可直角变道的RGV托载运输车的制作方法
可直角变道的rgv托载运输车
技术领域
1.本发明涉及一种rgv托载运输车,具体是一种可进行直角变道托载运输的rgv托载运输车,属于物流输送技术领域。
背景技术:
2.rgv是有轨制导车辆(rail guided vehicle)的英文缩写,又叫有轨穿梭小车,它可以十分方便地与其他物流系统实现自动连接,如出/入库站台、各种缓冲站、输送机、升降机和机器人等,可以无需人员操作地按照计划速度进行物料的输送,广泛应用于如工厂、仓储物流中心、配送中心等场所进行转运输送物料。
3.传统的rgv托载运输车通常只能沿纵向或横向一个方向运行,若要具有纵横向运行功能往往需要借助专用的转弯道轨或专用回转换轨盘来实现。采用转弯道轨时转弯道轨的转弯半径一般取决于rgv托载运输车前轮组与后轮组之间的轮轴间距、一般较大,因此会造成道轨铺设需额外占用过多的安装空间;而采用具有道轨的回转换轨盘时需将rgv托载运输车停滞在圆盘结构的回转换轨盘上后再启动回转换轨盘进行回转换轨,因此也会造成占用过多的安装空间,同时一方面回转换轨盘需承载rgv托载运输车的整体载荷、需提供较大的回转动力,另一方面,重载情况下rgv托载运输车整体回转换轨的方式存在一定的安全隐患,不仅慢速回转换轨的方式效率较低、而且准确回转制动定位较困难。
技术实现要素:
4.针对上述现有技术存在的问题,本发明提供一种可直角变道的rgv托载运输车,能够在最大限度降低道轨安装空间的前提下实现rgv托载运输车的快速直角变道,特别适用于如工厂、仓储物流中心、配送中心等场所进行转运输送物料。
5.为了实现上述目的,本可直角变道的rgv托载运输车包括车架总成以及安装在车架总成底部的纵向滚动轮组、横向滚动轮组和升降摆臂组件;
6.所述的车架总成整体是中心对称结构、且车架总成的顶部是托载平台结构;
7.所述的纵向滚动轮组包括沿纵向方向前后对称设置的前纵向滚动轮对和后纵向滚动轮对、且前纵向滚动轮对的轮间距和后纵向滚动轮对的轮间距相同设置,至少前纵向滚动轮对或后纵向滚动轮对上设有与前纵向滚动轮对或后纵向滚动轮对传动连接的纵向滚动轮组驱动机构;
8.所述的横向滚动轮组包括沿横向方向前后对称设置的前横向滚动轮对和后横向滚动轮对、且前横向滚动轮对的轮间距和后横向滚动轮对的轮间距相同设置,前横向滚动轮对的滚动中轴线与前纵向滚动轮对的滚动中轴线空间垂直交错设置,至少前横向滚动轮对和后横向滚动轮对上设有与前横向滚动轮对和后横向滚动轮对传动连接的横向滚动轮组驱动机构;
9.所述的升降摆臂组件包括摆臂和安装在摆臂上的摆臂升降控制部件;沿纵向方向前后对置设置、或沿横向方向前后对置设置的两件摆臂的一端分别铰接安装于车架总成,
两件摆臂的另一端分别铰接安装于前纵向滚动轮对和后纵向滚动轮对、或者两件摆臂的另一端铰接安装于前横向滚动轮对和后横向滚动轮对;
10.所述的前横向滚动轮对和后横向滚动轮对分别通过支撑座定位安装在车架总成的底部,或者所述的前纵向滚动轮对和后纵向滚动轮对分别通过支撑座定位安装在车架总成的底部。
11.作为本实用新型制动结构的一种实施方式,可直角变道的rgv托载运输车还包括盘式制动结构,至少前纵向滚动轮对或后纵向滚动轮对上同轴固定设有纵向滚动制动盘,纵向滚动制动钳固定安装在车架总成上、且纵向滚动制动钳的制动钳口对应纵向滚动制动盘的摆动升降方位设置,至少前横向滚动轮对或后横向滚动轮对上同轴设有横向滚动制动盘,横向滚动制动钳固定安装在车架总成上、且横向滚动制动钳的制动钳口卡接在横向滚动制动盘上;
12.或者至少前纵向滚动轮对或后纵向滚动轮对上同轴固定设有纵向滚动制动盘,纵向滚动制动钳固定安装在车架总成上、且纵向滚动制动钳的制动钳口卡接在纵向滚动制动盘上,至少前横向滚动轮对或后横向滚动轮对上同轴设有横向滚动制动盘,横向滚动制动钳固定安装在车架总成上、且横向滚动制动钳的制动钳口对应横向滚动制动盘的摆动升降方位设置。
13.作为本实用新型的优选方案,摆臂升降控制部件是伸缩缸结构,伸缩缸结构的一端铰接安装于车架总成、另一端铰接安装于摆臂。
14.作为本实用新型的进一步改进方案,前纵向滚动轮对和后纵向滚动轮对分别设有轮轴、且纵向滚动轮组驱动机构与前纵向滚动轮对或后纵向滚动轮对的轮轴传动连接;
15.或者前横向滚动轮对和后横向滚动轮对分别设有轮轴、且横向滚动轮组驱动机构与前横向滚动轮对或后横向滚动轮对的轮轴传动连接。
16.作为本实用新型横向滚动轮组的一种设置方式,前横向滚动轮对沿纵向方向设置于前纵向滚动轮对和后纵向滚动轮对的内侧方向。
17.作为本实用新型横向滚动轮组的另一种设置方式,前横向滚动轮对沿纵向方向设置于前纵向滚动轮对和后纵向滚动轮对的外侧方向。
18.与现有技术相比,本可直角变道的rgv托载运输车通过控制两件摆臂升降控制部件的同步伸缩可以实现摆臂同步带动前纵向滚动轮对和后纵向滚动轮对升降(或者摆臂同步带动前横向滚动轮对和后横向滚动轮对升降),进而实现前纵向滚动轮对和后纵向滚动轮对降下时前横向滚动轮对和后横向滚动轮对处于悬空状态(或者前横向滚动轮对和后横向滚动轮对降下时前纵向滚动轮对和后纵向滚动轮对处于悬空状态)、本可直角变道的rgv托载运输车通过纵向滚动轮组跨骑在纵向道轨上(或者本可直角变道的rgv托载运输车通过横向滚动轮组跨骑在横向道轨上),通过控制纵向驱动电机(或横向驱动电机)的动作可以实现驱动本可直角变道的rgv托载运输车沿纵向道轨(或横向道轨)前后移动;需要进行直角变向移动时,控制纵向驱动电机(或横向驱动电机)使本可直角变道的rgv托载运输车停滞在纵向道轨与横向道轨的十字垂直交叉位置、使前横向滚动轮对和后横向滚动轮对处于正对横向道轨上方的位置(或使前纵向滚动轮对和后纵向滚动轮对处于正对纵向道轨上方的位置),然后可以控制摆臂升降控制部件同步缩入实现摆臂同步带动前纵向滚动轮对和后纵向滚动轮对摆动缩入(或者摆臂同步带动前横向滚动轮对和后横向滚动轮对摆动缩
入),本可直角变道的rgv托载运输车即整体降下、并通过横向滚动轮组跨骑在横向道轨上(或通过纵向滚动轮组跨骑在纵向道轨上),即可通过控制横向驱动电机(或纵向驱动电机)的动作实现驱动本可直角变道的rgv托载运输车沿横向道轨(或纵向道轨)前后移动。能够实现整体平移的直角变向,能够在最大限度降低道轨安装空间的前提下实现rgv托载运输车的快速直角变道,特别适用于如工厂、仓储物流中心、配送中心等场所进行转运输送物料。
附图说明
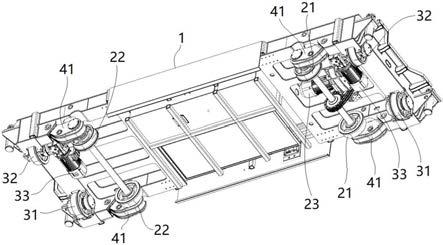
19.图1是本发明顶部视角的三维结构示意图;
20.图2是本发明底部视角的三维结构示意图。
21.图中:1-车架总成,2-纵向滚动轮组,21-前纵向滚动轮对,22-后纵向滚动轮对,23-纵向滚动轮组驱动机构,3-横向滚动轮组,31-前横向滚动轮对,32-后横向滚动轮对,33-横向滚动轮组驱动机构,4-升降摆臂组件,41-摆臂,42-摆臂升降控制部件。
具体实施方式
22.以下结合附图对本发明做进一步说明(以下以图1的左右方向为纵向方向、以水平垂直于纵向方向的方向为横向方向进行描述,以指向车架总成1几何对称中心的方向为内侧方向、以背离车架总成1几何对称中心的方向为外侧方向进行描述)。
23.如图1、图2所示,本可直角变道的rgv托载运输车包括车架总成1以及安装在车架总成1底部的纵向滚动轮组2、横向滚动轮组3和升降摆臂组件4。
24.所述的车架总成1整体是中心对称结构、且车架总成1的顶部是托载平台结构。
25.所述的纵向滚动轮组2包括沿纵向方向前后对称设置的前纵向滚动轮对21和后纵向滚动轮对22、且前纵向滚动轮对21的轮间距和后纵向滚动轮对22的轮间距相同设置,至少前纵向滚动轮对21或后纵向滚动轮对22上设有与前纵向滚动轮对21或后纵向滚动轮对22传动连接的纵向滚动轮组驱动机构23,定位安装在车架总成1上的纵向滚动轮组驱动机构23包括纵向驱动电机。
26.所述的横向滚动轮组3包括沿横向方向前后对称设置的前横向滚动轮对31和后横向滚动轮对32、且前横向滚动轮对31的轮间距和后横向滚动轮对32的轮间距相同设置,前横向滚动轮对31的滚动中轴线与前纵向滚动轮对21的滚动中轴线空间垂直交错设置,前横向滚动轮对31可以沿纵向方向设置于前纵向滚动轮对21和后纵向滚动轮对22的内侧方向(即前横向滚动轮对31的轮间距小于前纵向滚动轮对21与后纵向滚动轮对22之间的轴间距)、或者前横向滚动轮对31可以沿纵向方向设置于前纵向滚动轮对21和后纵向滚动轮对22的外侧方向(即如图2所示、前横向滚动轮对31的轮间距大于前纵向滚动轮对21与后纵向滚动轮对22之间的轴间距),至少前横向滚动轮对31和后横向滚动轮对32上设有与前横向滚动轮对31和后横向滚动轮对32传动连接的横向滚动轮组驱动机构33,定位安装在车架总成1上的横向滚动轮组驱动机构33包括横向驱动电机。
27.所述的升降摆臂组件4包括摆臂41和安装在摆臂41上的摆臂升降控制部件42;沿纵向方向前后对置设置、或沿横向方向前后对置设置的两件摆臂41的一端分别铰接安装于车架总成1,两件摆臂41的另一端分别铰接安装于前纵向滚动轮对21和后纵向滚动轮对22、
或者两件摆臂41的另一端铰接安装于前横向滚动轮对31和后横向滚动轮对32;配合摆臂41数量设置的摆臂升降控制部件42可以是可实现直线往复运动的伸缩缸或配合设置的齿轮齿条结构等结构,摆臂升降控制部件42也可以是可实现周向旋转运动的旋转电机或液压马达等结构,由于伸缩缸结构不仅结构简单、而且便于安装控制,因此摆臂升降控制部件42优选为伸缩缸结构,伸缩缸结构的一端可铰接安装于车架总成1、另一端可铰接安装于摆臂41,通过控制摆臂升降控制部件42的动作可以实现控制摆臂41同步带动前纵向滚动轮对21和后纵向滚动轮对22升降、或者实现控制摆臂41同步带动前横向滚动轮对31和后横向滚动轮对32升降。
28.所述的前横向滚动轮对31和后横向滚动轮对32分别通过支撑座定位安装在车架总成1的底部,或者所述的前纵向滚动轮对21和后纵向滚动轮对22分别通过支撑座定位安装在车架总成1的底部。
29.本可直角变道的rgv托载运输车在使用前,可根据前纵向滚动轮对21的轮间距铺设纵向道轨、根据前横向滚动轮对31的轮间距铺设与纵向道轨垂直的横向道轨,以两件摆臂41分别与前纵向滚动轮对21和后纵向滚动轮对22连接、而前横向滚动轮对31和后横向滚动轮对32定位安装在车架总成1的底部为例,如图2所示,本可直角变道的rgv托载运输车通过纵向滚动轮组2跨骑在纵向道轨上时,摆臂升降控制部件42处于伸出的支撑状态,此时车架总成1的托载平台结构至前纵向滚动轮对21和后纵向滚动轮对22的轮面之间的高度尺寸大于车架总成1的托载平台结构至前横向滚动轮对31和后横向滚动轮对32的轮面之间的高度尺寸,即前横向滚动轮对31和后横向滚动轮对32处于悬空状态,可以通过控制纵向驱动电机的动作实现驱动本可直角变道的rgv托载运输车沿纵向道轨前后移动;需要进行直角变向移动时,控制纵向驱动电机使本可直角变道的rgv托载运输车停滞在纵向道轨与横向道轨的十字垂直交叉位置、使前横向滚动轮对31和后横向滚动轮对32处于正对横向道轨上方的位置,然后可以控制摆臂升降控制部件42同步缩入实现摆臂41同步带动前纵向滚动轮对21和后纵向滚动轮对22摆动缩入,本可直角变道的rgv托载运输车即整体降下、并通过横向滚动轮组3跨骑在横向道轨上,即可通过控制横向驱动电机的动作实现驱动本可直角变道的rgv托载运输车沿横向道轨前后移动。
30.为便于准确控制本可直角变道的rgv托载运输车的启停,可以设置制动装置,制动装置可以是对减速机的动力轴进行制动的抱闸结构、也可以是通过制动钳对制动盘进行制动的盘式制动结构等其他结构,在采用盘式制动结构时,至少前纵向滚动轮对21或后纵向滚动轮对22上同轴固定设有纵向滚动制动盘,纵向滚动制动钳固定安装在车架总成1上、且纵向滚动制动钳的制动钳口对应纵向滚动制动盘的摆动升降方位设置,前纵向滚动轮对21或后纵向滚动轮对22降下时纵向滚动制动盘可卡入纵向滚动制动钳的制动钳口内,至少前横向滚动轮对31或后横向滚动轮对32上同轴设有横向滚动制动盘,横向滚动制动钳固定安装在车架总成1上、且横向滚动制动钳的制动钳口卡接在横向滚动制动盘上;或者至少前纵向滚动轮对21或后纵向滚动轮对22上同轴固定设有纵向滚动制动盘,纵向滚动制动钳固定安装在车架总成1上、且纵向滚动制动钳的制动钳口卡接在纵向滚动制动盘上,至少前横向滚动轮对31或后横向滚动轮对32上同轴设有横向滚动制动盘,横向滚动制动钳固定安装在车架总成1上、且横向滚动制动钳的制动钳口对应横向滚动制动盘的摆动升降方位设置,前横向滚动轮对31或后横向滚动轮对32降下时横向滚动制动盘可卡入横向滚动制动钳的制
动钳口内。
31.为了减化机构设置,作为本实用新型的进一步改进方案,前纵向滚动轮对21和后纵向滚动轮对22分别设有轮轴、且纵向滚动轮组驱动机构23与前纵向滚动轮对21或后纵向滚动轮对22的轮轴传动连接;或者前横向滚动轮对31和后横向滚动轮对32分别设有轮轴、且横向滚动轮组驱动机构33与前横向滚动轮对31或后横向滚动轮对32的轮轴传动连接。通过设置轮轴的方式可以实现简化传动连接结构的同时保证滚动轮对转动的同步性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1