一种机器视觉垃圾分类装置
1.本实用新型涉及智能垃圾分类技术领域,特别涉及一种机器视觉垃圾分类装置。
背景技术:
2.随着人们对环保越来越重视,垃圾分类也越来越为人们所提倡。现有的垃圾分类大多通过人工辨别垃圾种类并投放至不同的垃圾桶中,即受人为主观因素影响,而对于垃圾分类知识并不熟悉的人来说,垃圾分类就是一件比较麻烦和困难的事,尤其对于区分不同的垃圾,极可能造成分类错误。此外,对于现有家用的语音智能垃圾桶,虽然能够判断垃圾种类,但仍需人工口述垃圾的名称,仍然不够方便。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供一种机器视觉垃圾分类装置,能够实现垃圾的智能分类且更为方便。
4.为了解决上述技术问题,本实用新型采用的技术方案为:
5.一种机器视觉垃圾分类装置,包括投放箱、存储箱和控制装置,所述投放箱位于所述存储箱上方,所述控制装置与所述投放箱或所述存储箱连接;
6.所述投放箱的内部设有图像采集装置以及在底部设有第一通孔;
7.所述存储箱在顶部设有与所述第一通孔连通的第二通孔和用于开关所述第二通孔的可旋转挡板,并在内部设有分类转盘以及至少两个位于所述分类转盘上的垃圾桶;
8.所述分类转盘连接有第一舵机,所述挡板连接有第二舵机,所述控制装置分别与所述第一舵机、所述第二舵机和所述图像采集装置连接;
9.所述第二通孔位于所述垃圾桶的转动轨迹上方。
10.进一步地,所述挡板为扇形,所述第一通孔和所述第二通孔的形状与所述垃圾桶的桶口形状对应,且所述挡板能够完全遮挡所述第二通孔。
11.进一步地,所述分类转盘与所述存储箱的底部间设有至少两个均匀分布的万向轮,所述万向轮的轮部抵触所述分类转盘的底面。
12.进一步地,所述垃圾桶的底部设有第一磁性配合件,所述分类转盘上设置有第二磁性配合件,所述垃圾桶和所述分类转盘通过所述第一磁性配合件与所述第二磁性配合件可拆卸连接。
13.进一步地,所述投放箱的顶部设有翻转盖。
14.进一步地,还包括一个用于开启垃圾识别的触发开关,所述触发开关与所述控制装置连接。
15.进一步地,还包括设于存储箱上方的高亮显示屏,所述高亮显示屏与所述控制装置连接。
16.进一步地,所述图像采集装置为摄像头。
17.进一步地,所述存储箱底部四角设有支撑足。
18.进一步地,所述控制装置包括一个工控电脑和一个控制器,所述工控电脑和所述控制器连接,所述图像采集装置和所述工控电脑连接,所述舵机和所述控制器连接。
19.本实用新型的有益效果在于:本新型在进行垃圾投放时,只需将垃圾放入投放箱,投放箱内的图像采集装置能够采集垃圾图像并由控制装置进行识别,控制装置识别垃圾种类后,控制分类转盘转动,将对应的垃圾桶置于投放箱下方,而后转动挡板,使垃圾落入对应的垃圾桶,完成垃圾的智能分类,也不需要用户对垃圾的名称进行口述,使用更加方便。
附图说明
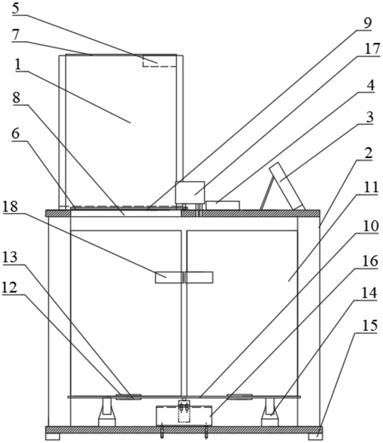
20.图1为本新型实施例一的一种机器视觉垃圾分类装置的结构截面图;
21.图2为本新型实施例二的一种机器视觉垃圾分类装置的结构截面图;
22.标号说明:
23.1、投放箱;2、存储箱;3、高亮显示屏;4、控制装置;5、图像采集装置; 6、第一通孔;7、翻转盖;8、第二通孔;9、挡板;10、分类转盘;11、垃圾桶;12、第一磁性配合件;13、第二磁性配合件;14、万向轮;15、支撑足; 16、第一舵机;17、第二舵机;18、光电对管;19、触发开关。
具体实施方式
24.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
25.请参照图1以及图2,一种机器视觉垃圾分类装置,包括投放箱、存储箱和控制装置,所述投放箱位于所述存储箱上方,所述控制装置与所述投放箱或所述存储箱连接;
26.所述投放箱的内部设有图像采集装置以及在底部设有第一通孔;
27.所述存储箱在顶部设有与所述第一通孔连通的第二通孔和用于开关所述第二通孔的可旋转的挡板,并在内部设有分类转盘以及至少两个位于所述分类转盘上的垃圾桶;
28.所述分类转盘连接有第一舵机,所述挡板连接有第二舵机,所述控制装置分别与所述第一舵机、所述第二舵机和所述图像采集装置连接;
29.所述第二通孔位于所述垃圾桶的转动轨迹上方。
30.从上述描述可知,本实用新型的有益效果在于:本新型在进行垃圾投放时,只需将垃圾放入投放箱,投放箱内的图像采集装置能够采集垃圾图像并由控制装置进行识别,控制装置识别垃圾种类后,控制分类转盘转动,将对应的垃圾桶置于投放箱下方,而后转动挡板,使垃圾落入对应的垃圾桶,完成垃圾的智能分类,也不需要用户对垃圾的名称进行口述,使用更加方便。
31.进一步地,所述挡板为扇形,所述第一通孔和所述第二通孔的形状与所述垃圾桶的桶口形状对应,且所述挡板能够完全遮挡所述第二通孔。
32.由上述描述可知,第一通孔和第二通孔形状与垃圾桶的桶口形状对应,保证垃圾能够完全落入垃圾桶内,挡板能够完全遮挡第二通孔,使得在未完成垃圾的分类识别时,垃圾无法落入垃圾桶,只有在完成分类识别后,才旋转挡板,使垃圾能够落入对应分类的垃圾桶。
33.进一步地,所述分类转盘与所述存储箱的底部间设有至少两个均匀分布的万向
轮,所述万向轮的轮部抵触所述分类转盘的底面。
34.由上述描述可知,在存储箱底部设置有万向轮,轮部抵触分类转盘底面,对分类转盘进行支撑,保证分类转盘的稳定,同时不会对分类转盘的旋转造成影响。
35.进一步地,所述垃圾桶的底部设有第一磁性配合件,所述分类转盘上设置有第二磁性配合件,所述垃圾桶和所述分类转盘通过所述第一磁性配合件与所述第二磁性配合件可拆卸连接。
36.由上述描述可知,通过第一磁性配合件和第二磁性配合件,使得垃圾桶转动可拆卸连接在所述分类转盘上,在需要对满载的垃圾桶进行处理时,能够更简单地取下垃圾桶。
37.进一步地,所述投放箱的顶部设有翻转盖。
38.由上述描述可知,投放箱的顶部设有翻转盖,能够减少垃圾气味的溢散。
39.进一步地,还包括一个用于开启垃圾识别的触发开关,所述触发开关与所述控制装置连接。
40.由上述描述可知,还设有一个用于开启垃圾识别的触发开关,在盖上翻转盖后,通过触发开关的触发,开启垃圾分类识别,使得垃圾自动落入对应的垃圾桶,方便使用。
41.进一步地,还包括设于存储箱上方的高亮显示屏,所述高亮显示屏与所述控制装置连接。
42.由上述描述可知,存储箱上方还设有高亮显示屏,用于显示垃圾投放的统计数据、提示垃圾是否满载以及进行垃圾分类宣传。
43.进一步地,所述图像采集装置为摄像头。
44.由上述描述可知,采用摄像头拍摄垃圾的图像,并由控制装置根据垃圾模型进行识别和分类。
45.进一步地,所述存储箱底部四角设有支撑足。
46.由上述描述可知,存储箱底部四角设有支撑足,放置更加稳固。
47.进一步地,所述控制装置包括一个工控电脑和一个控制器,所述工控电脑和所述控制器连接,所述图像采集装置和所述工控电脑连接,所述舵机和所述控制器连接。
48.由上述描述可知,控制装置包括工控电脑和控制器,由工控电脑进行数据处理和垃圾识别,并通过控制器对两个舵机进行控制。
49.请参照图1,本实用新型的实施例一为:
50.一种机器视觉垃圾分类装置,包括投放箱1、存储箱2、高亮显示屏3和控制装置4,投放箱1位于存储箱2上方,控制装置4与投放箱1或存储箱2连接。
51.其中,投放箱1的内部设有图像采集装置5,在底部设有第一通孔6,以及在顶部设有翻转盖7,控制装置4包括相互连接的一个工控电脑和一个控制器,高亮显示屏3设于存储箱2上方,且与工控电脑连接。
52.本实施例中,图像采集装置5为摄像头,且与工控电脑连接,在其他等同实施例中,图像采集装置5还可以为红外图像采集装置5或其他类型的图像采集装置5,只需在控制装置4中对应保存以红外图像采集装置5或其他类型的图像采集装置5预采集的垃圾模型用以进行分类识别即可。此外,本产品的人工智能分类算法由百度paddlepaddle提供技术支持,获取本地化的人工智能模型离线运行。
53.本实施例中,工控电脑为jetson工控电脑,控制器为mega2560控制器,且本产品支
持宽电压(40v
‑
7.5v)直流驱动,或220vac交流电接入。
54.如图1所示,存储箱2在顶部设有与第一通孔6连通的第二通孔8和用于开关第二通孔8的可旋转的挡板9,并在内部设有分类转盘10以及至少两个位于分类转盘10上的垃圾桶11。垃圾桶11的底部设有第一磁性配合件12,分类转盘10上设置有第二磁性配合件13,垃圾桶11和分类转盘10通过第一磁性配合件12与第二磁性配合件13可拆卸连接。分类转盘10与存储箱2的底部间设有至少两个均匀分布的万向轮14,万向轮14的轮部抵触分类转盘10的底面,存储箱2底部四角设有支撑足15。
55.本实施例中垃圾桶11的数量为四个,分别对应厨余垃圾、有害垃圾、可回收垃圾以及其他垃圾,第一磁性配合件12和第二磁性配合件13均为钕磁铁,在其它等同实施例中,垃圾桶11的数量可以根据垃圾需要分类的种类个数对应设置,第一磁性配合件12和第二磁性配合件13为可相互磁吸的两个部件,其材质可为但不限于磁铁和金属。
56.其中,第一通孔6和第二通孔8的形状与垃圾桶11的桶口形状对应,挡板 9为扇形,并能够完全遮挡第二通孔8。分类转盘10连接有第一舵机16,挡板 9连接有第二舵机17,控制器分别与第一舵机16、第二舵机17和图像采集装置 5连接。第二通孔8位于垃圾桶11的转动轨迹上方,使得第二通孔8能转动到对应的垃圾桶11的上方并使得投放箱1内的垃圾依次通过第一通孔6、第二通孔8之后落入到存储箱2。
57.本实施例中,存储箱2四面开放,并在各个垃圾桶11中靠近桶口的位置设有光电对管18,光电对管18与工控电脑连接,用于通过光线监测垃圾是否满载。
58.本实施例中,当用户打开翻转盖7,向投放箱1内投放垃圾,并关上翻转盖 7后,工控电脑根据翻转盖7动作触发开启垃圾分类识别流程,控制摄像头采集垃圾图像,并进行分类识别。在成功识别到垃圾的种类后,向控制器发送控制命令,控制器通过控制第一舵机16旋转分类转盘10,使对应分类的垃圾桶11 位于第二通孔8下方,并控制第二舵机17转动挡板9,撤开对第二通孔8的遮挡,使垃圾落入对应的垃圾桶11,从而完成垃圾的分类识别。在垃圾满载时,即垃圾覆盖光电对管18时,光电对管18向工控电脑发送脉冲信号,工控电脑通过高亮显示屏3显示垃圾满载的提示信息。在垃圾未满载时,工控电脑也会控制高亮显示屏3显示垃圾投放的统计信息等。
59.请参照图2,本实用新型的实施例二为:
60.一种机器视觉垃圾分类装置,与实施例的区别在于,还包括与控制装置4 连接的触发开关19,用于开启垃圾识别。
61.本实施例中,本实施例中,所述触发开关19为设置在翻转盖上方的按压开关,用户在关上翻转盖7后通过按压触发开关19触发开启垃圾分类识别流程;在其他等同实施例中,所述触发开关19还可以为光电开光或其他开关,光电开光设置在翻转盖7下方,用于感应光线强弱,在翻转盖7关上,即检测到光线强弱下降到预设程度时,向控制装置4发送电信号触发乏力分类识别流程。
62.综上所述,本实用新型提供的一种机器视觉垃圾分类装置,本新型在进行垃圾投放时,只需将垃圾放入投放箱,投放箱内的图像采集装置能够采集垃圾图像并由控制装置进行识别,控制装置识别垃圾种类后,控制分类转盘转动,将对应的垃圾桶置于投放箱下方,而后转动挡板,使垃圾落入对应的垃圾桶,完成垃圾的智能分类,也不需要用户对垃圾的名称进行口述,使用更加方便;同时具有满载提示功能,能够在高亮显示屏上进行垃圾满
载的提示;在垃圾桶底部和分类转盘上设置有磁性配合件,通过磁性配合件进行可拆卸连接,方便取出垃圾桶对垃圾进行下一步处理。
63.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1