多功能机器人综合应用工作站的制作方法
1.本实用新型涉及搬运机器人技术领域,尤其涉及多功能机器人综合应用工作站。
背景技术:
2.进入新世纪以来,我国的制造业得到了长足的发展,制造业也已日益成熟,在工厂的日常生产中,进行需要对货物进行搬运,随着技术的快速发展,通过机器人搬运以及逐渐取代其他搬运方法,目前市场上的搬运机器人,一般多采用机器人综合应用工作站对货物进行搬运,但是目前市场上的机器人综合应用工作站,在搬运方型货物时,无法快速固定,导致在运输过程中容易晃动,造成一定的安全隐患。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中在搬运方型货物时,无法快速固定,导致在运输过程中容易晃动等问题,而提出的多功能机器人综合应用工作站。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.多功能机器人综合应用工作站,包括车头和车架,还包括:
6.牙叉,通过提升机构与车架相连接;
7.底托,固定连接在牙叉上;
8.转动板,转动连接在底托上,且为对称设计的两组;
9.压板,固定连接在转动板上;
10.车架底部连接有对位机构,用以与设备对接并可靠定位;
11.其中,
12.车头上设有操作手柄。
13.为了提升牙叉,优选的,所述提升机构包括丝杠和电机,所述电机位于车头内,所述丝杠转动连接在车架上并与电机的输出端相连接,所述牙叉螺纹连接在丝杠上。
14.为了提高工作稳定性,优选的,所述对位机构包括对位板和导向板,所述对位板固定连接在车架底部,所述导向板滑动连接在对位板内,所述导向板与车架之间设有缓冲块,所述对位板上设有导向轮,所述导向轮与导向板相贴。
15.为了便于操作,优选的,所述车头上设有按钮和触摸屏。
16.在操作过程中,防止超重,进一步的,所述车头上还设有报警灯。
17.为了防护工作人员,优选的,所述车头上还设有脚踏板和护臂。
18.为了便于移动,优选的,所述车头底部还设有定向脚轮和万向脚轮。
19.为了使牙叉滑动更加平稳,优选的,所述车架上设有升降门架,所述牙叉在升降门架内滑动。
20.为了便于直观的观察物体高度,优选的,所述升降门架上设有刻度尺。
21.为了快速将货物取下,优选的,所述底托上设有凹槽。
22.与现有技术相比,本实用新型提供了多功能机器人综合应用工作站,具备以下有
益效果:
23.该多功能机器人综合应用工作站,通过将牙叉放置最低,将货物放置在底托上,通过压板,可快速将货物放置在指定区域内,在搬运过程中,通过转动板使物体保持稳固不动,通过对位板和缓冲块,可有效防止与其他物体相撞。
24.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本实用新型在使用过程中,在搬运货物时,通过压板,可以将货物准确定位在底托的具体位置上,通过对位机构提高了安全性,工作稳定性大大升高。
附图说明
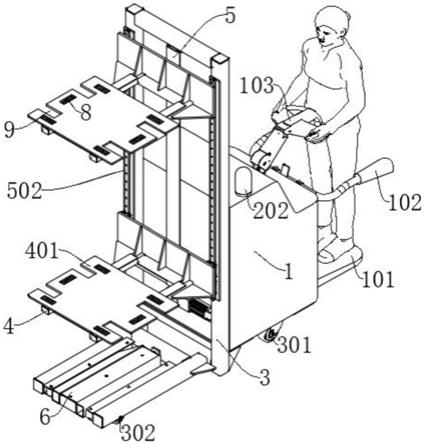
25.图1为本实用新型提出的多功能机器人综合应用工作站的结构示意图;
26.图2为本实用新型提出的多功能机器人综合应用工作站的主视图;
27.图3为本实用新型提出的多功能机器人综合应用工作站的侧视图;
28.图4为本实用新型提出的多功能机器人综合应用工作站的俯视图;
29.图5为本实用新型提出的多功能机器人综合应用工作站转动板的侧视图。
30.图中:1、车头;101、脚踏板;102、护臂;103、操作手柄;2、按钮;201、触摸屏;202、报警灯;3、车架;301、定向脚轮;302、万向脚轮;4、牙叉;401、底托;5、丝杠;501、刻度尺;502、升降门架;6、对位板;601、缓冲块;7、导向板;701、导向轮;8、转动板;801、压板;9、凹槽。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
32.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
实施例:
33.参照图1-5,多功能机器人综合应用工作站,包括车头1和车架 3,还包括:
34.牙叉4,通过提升机构与车架3相连接;
35.底托401,固定连接在牙叉4上;
36.转动板8,转动连接在底托401上,且为对称设计的两组;
37.压板801,固定连接在转动板8上;
38.车架3底部连接有对位机构,用以与设备对接并可靠定位;
39.其中,
40.车头1上设有操作手柄103。
41.提升机构包括丝杠5和电机,电机位于车头1内,丝杠5转动连接在车架3上并与电机的输出端相连接,牙叉4螺纹连接在丝杠5上;通过丝杠5转动实现提升功能。
42.提升机构可以设置成两组,两组提升机构上都分别连接有牙叉4,两组提升机构可
分别独立操作。
43.电机带动丝杠5转动,通过丝杠5实现牙叉4升降。
44.对位机构包括对位板6和导向板7,对位板6固定连接在车架3 底部,导向板7滑动连接在对位板6内,导向板7与车架3之间设有缓冲块601,对位板6上设有导向轮701,导向轮701与导向板7相贴。
45.通过对位板6和导向板7,插在货物底部的托盘中,可快速对准货物位置。
46.车头1上设有按钮2和触摸屏201。
47.按钮2和触摸屏201为市场上现有的,通过按钮2,可启动该设备,通过触摸屏201可实时了解该设备各种参数。
48.触摸屏201通过控制模块与电机信号连接。
49.车头1上还设有报警灯202。
50.车头1上还设有脚踏板101和护臂102。
51.可提高工作人员操作的稳定性。
52.车头1底部还设有定向脚轮301和万向脚轮302。
53.车架3上设有升降门架502,牙叉4在升降门架502内滑动。
54.通过升降门架502,提高牙叉4滑动的稳定性。
55.升降门架502上设有刻度尺501。
56.可快速判断出升降门架502上升的高度。
57.底托401上设有凹槽9。
58.在运输到目的地时,通过凹槽9可更加方便的将货物取下。
59.使用时,工作人员站在脚踏板101上,通过操作手柄103操纵该设备工作。
60.搬运货物时,将牙叉4放置最低,将货物放置在底托401上,通过压板801,可快速将货物放置在指定区域内,通过提升机构将货物提高,然后运走。
61.在搬运过程中,通过对位板6和缓冲块601,可有效防止与其他物体相撞,提高安全性。
62.当发生与货物相碰时,缓冲块601受到挤压,实现防止与其他物体相撞的目的,提高安全性。
63.以上所述,仅为本实用新型较佳的具体实施方便,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1