起入窖机器人的制作方法
1.本实用新型涉及酿酒工业设备领域,特别是涉及一种起入窖机器人。
背景技术:
2.在现有的原酒酿造领域中,当窖池布置在一楼地面、堆积堆布置在二楼时,需要将二楼堆积的酿酒料起堆后,跨楼层送到一楼的窖池进行布料。若在车间中间/两端设置一两部固定的跨楼层升降机进行转运,则二楼起堆设备、一楼入料装置或周转料桶需要运行很远的距离去对接,不能满足快节奏布料的生产需求。
3.还有的方法是在二楼堆积区楼板上分区设置若干个带升降的暂存桶,就近装入各堆积堆的酿酒料。但因一楼入料装置最高位在行车梁下面,与天花板上的暂存桶落差太大,酿酒料不宜直接转移,需要该暂存桶下降一定高度再与入料装置对接并转移酿酒料。入料装置接料后,就近运行至各窖池进行布料。该方法可以就近接料、就近布料,但入料装置无法直接接料,需依靠暂存桶的自行下降、嵌套对接,需多次转移酿酒料,工艺动作较为复杂,对设备稳定性和安全防护要求很高,并且耗时仍然较长。另外因酿造车间新建厂房面积大,需布置多套带升降功能的暂存桶,总体设备成本也比较高。
技术实现要素:
4.基于此,有必要针对上述提到的至少一个问题,提供一种起入窖机器人。
5.本实用新型申请提供的起入窖机器人,包括梁式行车、可移动抓斗机构、控制器和至少一个伸缩布料机构,所述控制器分别与所述可移动抓斗机构和所述伸缩布料机构电连接;
6.所述可移动抓斗机构包括移动部、第一伸缩架和抓斗,所述移动部设置在所述第一伸缩架的第一端,所述抓斗设置在所述第一伸缩架的第二端,所述移动部可在所述梁式行车上移动;
7.所述伸缩布料机构包括驱动部、第二伸缩架和转运箱,所述转运箱设置在所述第二伸缩架上并可在所述第二伸缩架上移动,所述第二伸缩架连接在所述驱动部上并可相对所述驱动部移动,所述驱动部可在所述梁式行车上移动;
8.所述可移动抓斗机构可在所述伸缩布料机构内穿行。
9.在其中一个实施例中,所述第二伸缩架包括层叠的至少两层门架,相邻两层所述门架可相对移动;最内层的所述门架的宽度大于所述可移动抓斗机构的最大宽度。
10.在其中一个实施例中,所述伸缩布料机构还包括连接在所述第二伸缩架上的翻斗部;所述转运箱的两个相对的侧端面上均设有一对支撑柱,所述支撑柱与所述翻斗部连接,所述翻斗部可驱动所述转运箱绕所述侧端面的法线转动预设角度。
11.在其中一个实施例中,所述翻斗部包括连接板块、旋转盘和两根同轴且相对的伸缩叉杆;所述连接板块上设有几何中心轴相互垂直的第一连接孔和第二连接孔,所述第一连接孔和所述第二连接孔至少部分重合;所述支撑柱可插设在所述第一连接孔内,所述伸
缩叉杆可插设在所述第二连接孔内;所述旋转盘与所述连接板块可拆卸连接;所述旋转盘的盘面与所述转运箱的侧端面平行。
12.在其中一个实施例中,所述翻斗部还包括第三伸缩架,所述第三伸缩架与所述旋转盘连接,并可驱动所述旋转盘在所述支撑柱的轴向上移动。
13.本实用新型的实施例中提供的技术方案带来如下有益技术效果:
14.本实用新型提供的起入窖机器人通过在同一梁式行架上设置可举降的可伸缩布料机构和可伸缩及可移动的可移动抓斗机构,并且可移动抓斗机构可在可伸缩布料机构内穿行,能够将酿酒料在可伸缩布料机构的行程范围内举升或下降,与暂存酿酒料的暂存桶对接,方便快捷地转运酿酒物料,可将暂存桶设置为静态结构,充分利用已有厂房设备,在高效率转运酿酒物料的情况下,大幅度降低设备成本。
附图说明
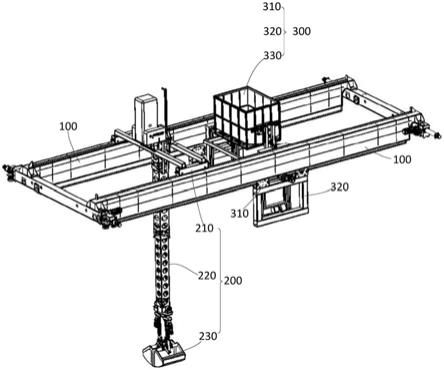
15.图1为本实用新型一实施例中起入窖机器人的立体结构示意图;
16.图2为本实用新型一实施例中起入窖机器人的第一视角平面结构示意图;
17.图3为本实用新型一实施例中起入窖机器人的第二视角平面结构示意图;
18.图4为本实用新型一实施例中转运箱的立体结构示意图。
具体实施方式
19.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的可能的实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文已经通过附图描述的实施例。通过参考附图描述的实施例是示例性的,用于使对本实用新型的公开内容的理解更加透彻全面,而不能解释为对本实用新型的限制。此外,如果已知技术的详细描述对于示出的本实用新型的特征是非必要技术的,则可能将这些技术细节予以省略。
20.相关领域的技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本实用新型所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
21.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本技术的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
22.下面以具体地实施例对本实用新型的技术方案以及该技术方案如何解决上述的技术问题进行详细说明。
23.本实用新型申请提供的起入窖机器人,如图1和图2所示,包括梁式行车100、可移动抓斗机构200、控制器和至少一个伸缩布料机构300,控制器分别与可移动抓斗机构200和伸缩布料机构300电连接。
24.控制器分别与梁式行车100、可移动抓斗机构200和伸缩布料机构300上的驱动部310电连接,实现梁式行车100的运行,可移动抓斗机构200的伸长和收缩,以及抓斗230取放物料的动作,并实现伸缩布料机构300的伸缩和物料转运工作。控制器可通过内部的处理器,控制起入窖机器人上的电气零部件按照预先设定的动作程序运行,从硬件角度而言,处理器可以是cpu(central processing unit,中央处理器),通用处理器,dsp(digital signal processor,数据信号处理器),asic(application specific integrated circuit,专用集成电路),fpga(field-programmable gate array,现场可编程门阵列)或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。其可以实现或执行结合本实用新型公开内容所描述的各种示例性的逻辑方框,模块和电路。处理器也可以是实现计算功能的组合,例如包含一个或多个微处理器组合,dsp和微处理器的组合等。
25.如图1和图2所示,可移动抓斗机构200包括移动部210、第一伸缩架220和抓斗230,移动部210设置在第一伸缩架220的第一端,抓斗230设置在第一伸缩架220的第二端,移动部210可在梁式行车100上移动。可移动抓斗机构200上的移动部210通常带有电机,驱动可移动抓斗机构200整体在梁式行车100上移动,而第一伸缩架220可相对于移动部210伸缩,可伸长从窖池中取料,可收缩将酿酒料转移到其他窖池或者转运设备当中。第一伸缩架220可采用剪式伸缩架,具体的伸缩结构,可参考现有技术中的有关内容。
26.另外,需要说明的是,可移动抓斗机构200中的移动部210是其中能够驱动各个可动作部分的动力机构的总称,由于可直接参考现有技术中的技术内容,本技术未对其进行展开描述,可以预见的,移动部210包括能够使得抓斗230运行的移动部,包括能够驱动第一伸缩架220运行的移动部,还包括能够使可移动抓斗机构200整体移动的移动部,这些移动部的分布位置可能各不相同。
27.如图1所示,伸缩布料机构300包括驱动部310、第二伸缩架320和转运箱330,转运箱330设置在第二伸缩架320上并可在第二伸缩架320上移动,第二伸缩架320连接在驱动部310上并可相对驱动部310移动,驱动部310可在梁式行车100上移动;可移动抓斗机构200可在伸缩布料机构300内穿行。驱动部310可在梁式行车100上沿梁式行车100的长度方向往复移动,第二伸缩架320也可相对于驱动部310移动,也可根据需要固定在某一位置上。第二伸缩架320的长度方向与梁式行车100的长度方向垂直,并且梁式行车100的长度方向往往是水平方向。当储放酿酒料的暂存桶位于起入窖机器人所在的生产车间的天花板上时,第二伸缩架320能够有部分位于梁式行车100上方,更靠近生产车间的天花板,而转运箱330能够在第二伸缩架320上移动,则能够移动到第二伸缩架320的顶端,即最靠近暂存桶的位置,甚至可以设计为与暂存桶对接,能够将暂存桶内的酿酒料直接转移到转运箱330中。
28.与前文描述的移动部类似,伸缩布料机构300中的驱动部310,也包括驱动伸缩布料机构300整体移动的第一驱动部,驱动第二伸缩架320伸缩动作的第二驱动部,还有设置在转运箱330上的至少一个驱动部。
29.如图3所示,将可移动抓斗机构200设置在梁式行车100的宽度方向中间,将伸缩布料机构300则设置在梁式行车100的宽度方向两侧,伸缩布料机构300能够运行到可移动抓斗机构200所在的位置,伸缩布料机构300中的第二伸缩架320能够容纳处于收缩状态的可移动抓斗机构200,也就使得可移动抓斗机构200的抓斗230位于转运箱330正上方,从而转移酿酒料。
30.当然,通过对第一伸缩架220和第二伸缩架320的具体结构设置,也可使得可移动抓斗机构200能够在伸缩布料机构300中穿行,也即可移动抓斗机构200可以与伸缩布料机构300位置重合。将伸缩布料机构300上的转运箱330下降至较低的位置,转运箱330与驱动部310之间空出预留空间,可移动抓斗机构200在自身的移动部210的驱动下,移动到预留空间内,位于转运箱330上方,翻转或打开抓斗230,可将抓斗230内的酿酒料转移到转运箱330内。梁式行车100本身的宽度较大,有足够的空间供可移动抓斗机构200和伸缩布料机构300不冲突地运行。
31.本实用新型提供的起入窖机器人通过在同一梁式行架上设置可举降的可伸缩布料机构300和可伸缩及可移动的可移动抓斗机构200,并且可移动抓斗机构200可在可伸缩布料机构300内穿行,能够将酿酒料在可伸缩布料机构300的行程范围内举升或下降,与暂存酿酒料的暂存桶对接,方便快捷地转运酿酒物料,可将暂存桶设置为静态结构,充分利用已有厂房设备,在高效率转运酿酒物料的情况下,大幅度降低设备成本。
32.可选的,在本实用新型申请一个实施例的某些实现方式中,如图3所示,第二伸缩架320包括层叠的至少两层门架,相邻两层门架可相对移动;最内层的门架的宽度大于可移动抓斗机构200的最大宽度。根据需要,可设置多层门架,相邻两个门架之间可设置滑轮和滑轨结构,并且设置起吊结构,带动门架移动,实现第二伸缩架320的伸长或收缩。门架的镂空宽度需要设置足够大,以供容纳可移动抓斗机构200。
33.可选的,在本实用新型申请另一个实施例的某些实现方式中,如图4所示,伸缩布料机构300还包括连接在第二伸缩架320上的翻斗部340;转运箱330的两个相对的侧端面上均设有一对支撑柱,支撑柱与翻斗部340连接,翻斗部340可驱动转运箱330绕侧端面的法线转动预设角度。转运箱330能够实现倾卸酿酒料的方式还有翻转式。翻斗机构能够带动转运箱330的箱体翻转一定角度,例如翻转180
°
,将转运箱330中的物料全部倾倒到窖池内。
34.可选的,结合上述实现方式,在本实用新型申请另一个实施例的另一些实现方式中,如图4所示,翻斗部340包括连接板块341、旋转盘342和两根同轴且相对的伸缩叉杆343;连接板块341上设有几何中心轴相互垂直的第一连接孔341a和第二连接孔341b,第一连接孔341a和第二连接孔341b至少部分重合;支撑柱可插设在第一连接孔341a内,伸缩叉杆343可插设在第二连接孔341b内;旋转盘342与连接板块341可拆卸连接;旋转盘342的盘面与转运箱330的侧端面平行。第一连接孔341a和第二连接孔341b的孔腔部分重合,并且可以使第二连接孔341b位于第一连接孔341a下方,更靠近转运箱330的底端,在将转运箱330的支撑柱插入到第一连接孔341a之后,再将伸缩叉杆343插入到第二连接孔341b内,可使得支撑柱被伸缩叉杆343抵接甚至顶升,可避免转运箱330沿支撑柱的轴向移动,提高转运箱330的位置稳定性,也保证了转运箱330在需要与其他结构对接时的对接准确性。
35.另外,伸缩叉杆343具体可采用液压装置生产制造,当需要的时候,将伸缩叉杆343装配到第二连接孔341b内,实现转运箱330与翻斗部340连接,也实现转运箱330与第二伸缩架320的连接。
36.可选的,结合上述实现方式,在某些具体实施方式中,旋转盘342通过第三伸缩架(图中未示出)连接在第二伸缩架320上。具体地,第三伸缩架可以采用普通的液压机构,该液压机构与控制器能够实现通信连接,被控制器控制。第三伸缩架可在旋转盘342的盘面法线方向移动,也即在支撑柱的轴向上移动。当然,第三伸缩架跟旋转盘342一一对应,左右两
个旋转盘342上均连接有一个第三伸缩架,能够将转运箱330两侧的连接板块341收缩到靠近第二伸缩架320的位置,使得支撑柱离开第一连接孔341a,使得转运箱330整体从伸缩布料机构300上拆离下来,将转运箱330整体拆解并转移到生产车间的其他位置或设备中时。当然,第三伸缩架也可采用其他形式,比如旋转式,第三伸缩架通过绕一侧旋转轴旋转,脱离与支撑柱的连接。
37.本技术领域技术人员可以理解,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
38.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
39.在本说明书的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
40.以上所述仅是本技术的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1