一种可多角度运动的拐臂式双平台折叠伸缩绝缘臂的制作方法
1.本实用新型涉及高空作业设备技术领域,特别涉及一种可多角度运动的拐臂式双平台折叠伸缩绝缘臂。
背景技术:
2.高空作业机械是在工程起重机械基础上发展起来的高空作业设备,广泛应用在建筑、消防等行业。随着我国经济建设的不断发展,对高空作业车的需求越开越多,要求工作范围也越来越广泛。
3.高空作业车是运送工作人员和使用器材至高空对位于高空的设备进行安装、维护、清洗的专用特种车辆,与搭脚手架、梯子等传统的作业方式相比具有作业性能好、作业效率高、作业安全等优点,目前广泛应用于电力、交通、石化、通信、园林等基础设施行业。
4.高空作业车有多种分类方式,按臂架的形式分类,可分为有直臂式和曲臂式两种基本形式,直臂式高空作业车是一种用来运送工作人员和工作装备到指定高度进行作业的特种车辆。在高空作业车臂架升降过程中,臂架和水平面必然会产生一定的夹角,引起工作斗以相同角度倾斜,因此,要求调平机构能够实时地对工作斗的倾斜角度进行调整,使工作斗处于要求的安全状态。曲臂式高空作业车能悬伸作业、跨越一定的障碍或在一处升降可进行多点作业;平台载重量大,可供两人或多人同时作业并可搭载一定的设备;适用于车站、码头、商场、体育场馆、小区物业、厂矿车间等大范围作业。它是由液压或电动系统支配多支液压油缸,能够上下举升进行作业的一种车辆。
5.按工作臂的型式分类,有四种基本型式,分别为:垂直升降式、折叠臂式、伸缩臂式和混合臂式。高空作业设备一般设置有变幅机构、水平方向旋转机构、平衡机构、和行走机构,依靠变幅机构和水平方向旋转机构实现载人或机器人工作斗在垂直和水平方向的移动;依靠平衡机构实现工作斗和水平面之间的夹角保持不变,依靠行走机构实现工作场所的转移。但是,如果作业环境复杂,如高空中对高压导线输电线路进行接线时,由于绕线轨迹不规范、线圈的线径粗、折弯力较大、折弯运动空间受限等,给高空接线增加了难度。再就是,工作过程中由于人为的操作失误或者恶劣的自然条件等因素,折叠臂高空作业车会出现不稳定的现象,严重时甚至会发生倾翻事故,这不仅会损坏作业车本身而且会危及操作者和周围行人的生命安全。因此,在进行高空作业车整车设计时,对整车稳定性进行分析是非常必要的。所以,急需一种可以实现对作业区域精准定位、安全性高的作业设备。
6.在使用一般高空作业设备,高空作业时,具体还存在以下不足:1、不管现有的高空作业平台是移动式高空作业平台,蜘蛛式高空作业平台,自行式高空作业平台,还是剪叉式高空作业平台,工作平台在支撑臂固定后很难进行范围内的调整,不能满足对多角度,多维度作业的需要。当出现作业位置变动时,需要调整支撑臂位置来实现对高空作业平台的位置调节,来达到对指定作业区域精准作业的目的;即使作业位置变动较小也需要调整支撑臂位置来实现,使用不灵活,从而导致作业质量差,作业效率低。2、现有的高空作业平台到达指定作业区域都是通过举升臂的整体举升提高、移动的方式达到,使用极为不灵活,作业
效率低。
7.实用新型专利201721608938.7,公开了一种油电双动力控制高空作业车,包括车架和设在车架上的升降机构,升降机构包括底座,底座的底部设有转盘,转盘的内部设有液压马达,底座上依次设有第一升降臂、第二升降臂和第三升降臂,底座和第一升降臂之间设有第一液压缸,第一升降臂和第二升降臂之间设有第二液压缸,第二升降臂和第三升降臂之间设有第三液压缸,第三升降臂的末端设有工作斗,所述的车架内设有油电双动力单元液压系统,油电双动力单元液压系统包括安装在车架底部的液压油箱、与底盘发动机相连的底盘变速箱和高空作业车上装;具有结构设计合理,油电双动力单元液压系统保证了高空作业车具有使用电机驱动液压系统时零油耗,清洁无噪音,节能环保的优点。
8.上述发明针对高空作业车的油泵、液压系统和电力系统进行改进,克服高空作业车长时间工作时消耗成本高、机器损伤的问题,对于现有的狭小空间内提高高空作业的灵活性没有实质性改进。
9.发明专利201310015363.8,公开了及一种工作斗调平系统及折叠臂高空作业车,包括液压子系统、控制子系统和安装在举升臂上的调平机构,调平机构包括托架、摇杆、连杆和调平油缸,调平油缸的缸筒端通过销轴与举升臂铰接,托架固接在工作斗上,托架与举升臂通过销轴在第一铰点(g)铰接,摇杆的一端、连杆的一端和调平油缸的活塞杆端通过销轴在第二铰点(d)铰接,摇杆的另一端和举升臂通过销轴在第三铰点(e)铰接,连杆的另一端和托架通过销轴在第四铰点(f)铰接,各铰点间的距离满足de+ge>df+gf的关系,调平机构通过调平油缸的伸缩来驱动托架相对于举升臂转动,来对工作斗进行调平。本发明能够解决变幅角度较大时工作斗调平容易出现死点的问题。
10.上述发明针对工作斗调平的方式进行了改进,但是调平结构繁琐,且不能没有解决当作业区域需要小范围提升、降低变动高度时,也需要通过举升臂的整体提高来实现的技术问题,在水平方向及垂直方向上不能对工作平台进行适应性调整,调整方式不够灵活,不能满足在日常施工中对高空作业车的灵活性需求。
技术实现要素:
11.针对现有技术存在的不足,本发明的目的是提供一种结构简单,可实现操作平台的多角度旋转,来实现对工作区域全方位覆盖作业,同时可实现对操作平台进行单独提升调节,使用灵活,作业效率高,安全、稳定性好的高空作业车用可实现高精度定位的作业装置。
12.为达到上述目的,本发明采取的技术方案是:一种可多角度运动的拐臂式双平台折叠伸缩绝缘臂,包括车架,设置在车架上的承载架,在承载架的上方设有由立柱、转塔、下臂、轴节、上臂、伸缩臂、工作斗依次连接组成的上装,在承载架的下方设置有用于整体移动高空作业车的两平行设置的行走机构,所述伸缩臂的顶端设置有用于调节工作斗位置的拐臂,所述拐臂包括一用于与上臂连接的支撑装置,一用于连接工作斗的小拐臂,以及一用于连接支撑装置与小拐臂的旋转机构。
13.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述支撑装置包括一t字型支撑座,所述支撑座的下端通过销轴连接在伸缩臂前端的上侧,还包括一一端连接在t字型支撑座前端下方,另一端连接在伸缩臂前端下侧的支撑座臂,所述支撑座臂包括支撑座
上臂、支撑座下臂,以及连接支撑座上臂和支撑座下臂的次找平油缸;所述小拐臂的一端通过旋转机构连接在t字型支撑座的前端的上方,另一端通过工作斗旋转油缸与工作斗的承载架连接,所述旋转机构为一端与支撑座连接,另一端与小拐臂连接的小拐臂旋转油缸。
14.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述立柱底部设置有用于为上装的油缸提供液压油的液压油箱,所述液压油箱通过油管与油缸连接,所述转塔通过旋转机构连接在立柱的顶端。
15.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述下臂上安装有用于下臂举升的下臂举升油缸,所述上装还包括用于下臂在下臂举升油缸的举升力下平稳提升的通过销轴与转塔、轴节固定的连杆,所述下臂、下臂举升油缸、拉杆的一端连接在转塔上,构成用于上装在提升过程中处于水平状态的四连杆机构。
16.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述上臂包括一端通过销轴连接在轴节上,另一端使用销轴连接在上臂上用于举升上臂的上臂举升油缸。
17.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述伸缩臂包括通过伸缩油缸与上臂配合运动的绝缘段和非绝缘段,所述伸缩臂的内侧设置有控制油管自由运动的坦克链。
18.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述t字型支撑座的后侧上方设置有用于起吊作业工具和/或材料的吊装装置。
19.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述工作斗包括用于调整工作斗相对于小拐臂垂直位置的升降装置。
20.上述的可多角度运动的拐臂式双平台折叠伸缩绝缘臂,所述工作斗为双工作斗结构,所述升降装置上设置有用于控制工作斗升降高度的独立升降传感器,所述工作斗旋转油缸上设置有用于控制工作斗旋转角度的回转传感器。
21.本实用新型可多角度运动的拐臂式双平台折叠伸缩绝缘臂的有益效果是:通过使用旋转机构,带动安装在车架之上的上装做回转运动,通过与转塔连接的下臂、下臂顶升油缸和拉杆的支撑件并与轴节配合,构成四连杆机构,保证上装提升过程中处于水平状态,拐臂结构不仅能使工作斗和小拐臂一起绕支撑座前端部的小拐臂旋转油缸旋转,还能让工作斗独立绕小拐臂前端部的工作斗旋转油缸旋转,实现远端和近端的双向转动,非常灵活的满足了工作斗的多角度、全方位运动功能,不用单独再转动旋转机构来带动上装整体来达到使用效果,提高施工过程中在寻找工作都工作角度的安全性。并且使用次找平油缸带动支撑臂上臂和支撑臂下臂相对运动,调整支撑座的水平位置,从而达到调整工作斗水平位置的目的。
附图说明
22.图1为本实用新型右侧后视立体结构示意图;
23.图2为本实用新型左侧后视立体结构示意图;
24.图3为本实用新型侧视结构示意图;
25.图4为本实用新型俯视结构图示意图;
26.图5为本实用新型拐臂结构立体示意图
27.图6为本实用新型拐臂结构侧视示意图。
具体实施方式
28.为使本领域技术人员更好的理解本技术方案,下面结合附图及具体实施方式对本实用新型进行详细说明。
29.如图1
‑
6所示,一种可多角度运动的拐臂式双平台折叠伸缩绝缘臂,包括车架以及安装在车架上的上装,所述上装的上臂5顶端设置有使用连接机构连接的用于调节上装的工作斗 4位置的拐臂1,所述拐臂包括一用于与上臂连接的支撑装置2,一用于连接工作斗的小拐臂 24,以及一用于连接支撑装置与小拐臂的拐臂旋转机构25。
30.连接机构包括设置有绝缘段和非绝缘段的通过伸缩油缸与上臂配合运动的伸缩臂51,支撑装置包括一t字型支撑座21,支撑座的下端通过销轴连接在伸缩臂前端的上侧,还包括一一端连接在t字型支撑座前端下方,另一端连接在伸缩臂前端下侧的支撑座臂22,所述支撑座臂包括支撑座上臂221、支撑座下臂222,以及连接支撑座上臂和支撑座下臂的次找平油缸 23;所述小拐臂的一端通过旋转机构连接在t字型支撑座的前端的上方,另一端通过工作斗旋转油缸与工作斗的承载架连接,所述旋转机构为一端与支撑座连接,另一端与小拐臂连接的小拐臂旋转油缸。
31.下臂顶升油缸、上臂顶升油缸、调平装置油缸上设置有用于上装及拐臂任意运动阶段进行锁止的液压锁。
32.安装有上述装置的高空作业车,还包括:
33.立柱6,立柱是整个上装的支撑装置,保证上装工作的稳定性;底部通过螺栓与车架底座连接,顶部通过螺栓与旋转机构连接,立柱底部包含液压油箱,给上装工作提供液压油,立柱上部有集流环和集电环,用来分配有油路和电路。
34.旋转机构7,旋转机构由马达减速机配合蜗轮蜗杆组成,通过螺栓与立柱连接,通过螺栓与转塔连接,马达提供动力,带动减速机和蜗轮蜗杆,将液压能转换成机械能,带动上装做回转运动。
35.转塔8,转塔是下臂、下臂顶升油缸和拉杆的支撑件,与轴节配合,构成四连杆机构,保证上装提升过程中处于水平状态。
36.下臂9,下臂是平台的下部提升支撑件,由中间的绝缘部分和非绝缘部分构成,与转塔和轴节通过销轴固定。
37.连杆91,配合下臂,共同组成四连杆机构,确保下臂在顶升油缸作用下平稳提升,与转塔和轴节通过销轴固定。
38.下臂顶升油缸92,是下臂举升的执行机构,通过下臂顶升油缸,可实现下臂与水平面在 0
°
到88
°
之间任意运动。油缸配平衡阀或锁止件,确保下臂顶升油缸在任意运动位置下失去动力时,都会将油缸锁住。下臂顶升油缸与转塔通过销轴固定,与下臂固定支架通过销轴固定。
39.轴节93,轴节是上臂和下臂之间的连接过渡体,与上臂和下臂、拉杆等都是使用销轴固定。
40.上臂,上臂一端与轴节连接,轴节连接近侧设有上臂固定支架,外侧有固定滑块,有效防止伸缩臂与上臂之间直接摩擦。
41.上臂顶升油缸52,是上臂举升的执行机构,通过上臂举升油缸,可实现上臂在
‑
25
°
到 85
°
之间运动,油缸配平衡阀或锁止件,确保上臂在任意运动位置下失去动力,都会将油
缸锁住。上臂顶升油缸与轴节和下臂连接支架都是通过销轴固定。
42.主调平油缸53,与轴节销轴固定,并与上臂固定支架通过缸体与销轴固定。配合次找平油缸,对工作斗进行找平,不管处在任何位置,都能让工作斗始终处于水平状态。
43.伸缩臂,伸缩臂是由绝缘段和非绝缘段组成,伸缩臂装配在上臂内侧,通过伸缩油缸与上臂配合运动,伸缩臂内侧配有坦克链,以保证伸缩臂运动时油管能自由跟随伸缩臂运动而不干涉,防止油管损坏。
44.上臂伸缩油缸54,上臂伸缩油缸为伸缩臂运动提供动力,油缸配有平衡阀或锁止件,确认任意位置的锁止安全性,无杆腔一端与上臂通过销轴固定,有杆腔一端与伸缩臂通过销轴固定。
45.液压小吊3,起吊重物用,可采用液压驱动力对小吊单独旋转、升降和伸缩。安装在支撑座的后端上侧,与支撑座连接方式分为机械套筒定位和旋转油缸定位两种方式。
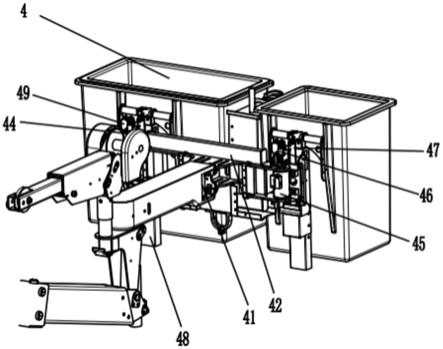
46.双人工作斗平台,包括一安装在高空作业车绝缘升降臂顶端的第一调节装置41,第一调节装置用于调整第一工作斗和第二工作斗的整体水平工作方向,一安装在第一调节装置上向两侧延伸用于增加水平工作范围的承载架,安装在所述承载架两端的第二调节装置和第三调节装置,第二调节装置用于调整第一工作斗的水平工作方向,第三调节装置用于调整第二工作斗的水平工作方向,第一调节装置、第二调节装置和第三调节装置均含有用于调整水平方向的调节旋转油缸45,旋转油缸上设置有用于控制工作斗旋转角度的回转传感器46,在第二调节装置上安装有用于调整第一工作斗工作高度的第一升降装置47,在第三调节装置上安装有用于调整第二工作斗工作高度的第二升降装置48。所述第一、第二升降装置均包括一用于固定工作斗的固定框,固定框上设有底梁,底梁上安装有用于升降工作斗的升降油缸,升降油缸顶端与工作斗连接,升降油缸与工作斗连接的中间位置设有垂直方向的导向腔,在导向腔内设有导轨,在工作斗的对应位置安装有用于控制工作斗沿导向腔方向滑动的导向滑块,第一升降装置和第二升降装置上设置有用于控制工作斗升降高度的独立升降传感器。
47.本方案中油缸的控制装置采用现有的油缸控制技术,即采用油缸本体、油泵、输油管道、电路信号及控制器的模式,控制器向油泵发送开始工作或停止工作的信号,输油管道向油缸内进油或出油,通过进油出油控制油缸本体的动作,从而达到本技术方案中所要实现的技术效果。
48.本方案中的活动连接采用销轴销轴孔铰接的方式,带有销轴孔的部件可以围绕销轴做圆周运动,通过其他部件或添加限位装置,控制带有销轴孔的部件的转动角度。
49.当然,上述说明并非对本实用新型的限制,本实用新型也并不局限于上述举例,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1