包括吊运车111a,其位于主悬臂111的内侧,沿着主悬臂移送并决定用于卷绕作业的旋转半径,根据需要可执行作为塔式起重机的功能,同时使用人工形成的风可使得叶片模块200发电。根据上述的实施例,优选地,为了执行作为塔式起重机的功能,主悬臂的长度形成为比平衡臂的长度长。
44.参照图4对本实用新型的又另一个实施例进行说明,具有塔式起重机结构的风力发电装置除作为塔式起重机的功能外,根据需要还可以仅进行风力发电。此时,主悬臂的长度可形成为比现有塔式起重机的主悬臂长度短,如图所示,主悬臂和平衡臂也可形成为相同的长度。
45.图5是俯视在根据本实用新型的又另一个实施例的悬臂单元结合有叶片模块的状态的图。如图5所示,根据本实用新型的又另一个实施例,主悬臂和平衡臂可配备有多个,在各主悬臂和平衡臂末端部配备有叶片模块200,从而利用从东西南北四个方向中一个以上的方向吹来的风力,使得一个以上的叶片模块进行风力发电,从而可更有效地进行发电。
46.图6是详细地示出本实用新型的叶片模块的结构的图。
47.参照图6,叶片模块200包括:基础框架220,其连接多个叶片螺旋桨210;马达单元230,其沿宽度方向设置于基础框架的内部。
48.叶片螺旋桨可由耐热、耐磨性优秀的铝、不锈钢材料等其他的现有通常使用的叶片螺旋桨材料构成。此外,叶片螺旋桨也可通过物理或化学方法采用耐磨性强的材料。根据实施例,叶片螺旋桨可由纤维增强塑料(frp,fiber reinforced plastics)制作,将由玻璃
纤维或碳纤维构成的纤维材料作为树脂多层粘合在外侧面,使之硬化而形成纤维增强材料。
49.此外,马达单元包括多个滚珠螺杆装置,其通过驱动马达、驱动链轮、链条及从动链轮进行驱动。
50.图7是概略地示出本实用新型的具有塔式起重机结构的风力发电装置的运转状态的顺序图。
51.参照图7,远程控制部300实时收集气象信息,以收集的气象信息为基础决定悬臂单元110的三维位置信息,将已决定的三维位置信息和当前悬臂单元110的三维位置信息进行对照并生成x、y、z轴变位值,以生成的变位值为基础生成动作信号,将生成的动作信号传输至伸缩架150和旋转装置控制齿轮部160。然后,伸缩架150读取包含在动作信号的z轴变位值并传输至液压上升装置,使得悬臂单元110升降,以便当前悬臂单元110的高度(z轴)到达已决定的悬臂单元110的高度(z轴)。此外,旋转装置控制齿轮部160读取包含在动作信号的x、y轴变位值,使得悬臂单元110旋转,以便当前悬臂单元110的位置(x、y轴)到达已决定的悬臂单元110的位置(x、y轴)。根据记述的结构,考虑自然产生的风向及风速,可使得叶片螺旋桨位于最适合的高度及最适合的方向,从而可更有效地进行风力发电。
52.图8是概略地示出根据本实用新型的实施例的具有塔式起重机结构的风力发电装置的运转状态的顺序图。
53.参照图8,远程控制部300以收集的气象信息为基础,决定悬臂单元110的旋转数及旋转方向和升降次数并生成多个动作信号,将一系列动作信号传输至伸缩架150和旋转装置控制齿轮部160,伸缩架150和旋转装置控制齿轮部160根据一系列动作信号在已设定的时间期间进行悬臂单元110的升降动作及旋转动作,从而形成人工风力并可使得叶片模块200发电。
54.以上,通过具体的实施例对本实用新型进行了详细地说明,但这是为了具体地说明本实用新型,本实用新型不限定于此,在本实用新型的技术思想内具有该领域的一般知识的人可进行变形或改良。
55.本实用新型的单纯的变形乃至变更都属于本实用新型的范畴,本实用新型的具体保护范围通过权利要求书得以明确。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1