一种视觉分析剔除装置的制作方法
1.本实用新型涉及茶叶生产设备技术领域,具体涉及一种视觉分析剔除装置。
背景技术:
2.在茶叶生产过程中,最后的工序通常是对茶叶进行视觉分析剔除,即对茶叶进行视觉分析并剔除外观不合格的茶叶,因此,视觉分析剔除装置往往设置在茶叶生产线最后的位置上,然而由于茶叶种类繁多,不同种类的茶叶生产工艺不同,所需的生产机器也不同,虽然最后的工序都是对茶叶进行视觉分析剔除,但视觉分析剔除工序的前道工序是随着茶叶种类的变化而变化的,因此,视觉分析剔除装置所衔接的前道工序的生产装置也随着茶叶种类的变化而各不相同,而不同种类的生产机器上输送带的高度是不同的,为了能与不同的输送带高度进行匹配,传统的视觉分析装置设计了不同的高度系列进行匹配,虽然通过不同的系列设置解决了不同的输送带高度的匹配问题,但在实际生产过程中,当产线产品工艺由于升级改造更换为其他种类的生产机器时,视觉分析剔除工序的前道工序生产装置的输送带高度就无法与旧视觉分析剔除装置匹配,导致旧视觉分析剔除装置的闲置,增加了工艺升级改造的成本。
技术实现要素:
3.为了解决上述技术问题,本实用新型提供一种视觉分析剔除装置,通过在输送带下方设置升降调节机构,解决了不同的输送带高度的匹配问题,一方面提升了视觉分析剔除装置的通用性,另一方面降低了视觉分析剔除工艺的升级改造成本。
4.本实用新型的技术方案如下:
5.一种视觉分析剔除装置,包括移动支架、升降调节机构、输送带、相机、机械手以及吸尘器,所述升降调节机构设置于所述移动支架底部,所述输送带设置在所述升降调节机构上,在所述移动支架顶部沿所述输送带输送方向依次设置有所述相机和所述机械手,所述吸尘器设置于所述机械手顶部。
6.进一步地,所述升降调节机构包括电动伸缩杆、输送带支撑杆、连接于输送带支撑杆两侧的滑块以及与滑块配套的直线导轨,所述输送带支撑杆设置于所述电动伸缩杆顶部,所述输送带支撑杆通过所述滑块沿着所述直线导轨方向上下移动。
7.进一步地,所述输送带包括进料端、出料端以及设置于输送带一侧的输送电机,在所述输送带的所述进料端和所述出料端下方各设置一个所述升降调节机构。
8.进一步地,所述相机包括视觉调整杆,所述视觉调整杆固定于移动支架的顶部,相机设置于视觉调整杆靠近输送带的一端,所述相机还包括视觉处理系统,所述视觉处理系统用于生成不合格茶叶位置信息,并将所述不合格茶叶位置信息传输给所述机械手。
9.进一步地,所述机械手包括机械臂以及安装板,所述安装板固定于所述移动支架的顶部,所述机械手通过安装板吊接在移动支架上。
10.进一步地,所述机械手是液压式机械手、电动式机械手、气动式机械手、机械式机
械手中的任意一种或几种。
11.进一步地,所述吸尘器包括吸头,所述吸头固定于所述机械臂的末端。
12.进一步地,所述移动支架包括若干万向轮,所述万向轮设置于所述移动支架底端。
13.本实用新型具有如下有益效果:
14.1、本实用新型通过在输送带下方设置升降调节机构,解决了不同的输送带高度的匹配问题,一方面提升了视觉分析剔除装置的通用性,另一方面降低了视觉分析剔除工艺的升级改造成本。
15.2、本实用新型采用机械手与吸尘器作为剔除工具对不合格茶叶进行剔除,自动化程度高,剔除的精度与速度都有了明显地提升。
16.3、本实用新型的升降调节机构结构简单,生产成本低廉,利于批量化生产。
附图说明
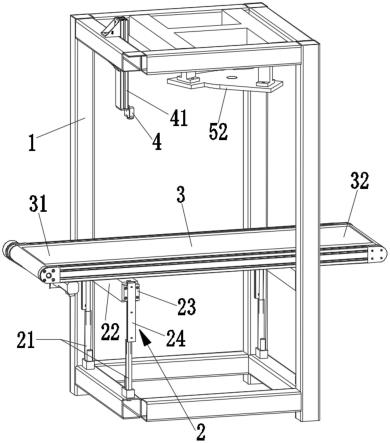
17.附图1是本实用新型的视觉分析剔除装置的第一视角结构示意图;
18.附图2是本实用新型的视觉分析剔除装置的第二视角结构示意图;
19.附图3是本实用新型的视觉分析剔除装置的第三视角结构示意图;
20.附图4是附图3中a处的局部放大图。
21.1、移动支架;11、万向轮;2、升降调节机构;21、电动伸缩杆;22、输送带支撑杆;23、滑块;24、直线导轨;3、输送带;31、进料端;32、出料端;33、输送电机;4、相机;41、视觉调整杆;42、视觉处理系统;5、机械手;51、机械臂;52、安装板;6、吸尘器;61、吸头。
具体实施方式
22.下面结合附图和具体实施例来对本实用新型进行详细的说明。
23.参见图1-4,视觉分析剔除装置包括移动支架1、升降调节机构2、输送带3、相机4、机械手5以及吸尘器6,升降调节机构2设置于移动支架1底部,输送带3设置在升降调节机构2上,在移动支架1顶部沿输送带3输送方向依次设置有相机4和机械手5,吸尘器6设置于机械手5顶部。
24.进一步地,所述移动支架1包括若干万向轮11,所述万向轮11设置于移动支架1底端。
25.进一步地,所述升降调节机构2包括电动伸缩杆21、输送带支撑杆22、连接于输送带支撑杆22两侧的滑块23以及与滑块23配套的直线导轨24,输送带支撑杆22设置于电动伸缩杆21顶部,所述输送带支撑杆22通过滑块23沿着直线导轨24方向上下移动。
26.进一步地,所述输送带3包括进料端31、出料端32以及设置于输送带3一侧的输送电机33,在输送带3的进料端31和出料端32下方各设置一个升降调节机构2,通过合理设置两个升降调节机构2的伸缩高度,可用于调节输送带3的倾斜程度,也可用于衔接前后工序中不同输送高度的生产装置。
27.进一步地,所述相机4包括视觉调整杆41,所述视觉调整杆41固定于移动支架1的顶部,相机4设置于视觉调整杆41靠近输送带3的一端,所述相机4还包括视觉处理系统42(未图示),工作时,所述相机4将捕获的图像实时输送到视觉处理系统42中,通过视觉处理系统42分析茶叶图像中的信息数据,生成不合格茶叶位置信息,最终将不合格茶叶的位置
信息传输给所述机械手5。
28.进一步地,所述机械手5包括机械臂51以及安装板52,安装板52固定于移动支架1的顶部,机械手5通过安装板52吊接在移动支架1上。
29.进一步地,所述机械手5可以是液压式机械手、电动式机械手、气动式机械手或机械式机械手。
30.进一步地,所述吸尘器6包括吸头61,吸头61固定于所述机械臂51的末端,用于吸走不合格的茶叶。
31.本实用新型使用过程与工作原理:
32.将该视觉分析剔除装置移动至相应的工序生产位置,根据所衔接的前后工序生产装置的茶叶输送高度调整视觉分析剔除装置的输送带3的工作高度。调整时,若输送带3下仅设置一个升降调节机构2,则由电动伸缩杆21通过输送带支撑杆22带动输送带3进行上下移动,电动伸缩杆21伸缩范围决定了输送带3的高度变化范围;若升降调节机构2分别设置于输送带3的进料端31和出料端32的下方,则升降调节机构2不仅能调节输送带3的高度,还可调节输送带3的倾斜程度,并用于衔接前后工序中不同输送高度的生产装置,扩展了视觉分析剔除装置的应用范围。当设置好输送带3的工作高度后,输送带3的进料端31接收来自前道生产工序的输送的茶叶,茶叶的图像由相机4实时输送到视觉处理系统42中,视觉处理系统42采集分析茶叶图像中的信息数据,并生成不合格茶叶的位置信息,所述位置信息即时传输至机械手5,机械手5根据所述位置信息通过机械臂51带动吸头61移动到输送带3上不合格茶叶的位置,吸尘器6通过吸头61将不合格茶叶吸走,从而完成对不合格茶叶的剔除工作。
33.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1