一种物料升降平台的制作方法
1.本实用新型涉及服装相关的设备制造领域,具体而言,涉及一种物料升降平台。
背景技术:
2.随着科技的快速发展,机器人应用越来越广泛。机器人代替人工进行物料与货品的位移运动,主要包含以下要素:机器人、物料与货品、起始位置、终止位置这4个要素。其中机器人、物料与货品这两个要素是提供位移服务的主体与被位移服务的客体,一旦确定在整个位移过程具有唯一性,不会改变。但是起始位置与终止位置这两个要素,在整个物料与货品的位移服务过程中是存在变化的,且随着数量与时间变化。为了实现物料与货品的在起始位置或终止位置的位移精确,机器人在执行每次搬运动作都要花费时间与效能进行计算与感应后才能实现精确的抓取与摆放物料与货品,不符合机器人对物料与货品进行位移工作的高效与低碳环保要求。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种物料升降平台,以解决现有技术中机器人对物料与货品进行位移服务过程中存在的因物料与货品的起始位置与终止位置变化而花费时间与效能进行计算位置的问题。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种物料升降平台,包括主体机构和控制装置,所述主体机构包括用于放置物料或货品的放置平台、带动所述放置平台移动的升降部件以及为所述升降部件提供升降动力的动力部件,控制装置用于检测感应所述放置平台的位置,并通过所述升降部件控制所述放置平台的升降移动至所述放置平台处于预设位置区间内。实现了对放置平台和物料位置的精确监测,使得物料的位置满足机器人抓取物料的精度要求,省略机器人对物料位置的计算与感应程序。
6.进一步的,所述控制装置包括位置感应系统、控制系统、物料上限位置和物料下限位置,所述位置感应系统设置在所述放置平台的附近边缘或周围,用于感应所述放置平台的位置,所述位置感应系统与所述控制系统电连接,所述控制系统根据位置所述位置感应系统感应到的放置平台的位置信号控制所述动力部件与所述升降部件的工作。
7.进一步的,所述主体机构的上部还设置有取放装置,所述取放装置包括机器人和取放部件,所述取放部件设置在所述机器人的下部,用于取放放置在所述放置平台上的物料。
8.进一步的,所述位置感应系统的感应元件类型设置为光对射发射接收类、光发送反射接收类、电磁感应类中的至少一种。
9.进一步的,所述主体机构还包括机座,所述机座设置在底部,用于支撑所述放置平台和升降部件。
10.进一步的,所述升降部件设置在所述放置平台与机座之间,所述升降部件用于连
接所述放置平台和机座。
11.进一步的,所述动力部件与所述升降部件连接,所述动力部件用于驱动所述升降部件的上升和下降。
12.进一步的,在物料升降平台的上部还设置有配套的取放装置,所述取放装置包括机器人和取放部件,所述取放部件设置在所述机器人的下部,用于取放放置在所述放置平台上的物料。
13.相对于现有技术,本实用新型所述的物料升降平台具有以下优势:
14.通过主体机构与控制装置的配合,将物料的位置精确化,使得物料的位置满足机器人在固定位置进行抓取物料的精度要求,不需要机器人对物料的位置计算与检测,简化机器人的运行程序与动作,提升机器人对物料的位移服务效率,实现了机器人运行节能高效、低碳环保要求,具有直接的经济价值与社会价值。
附图说明
15.图1为本实用新型实施例所述的物料处于d区域的升降平台示意图;
16.图2为本实用新型实施例所述的物料处于d区域以下的升降平台示意图;
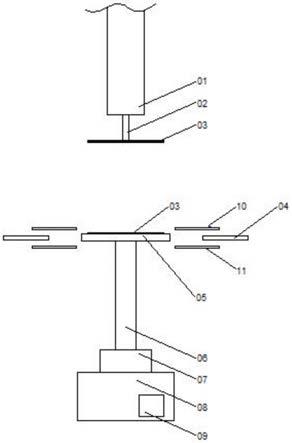
17.图3为本实用新型实施例所述的物料处于d区域以上的升降平台示意图;
18.图4为本实用新型实施例所述的机器人在d区域内取放物料的示意图;
19.图5为本实用新型实施例所述的升降平台控制方法流程图。
20.附图标记说明:
21.机器人-01、取放部件-02、物料-03、位置感应系统-04、放置平台-05、升降部件-06、动力部件-07、机座-08、控制系统-09、物料上限位置-10、物料下限位置-11
具体实施方式
22.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
23.如图1~4所示,本实施例提供了一种机器人配套的物料升降平台,为机器人对物料与货品抓取主动提供精确位置服务,所述升降平台包括主体机构和控制装置两大部分组成,其中主体机构包括:用于放置物料或货品的放置平台05、带动放置平台05移动的升降部件06、提供升降动力的动力部件07及机座08等。
24.升降部件06设置在放置平台05与机座08之间,升降部件06用于连接放置平台05和机座08,使得放置平台05随升降部件06的运动而运动。机座08设置在底部,起到支撑固定作用,用于支撑放置平台05和升降部件06,
25.动力部件07与升降部件06连接,用于驱动升降部件06的上升和下降。升降部件06的运动方向、运动模式以及速度等均由控制装置控制与实现。
26.控制装置用于检测感应放置在放置平台05上的物料03的位置并通过升降部件06控制放置平台05的升降移动,进而带动物料03移动,使得放置平台05和物料03处于预设位置区间内。具体地,控制装置包括位置感应系统04、控制系统09、物料上限位置10和物料下限位置11等,物料上限位置10和下限位置11之间形成位置区间,其中位置感应系统04设置在放置平台05的附近边缘或周围,用于感应放置平台05和物料03的位置,控制系统09设置
在机座08内部,位置感应系统04与控制系统09电连接,控制系统09根据位置感应系统04感应到的放置平台05和物料03的位置信号控制动力部件07与升降部件06的工作。位置感应系统的设置实现了对放置平台和物料位置的精确监测,使得物料的位置满足机器人抓取物料的精度要求,省略机器人对物料位置的计算与感应程序。
27.进一步的,放置平台5顶部的物料03的预设位置区间为d,d数值的标准根据机器人不需要对物料的位置进行识别计算,但可以精确稳定快速取放放置平台的物料,且机器人提供位移服务后的物料的新位移与位置稳定且符合要求来设置。即d的数值按照机器人对物料实现简易固定抓取的需要设定。
28.优选的,d设置为0.01~500mm,d的上限位置10为a,d的下限位置11为b,物料03的位置区域在a、b两个上限位置与下限位置之间。
29.进一步的,本实施例中位置感应系统04用于感应监控物料的上限位置10与下限位置11。位置感应系统04的感应元件类型设置为光对射发射接收类、光发送反射接收类、电磁感应类中的至少一种。
30.在本实施方式中,在物料升降平台的主体机构上部还设置有配套的取放装置,取放装置包括机器人01和取放部件02,取放部件02设置在机器人01的下部,用于取放放置在放置平台05上的物料03。
31.进一步的,取放装置与位置感应系统04配合工作,在位置感应系统04感应到物料03的位置处于d区域内部时,机器人01开始控制取放部件02下降以取放放置平台05上的物料03。实现物料的
32.作为本实用新型实施例的一部分,还提供了一种使用上述物料升降平台的升降控制方法,如图5所示,具体包括以下步骤:
33.s1、位置感应系统04检测物料03的位置信息;
34.s2、判断物料位置是否合格。当检测到物料03处于上限位置10与下限位置11之间的d区域内时,判定物料位置合格;当检测到物料03处于上限位置10与下限位置11之间的d区域外时,判定物料位置不合格;
35.s21、在物料位置合格时,位置感应系统04发出合格信号;
36.s22、控制系统09按内置运行模式输出运行指令,动力部件07按照控制系统09输出的运行指令保持静止或者运动,使物料静止在d区域内部;
37.s23、取放装置接收到位置感应系统04发出的物料静止在d区域内部的信息后,取放部件02开始下降以取放放置平台05上的物料。
38.s31、在物料位置不合格时,位置感应系统04发出不合格信号;
39.s32、控制系统09接收到不合格信号,按照系统内预设匹配系统自动发出对应指令,动力部件07按照控制系统09的指令提供动力运行模式,控制升降部件06向上或向下运动,放置平台05托住物料03向上或向下运动。
40.进一步的,运动可以是直线、弧线、曲线等,升降部件06的运动可以是垂直动力部件07或者机座08,也可与动力部件07或者机座08呈0-90度夹角。
41.更进一步的,物料位置合格是指物料03处于上限位置10与下限位置11之间的d区域内。物料位置不合格包括物料03处于上限位置10以上,或物料与03处于下限位置11以下两种情况。
42.s33、位置感应系统04再次检测物料03的位置信息,若判定物料位置仍旧不合格,则返回步骤s32,直至位置感应系统04检测到物料位置合格,执行步骤s21。
43.进一步的,当物料03通过下限位置11或上限位置10进入到d区间时,位置感应系统04检测到物料3的位置信息,再次重新发出进入物料合格区域的新合格信号,控制系统09接收新合格信号后,按控制系统09内置运行模式输出的新的运行指令,动力部件07按控制系统09提供新运行指令进行动作,放置平台05托住物料03随动力部件07运动与静止,物料03静止在d区域位置。
44.具体的,在本实施方式中,如图2所示,当物料03处于下限位置11以下位置时:即物料03处于d区域之外,位置感应系统04发出物料位置处于下限位置11以下的不合格信号,控制系统09按收到的不合格信号,按系统内预设匹配系统自动发出对应指令,动力部件07按照平台控制系统09的指令提供动力运行模式,升降部件06向上运动,放置平台05托住物料03向上运动,运动可以是直线、弧线、曲线等,升降部件06的运动可以是垂直平台升降动力部件07或者机座08,也可与动力部件07或者机座08成0-90度夹角;
45.待物料03通过下限位置11进入到d区域内,位置感应系统04重新发出物料03进入下限位置11以上的合格区域的新信号,控制系统09接收新信号后,按照控制系统09内置运行模式输出的新的运行指令,动力部件07按照控制系统09提供新运行指令进行动作,放置平台05托住物料03随动力部件07运动与静止,物料03静止在d区域位置。
46.在本实施方式中,如图1所示,当物料03处于d区域内时:位置感应系统04发出位置处于上限位置10与下限位置11之间的位置合格信号。控制系统09按内置运行模式输出运行指令,动力部件07按照控制系统09输出运行指令保持静止或者运动,最终物料03静止在d区域位置。
47.在本实施方式中,如图3所示,当物料03处于上限位置10以上位置时:即物料03处于d区域之外,位置感应系统04发出位置处于上限位置10以上的不合格信号,控制系统09接收到不合格信号,按照系统内预设匹配系统自动发出对应指令,动力部件07按控制系统09的指令提供动力运行模式,升降部件06向下运动,放置平台05托住物料03向下运动。
48.待物料03通过上限位置10进入到d区间内时,位置感应系统04重新发出位置进入上限位置10以下的位置合格信号,控制系统09接收位置感应系统04的新信号后,按照控制系统09内置运行模式输出运行指令,动力部件07按照控制系统09提供的运行指令进行动作,放置平台05托住物料03随动力部件07运动与静止,物料03静止在d区域位置。
49.本实施例提供的物料升降平台及其控制方法,通过本专利的物料智能升降平台的设备装置,物料的起始位置与终止位置始终处于上限位置10与下限位置11之间的d区域内部,机器人01的取放部件02直接在固定的位置取放物料03,不需要因时间与数量的变化对物料的位置进行计算与感应后再进行抓取物料03,省略了机器人感应计算的时间,提高能效,简化了机器人的运行程序与动作,提升机器人对物料的位移服务效率,实现了机器人运行节能高效低碳环保要求,具有直接的经济价值和社会价值。
50.进一步的,本实用新型所述的物料升降平台可适用于服装、服饰、文胸及相关领域的为机器人自动生产过程提供自动定位供料与取料的智能平台成套装置。
51.虽然本实用新型披露如上,但本实用新型并非限定于此。任何本领域技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与修改,因此本实用新型的保护范围
应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1