一种砌块搬运机器人的转向升降机构的制作方法
1.本实用新型涉及砌块搬运设备技术领域,具体为砌块搬运机器人的转向升降机构。
背景技术:
2.机器人作为一种具备一些与人或者生物相似能力的自动化设备,例如感知、动作、规划、协同等,随着工业的不断发展,很多要求人进行不断重复劳作的工作岗位,长时间的重复性工作极易导致安全事故的发生,而且生产效率低;而针对这种操作简单、重复性高的社会生产需求,机器人在工业生产中得到了广泛的应用。
3.搬运机器人是可以进行自动化搬运的机器人。它能通过编程完成一些既定的任务,比如将物件从一个加工位置搬至另一加工位置,机器人搬运应用于制砖生产过程中极大程度上减轻了人工的繁重体力劳作,大大提高了场所空间利用率,特别是高度空间的压缩极大地提高了砖坯蒸养效果,降低了能源消耗,具有广阔的应用前景。
4.目前,在制砖生产过程中,压制好的成品砖需要机械手或叉车将其转运到指定堆放区,在指定堆放区的砖坯蒸养后,再用机械手或叉车将其转运到指定码垛区,装卸运输带比较麻烦,在机械手夹持和叉车转运过程中砖坯容易破损,并且需要的场地较大,特别是通道占用空间较大,整个生产线不够紧凑、占地面积大。并且由于叉车高度导致砖坯蒸养上部空间较大,砖在下部蒸养效果差,造成极大的蒸汽浪费。
5.公开号为cn111674858a的专利公开了一种通道窑砌块输出系统,从前向后依次包括砌块输出架、搬运架、若干设置在通道窑内的砌块养护架、至少两个可升降搬运车、控制装置;砌块输出架包括砌块输出架架体、第一纵向轨道对、第二纵向轨道对;砌块养护架包括砌块养护架架体、第四纵向轨道对、第五纵向轨道对;搬运架包括横向轨道对,横向轨道对上设有横向摆渡车,横向摆渡车上安装有由两第三纵向轨道组成的第三纵向轨道对;两第三纵向轨道的间距与两第二纵向轨道的间距相同,两第三纵向轨道的顶面与两第二纵向轨道的顶面平齐。该技术的突出缺陷是:可升降搬运车只有升降功能,没有转向功能。可升降搬运车纵向移动需要导轨,而砌块养护架纵向长度很长且数量众多,下方需要设置轨道对长度一般数十米、数量多,投资巨大。由于养护室内养护温度高于室温,长期处于养护、卸货,再养护、再卸货的环境,养护室内的轨道对长度一般数十米,极容易变形,造成小车在其上运行困难,耗能比较高等。
技术实现要素:
6.本实用新型的目的在于,针对现有技术的不足,提供一种砌块搬运机器人的转向升降机构,其具有纵向移动不需要导轨的特点,极大地节省了投资。
7.本实用新型采用的技术方案如下。
8.一种砌块搬运机器人的转向升降机构,砌块搬运机器人包括机架,机架上设有蓄电池:转向升降机构包括升降装置、安装在液压升降装置的底端的底架、安装在底架的若干
纵向滚轮及若干导向轮、纵向运动驱动装置、导向轮旋转驱动装置;各导向轮或纵向滚轮与纵向运动驱动装置相连,各导向轮与导向轮旋转驱动装置相连。
9.作为优选技术方案,所述纵向滚轮、导向轮均为非金属轮。
10.作为优选技术方案,底架安装有两纵向滚轮、一导向轮;两纵向滚轮中轴线在同一横向直线上,导向轮位于两纵向滚轮的前侧或后侧。
11.作为优选技术方案,各纵向滚轮分别安装在一横向设置的纵向滚轮安装轴上,纵向滚轮安装轴的左、右两端各铰接有垂直于纵向滚轮安装轴中轴线的纵向滚轮转板;各纵向滚轮转板的远离纵向滚轮安装轴端通过第四横向铰接轴与纵向连杆铰接;各纵向连杆的远离纵向滚轮转板端与垂直于纵向滚轮安装轴中轴线的导向轮转板铰接。
12.导向轮转板的远离纵向滚轮转板端铰接有转动板,两转动板通过横板相连,横板上垂向套装有液压升降装置;液压升降装置的底端连接有导向轮轴;导向轮轴上设有导向轮。
13.所述纵向运动驱动装置设置在导向轮轴上,或者,
14.两纵向滚轮安装轴通过联动杆相连,纵向运动驱动装置与联动杆相连,纵向运动驱动装置安装在一纵向滚轮安装轴上,或者,
15.两纵向滚轮安装轴通过联动杆相连,纵向运动驱动装置安装在联动杆上;
16.两导向轮转板通过第二横向铰接轴与机架的底端铰接且第二横向铰接轴位于两导向轮转板的前、后两端之间;与纵向滚轮安装轴相连两纵向滚轮转板通过第四横向铰接轴与机架的底端铰接且第四横向铰接轴位于所述两纵向滚轮转板的前、后两端之间;
17.导向轮旋转驱动装置包括设置在升降装置的径向外周表面上被动齿轮,导向轮旋转驱动装置安装在横板上,导向轮旋转驱动装置设有可与被动齿轮相啮合的主动齿轮。
18.作为优选技术方案,各纵向连杆同导向轮转板通过第三横向铰接横铰接,向轮转板通过第五横向铰接轴与转动板铰接。
19.作为优选技术方案,所述升降装置为电动升降机,导向轮旋转驱动装置为旋转驱动电机,纵向运动驱动装置为导向轮轴驱动电机;电动升降机、旋转驱动电机、导向轮轴驱动电机通过线路与蓄电池相连。
20.作为优选技术方案,砌块搬运机器人上设有液压泵站,液压泵站上设有液压泵;液压泵通过线路与蓄电池相连;
21.所述升降装置为液压升降油缸,导向轮旋转驱动装置为旋转驱动液压马达,纵向运动驱动装置为导向轮轴驱动液压马达,液压升降油缸、旋转驱动液压马达、导向轮轴驱动液压马达通过管路与液压泵相连,或者,
22.所述升降装置为液压升降油缸,导向轮旋转驱动装置为旋转驱动电机,纵向运动驱动装置为导向轮轴驱动液压马达,液压升降油缸、导向轮轴驱动液压马达通过管路与液压泵相连,旋转驱动电机通过线路与蓄电池相连,或者,
23.所述升降装置为液压升降油缸,导向轮旋转驱动装置为旋转驱动液压马达,纵向运动驱动装置为导向轮轴驱动电机,液压升降油缸、旋转驱动液压马达通过管路与液压泵相连,导向轮轴驱动电机通过线路与蓄电池相连,或者,
24.所述升降装置为液压升降油缸,导向轮旋转驱动装置为旋转驱动电机,纵向运动驱动装置为导向轮轴驱动电机,液压升降油缸通过管路与液压泵相连,旋转驱动电机、导向
轮轴驱动电机通过线路与蓄电池相连。
25.作为优选技术方案,横板上设有轴承,升降装置安装在轴承上。
26.作为优选技术方案,两纵向运动滚轮沿导向轮的形心对称分布。
27.作为优选技术方案,两纵向运动滚轮的形心连线与导向轮的形心之间的间距不小于砌块搬运机器人纵向长度的三分之二。
28.本实用新型相比现有技术的有益效果是:当升降装置伸长时,导向轮转板转动,纵向连杆逆时针转动,纵向滚轮运动到纵向连杆下方,实现纵向滚轮、导向轮伸出机架以外与地面接触,并使横向滚轮不与地面接触。采用组合杠杆实现纵向滚轮和导向轮的升降同步、同步运动,升降高度平衡一致,比较稳定。将砌块搬运机器人的升降功能与转向功能合为一体,当砌块搬运机器人进入两纵向架片时,通过升降可以将两架片上的砌块托板抬起或放下,实现装载或卸料功能,通过转向升降机构的转向功能,可以在两纵向架片之间运动而不需要纵向导轨,大大节省了投资。采用非金属轮,运行起来对地面的损伤较小。
附图说明
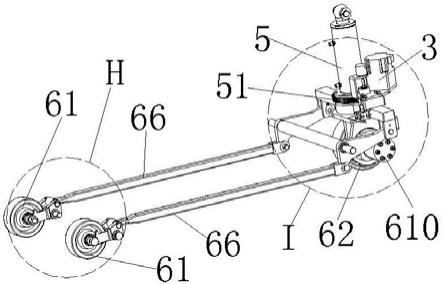
29.图1是本实用新型砌块搬运机器人的转向升降机构一较佳实施例的结构示意图。
30.图2是图1的a部分的局部放大图。
31.图3是图2的c部分的局部放大图。
32.图4是图1的b部分的局部放大图。
33.图5是图4的d部分的局部放大图。
34.图6是图5的e部分的局部放大图。
35.图7是图1所示砌块搬运机器人的仰视图。
36.图8是图7的f部分的局部放大图。
37.图9是图7的g部分的局部放大图。
38.图10是底架与纵向运动驱动装置一种连接结构的示意图。
39.图11是图10的h部分的局部放大图。
40.图12是图10的i部分的局部放大图。
41.图13是图1所示砌块搬运机器人的转向升降机构一状态图。
42.图14是底架与纵向运动驱动装置一种连接结构的示意图。
43.图15是图14的j部分的局部放大图。
44.图16是图14的k部分的局部放大图。
45.图17是本实用新型砌块搬运机器人的转向升降机构一较佳实施例的结构示意图。
46.图18是本实用新型砌块搬运机器人的转向升降机构应用场景示意图。
47.图19是图18的l部分的局部放大图。
48.图20是底架与纵向运动驱动装置一种连接结构的示意图。
49.图21是底架与纵向运动驱动装置一种连接结构的示意图。
50.图22是底架与纵向运动驱动装置一种连接结构的示意图。
51.图23是图12的m部分的局部放大图。
52.其中:机架-1;液压泵站-2;液压泵-21;导向轮旋转驱动装置-3;主动齿轮-31;蓄电池-4;升降装置-5;被动齿轮-51;
53.底架-6;纵向滚轮-61;导向轮-62;纵向滚轮安装轴-63;纵向滚轮转板-64;第一横向铰接轴-65;纵向连杆-66;导向轮转板-67;横板-68;导向轮轴-69;纵向运动驱动装置-610;联动杆-611;第四横向铰接轴-612;第二横向铰接轴-613;转动板-614;第五横向铰接轴-615;第三横向铰接横-616;轴承-617;
54.纵向架片-7;砌块托板-8;砌块-9。
具体实施方式
55.下面,结合附图和实施例对本实用新型作进一步说明。
56.实施例1。如图1-13、23所示,一种砌块搬运机器人的转向升降机构,砌块搬运机器人包括机架1,机架1上设有蓄电池4,其特征在于:转向升降机构包括升降装置5、安装在液压升降装置5的底端的底架6、安装在底架6的若干纵向滚轮61及若干导向轮62、纵向运动驱动装置610、导向轮旋转驱动装置3;各导向轮62或纵向滚轮61与纵向运动驱动装置610相连,各导向轮62与导向轮旋转驱动装置3相连。
57.所述纵向滚轮61、导向轮62均为非金属轮。
58.底架6安装有两纵向滚轮61、一导向轮62;两纵向滚轮61中轴线在同一横向直线上,导向轮62位于两纵向滚轮61的前侧。
59.各纵向滚轮61分别安装在一横向设置的纵向滚轮安装轴63上,纵向滚轮安装轴63的左、右两端各铰接有垂直于纵向滚轮安装轴63中轴线的纵向滚轮转板64;各纵向滚轮转板64的远离纵向滚轮安装轴63端通过第四横向铰接轴612与纵向连杆66铰接;各纵向连杆66的远离纵向滚轮转板64端与垂直于纵向滚轮安装轴63中轴线的导向轮转板67铰接。
60.导向轮转板67的远离纵向滚轮转板64端铰接有转动板614,两转动板614通过横板68相连,横板68上垂向套装有液压升降装置5;液压升降装置5的底端连接有导向轮轴69;导向轮轴69上设有导向轮62;
61.所述纵向运动驱动装置610设置在导向轮轴69上。
62.两导向轮转板67通过第二横向铰接轴613与机架1的底端铰接且第二横向铰接轴613位于两导向轮转板67的前、后两端之间;与纵向滚轮安装轴63相连两纵向滚轮转板64通过第四横向铰接轴612与机架1的底端铰接且第四横向铰接轴612位于所述两纵向滚轮转板64的前、后两端之间;
63.导向轮旋转驱动装置3包括设置在升降装置5的径向外周表面上被动齿轮51,导向轮旋转驱动装置3安装在横板68上,导向轮旋转驱动装置3设有可与被动齿轮51相啮合的主动齿轮31。
64.各纵向连杆66同导向轮转板67通过第三横向铰接横616铰接,向轮转板67通过第五横向铰接轴615与转动板614铰接。
65.砌块搬运机器人上设有液压泵站2,液压泵站2上设有液压泵21;液压泵21通过线路与蓄电池4相连。
66.所述升降装置5为液压升降油缸,导向轮旋转驱动装置3为旋转驱动电机,纵向运动驱动装置610为导向轮轴驱动电机,液压升降油缸通过管路与液压泵21相连,旋转驱动电机、导向轮轴驱动电机通过线路与蓄电池4相连。
67.实施例2。如图14-16所示,本实施例与实施例1的不同在于:两纵向滚轮安装轴63
通过联动杆611相连,纵向运动驱动装置610与联动杆611相连,纵向运动驱动装置610安装在一纵向滚轮安装轴63上。
68.所述升降装置5为液压升降油缸,导向轮旋转驱动装置3为旋转驱动电机,纵向运动驱动装置610为导向轮轴驱动液压马达,液压升降油缸、导向轮轴驱动液压马达通过管路与液压泵21相连,旋转驱动电机通过线路与蓄电池4相连。
69.实施例3。如图17所示,本实施例与实施例1的不同在于:砌块搬运机器人上不设有液压泵站2;所述升降装置5为电动升降机,导向轮旋转驱动装置3为旋转驱动电机,纵向运动驱动装置610为导向轮轴驱动电机;电动升降机、旋转驱动电机、导向轮轴驱动电机通过线路与蓄电池4相连。本实施例适用于砌块搬运机器人搬运砌块重量在1.5吨以下的情况下使用。
70.实施例4。如图20所示,本实施例与实施例1的不同在于:所述升降装置5为液压升降油缸,导向轮旋转驱动装置3为旋转驱动电机,纵向运动驱动装置610为导向轮轴驱动电机,液压升降油缸通过管路与液压泵21相连,旋转驱动电机、导向轮轴驱动电机通过线路与蓄电池4相连。
71.实施例5。如图21所示,本实施例与实施例1的不同在于:所述升降装置5为液压升降油缸,导向轮旋转驱动装置3为旋转驱动液压马达,纵向运动驱动装置610为导向轮轴驱动液压马达,液压升降油缸、旋转驱动液压马达、导向轮轴驱动液压马达通过管路与液压泵21相连.
72.实施例6。如图22所示,本实施例与实施例1的不同在于:所述升降装置5为液压升降油缸,导向轮旋转驱动装置3为旋转驱动液压马达,纵向运动驱动装置610为导向轮轴驱动电机,液压升降油缸、旋转驱动液压马达通过管路与液压泵21相连,导向轮轴驱动电机通过线路与蓄电池4相连。
73.以上所列举的实施方式仅供理解本实用新型之用,并非是对本实用新型所描述的技术方案的限定,有关领域的普通技术人员,还可以作出多种变化或变形,所有等同的变化或变形都应涵盖在本实用新型的保护范围之内。本实用新型未详述之处,均为本技术领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1