一种用于料箱搬运机器人的底盘的制作方法
1.本实用新型涉及智能物流技术领域,具体而言,涉及一种用于料箱搬运机器人的底盘。
背景技术:
2.智能物流是利用条形码、射频识别技术、传感器、全球定位系统等先进的物联网技术通过信息处理和网络通信技术平台广泛应用于物流业运输、仓储、配送、包装、装卸等基本活动环节,实现货物运输过程的自动化运作和高效率优化管理,提高物流行业的服务水平,降低成本,减少自然资源和社会资源消耗。物联网为物流业将传统物流技术与智能化系统运作管理相结合提供了一个很好的平台,进而能够更好更快地实现智能物流的信息化、智能化、自动化、透明化、系统的运作模式。智能物流在实施的过程中强调的是物流过程数据智慧化、网络协同化和决策智慧化。
3.料箱自动搬运是智能物流系统中的重要环节,参考公开号为cn109748027a,名称是“一种物料箱自动拣选机器人及其控制方法”的发明专利申请,就公开了一种料箱自动搬运机器人。然而,现有的料箱自动搬运机器人存在以下技术缺陷:机器人的底盘安全性较低,运行稳定性差、可靠性差。
技术实现要素:
4.本实用新型就是为了解决现有料箱自动搬运机器人中底盘安全性较低,运行稳定性差、可靠性差的技术问题,提供一种提高安全性,提高稳定性、可靠性的用于料箱搬运机器人的底盘。
5.本实用新型提供的用于料箱搬运机器人的底盘,包括底座、外壳、充电板、第一激光雷达、第二激光雷达、电池、主控电路板、第一驱动轮模块、第二驱动轮模块和脚轮,底座设有脚轮安装部、第一激光雷达安装部、第二激光雷达安装部、第一立柱安装部和第二立柱安装部,底座的前部和后部分别连接有防撞条,外壳与底座连接,外壳的两侧分别连接有声波传感器,充电板与底座的前部连接,第一激光雷达与第一激光雷达安装部连接,第二激光雷达与第二激光雷达安装部连接,第一激光雷达位于agv底盘的前部,第二激光雷达位于agv底盘的后部,电池与底座连接,主控电路板与底座连接,第一驱动轮模块和第二驱动轮模块与底座中部的两侧连接,脚轮与脚轮安装部连接,有四个脚轮;底座上的脚轮安装部有四个。
6.优选地,底座的前部和后部分别连接有防撞条。
7.本实用新型的有益效果是,agv底盘运行稳定性好、可靠性好;agv底盘距离地面高度小,使整个机器人运动稳定。agv底盘安全性较高,防撞条的设置能够在偶然发生碰撞别的物体或人员使提供缓冲,提高安全性。当agv底盘带动整个机器人运动时,由于地面不平或紧急情况刹车等原因而产生立柱晃动所造成的力转移到底盘上,晃动幅度小,进一步提高小车运动时的平稳性。定位准确。前后两个激光雷达实现全方位避障功能。
8.本实用新型进一步的特征和方面,将在以下参考附图的具体实施方式的描述中,得以清楚地记载。
附图说明
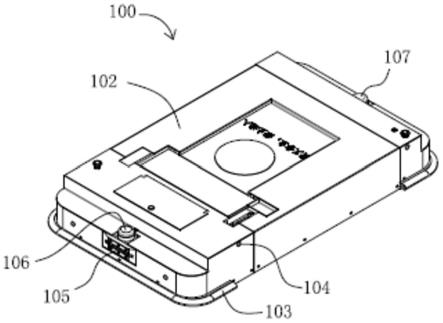
9.图1是agv搬运机器人的轴测图;
10.图2是agv搬运机器人的主视图;
11.图3是agv搬运机器人的左视图;
12.图4是agv搬运机器人的俯视图;
13.图5是图5中agv底盘的结构示意图;
14.图6是图5所示agv底盘的主视图;
15.图7是图5所示agv底盘的俯视图;
16.图8是图5所示agv底盘的左视图;
17.图9是图5所示agv底盘去掉外壳后的结构示意图;
18.图10是图9所示结构的俯视图;
19.图11是图9所示结构的主视图;
20.图12是图1所示升降装置的结构示意图。
21.图中符号说明:
22.100.agv底盘,101.底座,101-1.外壳安装孔,101-2.脚轮安装部,101-3.第二激光雷达安装部,101-4.第一激光雷达安装部,101-5.第一立柱安装部,101-6.第二立柱安装部,102.外壳,103.防撞条,104.声波传感器,105.充电板,106.第一激光雷达,107.第二激光雷达,108.电池,109.主控电路板,110.第一驱动轮模块,111.第二驱动轮模块,114.脚轮;200.升降装置,201.升降驱动电机,202.减速机,203.第一立柱,204.第二立柱,205.第一立柱固定座,206.第二立柱固定座,207.转轴,208.第一从动同步带轮,209.第一主动同步带轮,210.第一下同步带轮,211.第二下同步带轮,212.第一上同步带轮,213.第二上同步带轮,214.第一竖直同步带,215.第二竖直同步带,229.第一同步带轮安装架,230.第二同步带轮安装架,300.抱叉装置。
具体实施方式
23.以下参照附图,以具体实施例对本实用新型作进一步详细说明。
24.如图1-4所示,agv搬运机器人包括agv底盘100、升降装置200、抱叉装置300、托板400。agv底盘100用于按照预设的路线移动,从而使整个机器人移动到需要取放料箱的位置。抱叉装置300用于取放货架上的料箱。升降装置200与agv底盘100连接,升降装置200可以采用现有技术的结构。抱叉装置300安装在与升降装置200上,托板400与升降装置200的两个立柱固定连接,多个托板400沿竖直方向分布,图中显示有五个托板从而形成五层结构。
25.如图5-11所示,agv底盘100包括底座101、外壳102、防撞条103、声波传感器104、充电板105、第一激光雷达106、第二激光雷达107、电池108、主控电路板109、第一驱动轮模块110、第二驱动轮模块111、脚轮114,底座101设有外壳安装孔101-1、脚轮安装部101-2、第二激光雷达安装部101-3、第一激光雷达安装部101-4、第一立柱安装部101-5、第二立柱安装
部101-6,用螺钉将外壳102的边缘连接在外壳安装孔101-1上,底座101的前部和后部分别安装防撞条103,外壳102的两侧均安装了声波传感器104,充电板105安装在底座101的前部,第一激光雷达106安装在第一激光雷达安装部101-4上,第二激光雷达107安装在第二激光雷达安装部101-3上,第一激光雷达106位于agv底盘100的前部,第二激光雷达107位于agv底盘100的后部,电池108安装在底座101上,主控电路板109安装在底座101上,第一驱动轮模块110和第二驱动轮模块111安装在底座101中部的两侧,四个脚轮114分别安装在四个脚轮安装部101-2上。第一驱动轮模块110和第二驱动轮模块111是现有技术的常规零件,第一驱动轮模块110和第二驱动轮模块111中的驱动轮是主动轮(使整个agv底盘100移动),四个脚轮114是从动轮。充电板105用于给电池108充电,主控电路板109控制第一驱动轮模块110、第二驱动轮模块111、第一激光雷达106、第二激光雷达107、声波传感器104工作。第一激光雷达106和第二激光雷达107用于规划agv底盘100的行走路径,还能够测量与障碍物的距离实现避障功能。声波传感器104用于定位,定位精度高,可达厘米级,而且稳定不容易受外界干扰。声波传感器104具体可以选择超声波传感器等。进一步,定位功能还可以通过声波定位、激光定位和读码定位三种复合定位方式,有效降低了环境对agv运行的干扰。
26.agv底盘100的重量大,距离地面高度小,使整个机器人运动稳定。驱动轮模块具有减震装置,四个脚轮114是四个万向轮提供支撑。agv底盘100在刹车情况下稳定性也较好。升降装置200的两个立柱固定安装在立柱安装部上,当agv底盘100带动整个机器人运动时,由于地面不平或紧急情况刹车等原因而产生立柱晃动所造成的力转移到底盘上,晃动幅度小,进一步提高小车运动时的平稳性。
27.如图10和12所示,升降装置200包括升降驱动电机201、减速机202、第一主动同步带轮209、转轴207、第一从动同步带轮208、第一立柱203、第二立柱204、第一立柱固定座205、第二立柱固定座206、第一下同步带轮210、第二下同步带轮211、第一上同步带轮212、第二上同步带轮213、第一竖直同步带214、第二竖直同步带215、如图10所示,升降驱动电机201和减速机202固定安装在agv底盘100的底座101上(升降驱动电机201和减速机202位于底座101的中部),用螺钉将第一立柱固定座205固定安装在底座101的第一立柱安装部101-5,用螺钉将第二立柱固定座206固定安装在底座101的第二立柱安装部101-6。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1