一种垃圾分类处理装置的制作方法
1.本实用新型涉及垃圾分类处理技术领域,具体为一种垃圾分类处理装置。
背景技术:
2.垃圾分类(英文名为:garbage classification),一般是指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用,减少垃圾处理量和处理设备,降低处理成本,减少土地资源的消耗,具有社会、经济、生态等几方面的效益。
3.垃圾在储存阶段属于公众的私有品,垃圾经公众投放后成为公众所在小区或社区的区域性准公共资源,垃圾分类搬运到垃圾集中点或转运站后成为没有排除性的公共资源。从国内外各城市对生活垃圾分类的方法来看,大多都是根据垃圾的成分、产生量,结合本地垃圾的资源利用和处理方式等来进行分类的。
4.但是公众在投放塑料袋或纸袋装的袋装垃圾时,可能会投放到与垃圾种类不符合的分类垃圾桶中,而一般的视觉装置也达不到隔着垃圾袋判断垃圾种类的效果。原有垃圾分类工作中,督导工作需投入大量人员记录居民的分类准确率,占用大量的人力物力,资金投入大,需要有一种简单方便的垃圾分类及分离装置。
技术实现要素:
5.本实用新型的目的在于提供一种结构合理,可对用户投放的垃圾进行准确判断,根据相应的垃圾种类判断和分类质量判断,并依据垃圾种类和分类准确率的判断选择相对应的分类存贮器存贮的新型垃圾分类处理装置。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种垃圾分类处理装置,包括垃圾分离装置、可旋转垃圾接收平台,所述的垃圾分离装置包括底座、控制装置、与底座可转动连接的垃圾分类桶,所述的垃圾分类桶底部设有称重装置、转动装置,所述的垃圾分类桶还设有容量测量装置,所述的可旋转垃圾接收平台包括多个垃圾存放容器,所述的多个垃圾存放容器中的一个位于垃圾分类桶在底座上旋转后的桶口下方,所述的称重装置、转动装置、容量测量装置分别与控制装置电连接。本方案中使用者将垃圾投放到垃圾分类桶中,经过称重装置和容量测量装置检测出垃圾质量和体积,然后控制装置计算密度并判断垃圾种类后,可控制对应的垃圾存放容器旋转到垃圾分离装置下方,然后控制装置在控制转动装置使得垃圾分类桶旋转并将垃圾倒入垃圾存放容器中,再控制转动装置将垃圾分类桶复位。
8.优选的,所述的底座包括底板、两块侧板,所述的垃圾分类桶通过连接轴杆与底座的两块侧板分别铰接。
9.优选的,所述的垃圾分类桶的转动装置包括伸缩气缸,所述的伸缩气缸一端与底座铰接,所述的伸缩气缸另一端与垃圾分类桶底部铰接。本方案伸缩气缸与垃圾分类桶底部的铰接点位于垃圾分类桶底部的中部,而垃圾分类桶与底座的铰接点位于垃圾分类桶的
前侧,伸缩气缸伸长时,可推动垃圾分类桶绕垃圾分类桶与底座的铰接点旋转。
10.优选的,所述的垃圾分类桶的转动装置包括正反转电动机、联动轴、连杆,所述的联动轴与底座可转动连接,所述的正反转电动机与联动轴一端轴连接,所述的连杆包括相互铰接的第一连杆臂、第二连杆臂,所述的第一连杆臂一端固定在联动轴中部,所述的第二连杆臂一端与垃圾分类桶底部铰接。本方案中,联动轴位于底座后端,而垃圾分类桶与底座的铰接点位于底座前端,联动轴由正反转电动机带动旋转时,可带动第一连杆臂一起旋转,第一连杆臂的旋转可使得第二连杆臂产生位移和旋转,从而带动垃圾分类桶绕垃圾分类桶与底座的铰接点旋转。
11.优选的,所述的可旋转垃圾接收平台包括底部平台、电动机、传动装置、旋转轴、转台,所述的多个垃圾存放容器呈环形均布在转台上,所述的旋转轴一端与底部平台可旋转连接、另一端与转台固定连接,所述的电动机、传动装置设于底部平台与转台之间,所述的电动机通过传动装置与旋转轴传动连接,所述的电动机与控制装置电连接,所述的电动机为步进电机。本方案中,垃圾分类桶用于对垃圾进行处理,处理完成后对垃圾种类进行判断和分类,分类确定后,控制装置控制可旋转垃圾接收平台将与垃圾种类符合的垃圾存放容器放置到垃圾分类桶旋转后的桶口下方,然后控制垃圾分类桶旋转将垃圾排出到垃圾存放容器内;可旋转垃圾接收平台上预设多个垃圾存放容器,例如3个或4个等,放置在转台上,转台可受控转动指定角度,将指定的垃圾存放容器放置到垃圾分类桶旋转后的桶口下接收垃圾。
12.优选的,所述的底部平台与转台之间设有定位装置,所述的定位装置包括定位点、多个定位点识别装置,所述的定位点位置与垃圾排放口配合设置,所述的多个定位点识别装置分别与多个垃圾存放容器位置配合设置,所述的定位装置与控制装置电连接。本方案中,在底部平台与垃圾排放口对应位置设置定位点,在转台上对应每个垃圾存放容器的位置设置定位点识别装置(行程开关、红外开关等),控制装置可根据定位信息控制电机启动或关闭,从而将转台旋转到指定角度。
13.优选的,所述的转台上设有多个与垃圾存放容器一一对应的限位槽。本方案限位槽用于限定垃圾存放容器的位置,方便转台能够将垃圾存放容器准确放置到垃圾排放口下方。
14.优选的,所述的称重装置包括设于垃圾分类桶底部的称重板、称重传感器,所述的称重传感器与控制装置电连接。本方案的称重装置,称重板设于垃圾分类桶内底部,与垃圾分类桶桶底之间弹性连接空间,称重传感器设于弹性连接空间内,将重量变换信号传送给控制装置读取垃圾重量。
15.优选的,所述的容量测量装置包括摄像头、图像识别装置,所述的摄像头、图像识别装置分别与控制装置电连接。本方案除了可以在垃圾分类桶内采用位置传感器,即检测桶内垃圾堆积到多少高度来判断垃圾体积,也可以采用图像识别装置,即使用现有的图像识别技术,对垃圾在垃圾分类桶中的位置图片进行拍摄和识别,并事先建立垃圾在垃圾分类桶中占据各种体积的图片库,从而在当前图片与图片库对比中可判断桶内垃圾所占体积。
16.本方案在一个敞开式的垃圾分类桶中,对袋装垃圾进行重量、体积测算,根据袋装垃圾净质量和空间体积计算垃圾密度值,从而可判断袋装垃圾的种类和垃圾分类的准确
率,在判断出垃圾分类种类后,控制装置控制可旋转垃圾接收平台将与垃圾分类种类符合的垃圾存放容器放置在垃圾分类桶翻转后的桶口下方,然后将垃圾排放到垃圾存放容器内。
17.密度是物质的特性之一,每种物质都有一定的密度,不同物质的密度一般是不同的,因此我们可以利用密度来鉴别物质,其办法是测定待测物质的密度,把测得的密度和密度表中各种物质的密度进行比较,就可以鉴别物体是什么物质做成的;质量=密度
×
体积,m=ρ*v,m表示质量、ρ表示密度、v表示体积。
18.将装有垃圾的垃圾袋放入设备中,垃圾分类桶感应到垃圾袋后,自动运行,测量出垃圾袋的实际体积,垃圾分类桶还有称重功能,在测出体积的同时,也测算出垃圾袋的质量,得到垃圾袋质量跟体积这2个数值后,得出投放垃圾的密度。本方案中,垃圾的重量通过称重传感器进行测量,并通过摄像头拍摄垃圾分类桶中物品形成图像并传给图像识别装置,然后由图像识别装置判断垃圾分类桶中物品所占体积,由控制装置根据垃圾和物品的重量和体积来计算密度,从而判断垃圾种类。
19.通过长期的试验和观察,从垃圾的质量和体积,计算密度,从密度指标判断垃圾分类垃圾的含量指标,基本上可以判定垃圾的种类,以密度1.0为基础,上下浮动50%为合格,低于这个指标为不合格,超过这个指标袋内可能有重金属之类的东西,如下表:
[0020][0021]
在多次试验中,从人工测评的三个等级和机器评定的两个等级相比,评测出的结果正确率100%。
[0022]
与现有技术相比,本实用新型的有益效果是:结构合理,可对用户投放的垃圾进行质量和体积测量,并可根据质量体积测量来计算密度以准确判断垃圾种类和垃圾分类的准
确率,然后根据垃圾种类和分类准确率人工智能选择分类投放承接的容器,并实现后分类转运、管理的数据应用需求。
附图说明
[0023]
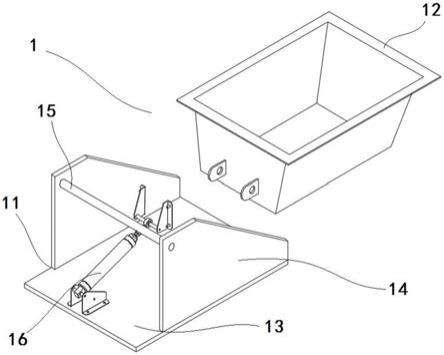
图1为本实用新型垃圾分离装置的一种结构示意图。
[0024]
图2为本实用新型垃圾分离装置的另一种结构示意图。
[0025]
图3为本实用新型可旋转垃圾接收平台的一种结构示意图。
[0026]
图4为本实用新型可旋转垃圾接收平台的一种俯视结构示意图。
[0027]
图中:1
‑
垃圾分离装置2
‑
可旋转垃圾接收平台
[0028]
11
‑
底座
ꢀꢀ
12
‑
垃圾分类桶
ꢀꢀꢀꢀ
13
‑
底板
ꢀꢀꢀꢀ
14
‑
侧板
[0029]
15
‑
连接轴杆
ꢀꢀ
16
‑
伸缩气缸
ꢀꢀꢀ
17
‑
联动轴
ꢀꢀꢀꢀ
18
‑
连杆
[0030]
21
‑
垃圾存放容器 22
‑
底部平台
ꢀꢀꢀ
23
‑
转台
[0031]
24
‑
限位槽。
具体实施方式
[0032]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0033]
请参阅附图1
‑
4,本实用新型提供一种技术方案:
[0034]
一种垃圾分类处理装置,包括垃圾分离装置1、可旋转垃圾接收平台2,垃圾分离装置1包括底座11、控制装置、与底座11可转动连接的垃圾分类桶12,垃圾分类桶12底部设有称重装置、转动装置,垃圾分类桶12还设有容量测量装置,可旋转垃圾接收平台2包括多个垃圾存放容器21,多个垃圾存放容器21中的一个位于垃圾分类桶12在底座11上旋转后的桶口下方,称重装置、转动装置、容量测量装置分别与控制装置电连接;
[0035]
底座11包括底板13、两块侧板14,垃圾分类桶12通过连接轴杆15与底座11的两块侧板14分别铰接。
[0036]
一种垃圾分类桶12的转动装置包括伸缩气缸16,伸缩气缸16一端与底座11铰接,伸缩气缸16另一端与垃圾分类桶12底部铰接。
[0037]
另一种垃圾分类桶12的转动装置包括正反转电动机、联动轴17、连杆18,联动轴17与底座11可转动连接,正反转电动机与联动轴17一端轴连接,连杆18包括相互铰接的第一连杆臂、第二连杆臂,第一连杆臂一端固定在联动轴17中部,第二连杆臂一端与垃圾分类桶12底部铰接。
[0038]
可旋转垃圾接收平台2包括底部平台22、电动机、传动装置、旋转轴、转台23,四个垃圾存放容器21呈环形均布在转台23上,旋转轴一端与底部平台22可旋转连接、另一端与转台23固定连接,电动机、传动装置(图中未示出)设于底部平台22与转台23之间,电动机通过传动装置与旋转轴传动连接,电动机与控制装置电连接,电动机为步进电机;
[0039]
底部平台22与转台23之间设有定位装置(图中未示出),定位装置包括定位点、四个定位点识别装置,定位点位置与垃圾排放口配合设置,四个定位点识别装置分别与四个
垃圾存放容器21位置配合设置,定位装置与控制装置电连接;
[0040]
转台23上设有多个与垃圾存放容器21一一对应的限位槽24。
[0041]
称重装置包括设于垃圾分类桶12底部的称重板、称重传感器,称重传感器与控制装置电连接。
[0042]
容量测量装置包括摄像头、图像识别装置,摄像头、图像识别装置分别与控制装置电连接。
[0043]
具体使用过程是:本方案中,使用者将装有垃圾的垃圾袋放入设备中,垃圾分类桶感应到垃圾袋后,本方案中,垃圾的重量通过称重传感器进行测量,并通过摄像头拍摄垃圾分类桶中物品形成图像并传给图像识别装置,然后由图像识别装置判断垃圾分类桶中物品所占体积,得到垃圾袋质量跟体积这2个数值后,由控制装置根据垃圾和物品的重量和体积来计算密度,从而判断垃圾种类;
[0044]
在判断出垃圾分类种类后,控制装置控制可旋转垃圾接收平台将与垃圾分类种类符合的垃圾存放容器放置在垃圾分类桶翻转后的桶口下方,然后将垃圾排放到垃圾存放容器内。
[0045]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1