拣选辅助机器人及拣选辅助系统的制作方法
1.本发明涉及拣选辅助机器人及拣选辅助系统。
背景技术:
2.以往,公知有在根据订货对保管于物流中心等的物品进行发货时,人自物流中心等内的物品之中选择并取出进行发货的物品的拣选作业。例如,在专利文献1中,记载了作业人员观察在拣选台车所具备的显示器中显示的拣选订单来进行拣选。
3.(现有技术文献)
4.(专利文献)
5.专利文献1:日本国实开平7-15622号公报
技术实现要素:
6.(本发明要解决的问题)
7.但是,由于以往的拣选台车并非自己行走式,因此需要作业人员将拣选台车移动至想要进行作业的场所,从而作业人员无法高效进行作业。
8.因此,在本发明的一个实施方式中,其目的在于提供一种能够以作业人员可以高效进行物品的拣选的方式进行辅助的拣选辅助机器人及拣选辅助系统。
9.(用于解决问题的方法)
10.《项目1》本发明的实施方式的一个方式的拣选辅助机器人包括:容纳部,其用于容纳附加有rfid签条的物品;rfid读取器,其具有天线,该天线设于在上述物品容纳于上述容纳部时能够对上述rfid签条进行读取的位置;终端机,其用于接收拣选的指示;以及移动体,其搭载有上述容纳部和上述rfid读取器,并且基于在上述拣选的指示中包含的与物品的位置相关的信息,移动至上述物品被配置的位置。
11.根据该方式,由于移动至在拣选的指示中包含的物品被配置的货架,因此作业人员能够专注于对物品进行拣选的作业。因此,能够提供一种能够以作业人员可以高效进行物品的拣选的方式进行辅助的拣选辅助机器人。
12.《项目2》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目1中,上述终端机在识别到在上述物品容纳于上述容纳部时通过上述rfid读取器读取了上述rfid签条后,可以输出表示该识别的响应声音,或者可以显示表示该识别的响应显示。
13.根据该方式,作业人员通过响应声音或者响应显示,能够确认rfid签条被rfid读取器读取,因此能够进行接下来的作业,从而作业效率提高。
14.《项目3》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目2中,还可以包括认证部,其在通过上述终端机识别到在上述物品容纳于上述容纳部时通过上述rfid读取器读取了上述rfid签条后,进行上述作业人员的认证。
15.根据该方式,能够确定将物品容纳于容纳部的作业人员,因此能够把握作业人员的作业量、作业效率。
16.《项目4》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目1至3的任一项中,在上述容纳部中容纳上述物品时通过上述rfid读取器读取上述rfid签条后直至通过上述作业人员对上述终端机进行表示作业完成的操作为止,上述移动体不移动而待机。
17.根据该方式,能够直至作业人员进行完成的操作为止不使拣选辅助机器人移动,并且在进行了完成的操作时使其移动,从而通过进行按照作业人员的意图的移动,能够实现作业效率的提高。
18.《项目5》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目1至4的任一项中,在上述容纳部中容纳上述物品时通过上述rfid读取器读取上述rfid签条后,若通过上述作业人员对上述终端机进行表示作业结束的操作,则上述移动体可以基于在移动指示中包含的与位置相关的信息,移动至该位置。
19.根据该方式,能够在作业人员进行了完成的操作时使拣选辅助机器人移动,从而通过进行依照作业人员的意图的移动,能够实现作业效率的提高。
20.《项目6》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目5中,上述移动指示是关于与在上述拣选的指示中包含的上述物品不同的物品的拣选的指示,上述移动体可以基于与在该拣选的指示中包含的上述物品不同的与物品的位置相关的信息,移动至该物品被配置的位置。
21.根据该方式,能够在作业人员进行完成的操作时使拣选辅助机器人移动至接下来应容纳的物品被配置的货架,因此通过进行按照作业人员的意图的移动,能够实现作业效率的提高。
22.《项目7》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目5中,上述移动指示所包含的位置可以是上述容纳部内的上述物品的取出位置。
23.根据该方式,能够在作业人员进行了完成的操作时,使拣选辅助机器人移动至取出容纳部内的物品的位置,从而如果其他作业人员在取出容纳部内的物品的位置处进行取出物品的作业,则通过使拣选辅助机器人在进行容纳的作业人员和进行取出的作业人员之间移动,能够实现作业效率的提高。
24.《项目8》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目7中,上述移动体在依照上述移动指示移动至进行上述容纳部内的上述物品的取出的位置后,若上述终端机读取到另一拣选的指示,则上述移动体可以基于在上述另一拣选的指示中包含的与物品的位置相关的信息,移动至上述物品被配置的位置。
25.根据该方式,在容纳部内的物品被取出后,移动至在另一拣选的指示中包含的物品的位置,从而能够继续进行拣选的辅助,能够实现作业效率的提高。
26.《项目9》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目1至8的任一项中,上述天线可以设于上述容纳部的入口。
27.根据该方式,能够在容纳部的入口可靠地对附于物品的rfid签条进行读取,因此降低了无法对rfid签条进行读取的概率,能够通过读取的精度的提高而实现作业效率的提高。
28.《项目10》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目9中,上述容纳部的入口位于上述容纳部的上侧,上述天线可以设于上述入口的上侧。
29.根据该方式,能够通过容纳部的入口的上侧的天线更可靠地对附于物品的rfid签
条进行读取,因此进一步降低了无法读取rfid签条的概率,能够通过读取的精度的进一步提高而实现作业效率的进一步提高。
30.《项目11》在本发明的实施方式的其他观点的拣选辅助机器人中,在项目1至10的任一项中,包括多个上述容纳部,并且上述天线设于上述多个容纳部的每一个容纳部,还可以包括屏蔽部件,其在上述多个容纳部之间以多个上述天线能够读取的区域不重复的方式进行分隔。
31.根据该方式,在多个容纳部之间,能够抑制重复的读取,从而能够利用能够容纳更多物品的多个容纳部,能够实现作业效率的大幅提高。
32.《项目12》本发明的实施方式的一个方式的拣选辅助系统包括服务器和上述1至11中任一项记载的拣选辅助机器人,该拣选辅助系统包括:拣选指示管理部,其发送上述拣选的指示;信息接收部,其接收上述rfid读取器读取的被写入附于物品的rfid签条中的id信息;计数部,其基于上述id信息,对放入上述容纳部中的物品的个数进行计数;以及拣选状况管理部,其基于上述被计数的物品的个数,对上述拣选的状况进行发送。
33.根据该方式,由于移动至在拣选的指示中包含的物品被配置的货架,因此作业人员能够专注于对物品进行拣选的作业。因此,能够提供一种能够包括以作业人员可以高效进行物品的拣选的方式进行辅助的拣选辅助机器人的拣选辅助系统。
34.《项目13》在本发明的实施方式的其他观点的拣选辅助系统中,在项目12中,上述计数部对于放入上述容纳部中的个数相对于由上述拣选的指示所指示的个数的过剩或不足进行判断,上述拣选状况管理部可以在上述终端机中显示上述物品不足、上述拣选完成以及上述物品过剩中的任一者。
35.根据该方式,作业人员能够容易识别物品不足、拣选完成、物品过剩。
36.(发明的效果)
37.根据本发明的一个实施方式,能够提供一种能够以作业人员可以高效地进行物品的拣选的方式进行辅助的拣选辅助机器人及拣选辅助系统。
附图说明
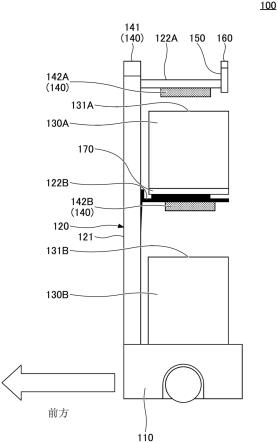
38.图1是示出实施方式的拣选辅助机器人100的侧视图。
39.图2是实施方式的拣选辅助系统1的整体的构成图。
40.图3是示出实施方式的拣选辅助系统1的整体的处理的序列图。
41.图4是管理服务器10的功能框图。
42.图5是实施方式的显示的画面的一个例子。
43.图6是平板计算机150的显示画面的一个例子。
44.图7是实施方式的显示的画面的一个例子。
45.图8是说明拣选辅助机器人100的作业效率的图。
46.图9是说明拣选辅助机器人100的作业效率的图。
47.图10是管理服务器10中的拣选处理的流程图。
48.图11是拣选数量计数处理(图10的s14)的流程图。
49.图12是实施方式的地图制作处理(图10的s11)的流程图。
50.图13是示出平板计算机150的控制部151所执行的处理的流程图。
51.图14是实施方式的管理服务器10、平板计算机150的硬件构成图。
具体实施方式
52.以下,对于应用了本发明的拣选辅助机器人及拣选辅助系统的实施方式进行说明。
53.图1是示出实施方式的拣选辅助机器人100的侧视图。拣选辅助机器人100包括搬运车110、车架120、箱部130a、130b、rfid(radio frequency identifier)读取器140、平板计算机150、脸识别部160、以及屏蔽部170。
54.作为一个例子,拣选辅助机器人100用于店铺、物流中心、仓库等的建筑物内,其是一边通过自己行走式的搬运车110自动行驶,一边辅助作业人员进行物品的拣选(选择并取出物品)的作业的机器人(装置)。在图1中箭头所示左方是拣选辅助机器人100的前方,图1中的右方是拣选辅助机器人100的后方。以下,使用拣选辅助机器人100的行进方向中的前方以及后方称为前后方向。搬运车110可以在前方、右前方、以及左前方行驶。
55.这里,物品是指,配置于店铺、物流中心、仓库等的建筑物内的货架等的各种商品等,例如,可以是服装、日用品等的各种商品等。另外,物品可以是口服药、注射药、或者外用治疗药等的医药品、口罩、或者其他医疗用的衣服、器具等。
56.搬运车110是移动体的一个例子,作为一个例子由所谓agv(automatic guided vehicle)实现。搬运车110具有由计算机构成的控制部。搬运车110的控制部可以通过有线通信或者无线通信与平板计算机150进行数据通信。搬运车110的控制部依照对于配置于建筑物内的货架等之间的通道等制作的电子地图,使搬运车110移动至自平板计算机150传送的位置信息所表示的规定位置。搬运车110的控制部在向位置信息所表示的规定位置的移动完成后,将表示到达规定位置的到达通知传送至平板计算机150。需要说明的是,这里,对于搬运车110使用平板计算机150使用自管理服务器接收的拣选的指示中包含的位置信息而进行移动的方式进行说明,但是搬运车110可以具有能够直接与管理服务器进行无线通信的无线通信功能,并且通过无线通信自管理服务器直接获得位置信息。
57.车架120安装于搬运车110,用于保持箱部130a、130b、rfid读取器140、平板计算机150、以及脸识别部160。车架120具有车架主体121和支板122a、122b。车架主体121作为一个例子是铝制的棒状的部件,作为一个例子安装有铁制的支板122a、122b。
58.支板122a安装于车架主体121的上端而向后方延伸,其保持有rfid读取器140的主体部141和天线142a、平板计算机150、以及脸识别部160。更具体而言,rfid读取器140的主体部141安装于支板122a的前端的上表面,天线142安装于支板122a的前后方向中的中央的下表面,平板计算机150和脸识别部160安装于支板122a的后端。平板计算机150和脸识别部160朝向后方安装。由于拣选辅助机器人100不向后方行驶,因此确保了利用拣选辅助机器人100的作业人员的安全性。需要说明的是,在能够可靠地确认作业人员的安全性的情况下,可以设定为能够自动或手动向后方行驶。
59.支板122b安装于车架主体121的上下方向的中间附近。因此,支板122b位于比支板122a靠下侧。在支板122b的上表面安装箱部130a,在支板122b的下表面安装rfid读取器140的天线142b。
60.箱部130a、130b是容纳部的一个例子,其容纳被作业人员拣选的物品。箱部130a、
130b作为一个例子为长方体状的箱子,上表面具有开口的入口131a、131b。将物品放入箱部130a、130b内时物品必定通过入口131a、131b。这里,对于自箱部130a、130b取出物品时作业人员通过入口131a、131b进行取出的方式进行说明。因此,入口131a、131b是作为出入口被使用的开口部。但是,箱部130a、130b可以具有仅在取出时进行利用的专用的取出口。
61.箱部130a如上所述安装于支板122b的上表面,箱部130b安装于搬运车110的上表面。箱部130a位于上层,箱部130b位于下层。这里对于箱部130a通过支板122b安装于车架主体121,箱部130b安装于搬运车110的上表面的方式进行说明。但是,箱部130a位于比箱部130b靠上即可,箱部130a、130b的安装方式可以为任一方式。另外,这里,对于拣选辅助机器人100包括两个箱部130a、130b的方式进行了说明,但是箱部的数量可以为一个,也可以为三个。
62.rfid读取器140具有主体部141以及天线142a、142b。天线142a、142b具有向下的指向性。主体部141与天线142a、142b连接,自天线142a、142b发射rfid签条的读取用的频率的电波,并且接收rfid签条发回的电波。rfid签条作为一个例子为被动型,不具有电池。各rfid签条的ic(integrated circuit)的存储器中储存有固有的物品id(identifier),若各rfid签条自rfid读取器140接收电波,则通过接收的电波的电力启动而发射包括固有的物品id的信号。主体部141读取天线142a、142b接收的电波中包含的物品id,对各rfid签条进行识别。
63.天线142a位于箱部130a的入口131a的正上,其配置于能够可靠地读取附于通过入口131a容纳于箱部130a内的物品的rfid签条的位置。另外,天线142b位于箱部130b的入口131b的正上,其配置于能够可靠地读取附于通过入口131b容纳于箱部130b内的物品的rfid签条的位置。这样,通过配置天线142a、142b,作业人员能够可靠地读取附于自货架等拣选而容纳于箱部130a、130b的物品的rfid签条,从而能够抑制漏读取(漏读)。因此,能够正确拣选期望个数的期望物品。
64.另外,在例如对物品赋予条形码而通过条形码读取器进行读取的情况下,一个一个对条形码进行读取,无法同时读取多个条形码。与此相对,由于在对物品赋予rfid签条的情况下可以同时读取多个rfid签条,因此可以通过各个天线142a、142b一并对分别附于多个物品的多个rfid签条进行读取,从而作业人员能够高效且在快速短时间内进行拣选作业。
65.另外,若天线142a、142b设于箱部130a、130b的下侧,则在物品具有铝制的薄膜等那样的金属制的包装的情况下,担心因已经容纳于箱部130a、130b的物品的金属制的包装等而遮挡天线142a、142b发射的读取用的电波,从而无法读取通过箱部130a、130b的入口131a、131b的物品的rfid签条。另外,在物体包括液体的情况下,若天线142a、142b设于箱部130a、130b的下侧,则天线142a、142b发射的读取用的电波的放射分布因已经容纳于箱部130a、130b的物品的液体而改变,担心无法读取通过箱部130a、130b的入口131a、131b的物品的rfid签条。
66.与此相对,在本实施方式中,由于在箱部130a、130b的正上分别配置有天线142a、142b,因此即使已经在箱部130a、130b内容纳有具有金属制的包装等的物品、包括液体的物品,也能够通过天线142a、142b可靠读取通过入口131a、131b容纳于箱部130a、130b的物品的rfid签条。另外,能够抑制产生漏读取。
67.平板计算机150具有显示器和触摸面板,是通过触碰在显示器中显示的gui(graphic user interface)等的图像而能够进行操作的终端机。平板计算机150自管理服务器接收拣选的指示以及拣选的状况并在显示器中进行显示,并且将拣选的指示中包含的物品的位置信息传送至搬运车110的控制部。例如,平板计算机150可以使用应用程序软件,显示拣选的指示,并且将位置信息传送至搬运车110的控制部。
68.另外,平板计算机150自rfid读取器140接收rfid读取器140自rfid签条读取的物品id信息。平板计算机150将自rfid读取器140接收的物品id信息发送至管理服务器。另外,平板计算机150将通过脸识别部160取得的用于确定作业人员的信息与自附于在箱部130a、130b中容纳的物品的rfid签条读取的物品id信息建立关联而发送至管理服务器。这是为了通过设定为能够在管理服务器对哪个作业人员容纳了哪个物品进行管理,对各作业人员的工作效率进行把握。
69.需要说明的是,这里,对于拣选辅助机器人100包括平板计算机150的方式进行了说明,但是可以使用智能手机、笔记本型个人计算机等任意的计算机终端。
70.脸识别部160通过进行作业人员的脸识别,取得用于确定作业人员的作业人员id信息。作为一个例子,对于为了在管理服务器把握各作业人员的作业效率而拣选辅助机器人100包括脸识别部160的方式进行了说明,但是可以代替脸识别部160而使用通过其他手法来识别作业人员的生物体的认证部,也可以使用读取分配给各作业人员的id卡的读取装置。另外,在不特别进行作业效率等的管理的情况下,拣选辅助机器人100可以不包括脸识别部160等那样的用于识别作业人员的认证部。另外,可以不与自附于在箱部130a、130b中容纳的物品的rfid签条读取的物品id信息建立关联,例如,能够在仅触碰拣选辅助机器人的情况下,在服务器对通过脸识别部160取得的用于确定作业人员的信息进行管理。
71.屏蔽部170是导体制且用于屏蔽电波的部件。屏蔽部170设于箱部130a和天线142b之间,使得天线142a不对附于在箱部130b中容纳的物品的rfid签条进行读取。需要说明的是,在天线142b在上方向中也具有指向性的情况下,通过屏蔽部170以天线142b不读取位于上侧的rfid签条的方式进行屏蔽即可。
72.《系统构成》
73.图2是实施方式的拣选辅助系统1的整体的构成图。如图2所示,拣选辅助系统1包括管理服务器10和拣选辅助机器人100。在图2中,对于拣选辅助机器人100仅示出主要的构成要素,并且将平板计算机150放大而示出控制部151。控制部151是用于进行与平板计算机150的动作相关的全部控制的控制部,其包括cpu(central processing unit)、存储器等。
74.实施拣选作业的作业人员作为一个例子在店铺、物流中心、仓库等的建筑物内,将配置于拣选辅助机器人100之前的货架等的物品40放入箱部130a或者130b。由于在各物品40分别附有一个rfid签条41,因此在物品40被放入箱部130a、130b时,通过天线142a、142b读取附于物品40的rfid签条41的物品id。
75.管理服务器10将拣选的指示发送至平板计算机150。拣选的指示可以包括拣选辅助机器人100应移动的位置、作业人员应放入箱部130a或者130b的物品40、以及作业人员应放入箱部130a或者130b的物品40的个数的信息。拣选辅助机器人100应移动的位置是物品40被配置或者保管等的位置。另外,管理服务器10将拣选的状况发送至平板计算机150。拣选的状况可以包括已经放入箱部130a或者130b的各物品40的个数的信息。具体而言,管理
服务器10基于rfid读取器140自rfid签条41读取的物品id信息,对被放入箱部130a或者130b中的各物品40的个数进行计数。
76.管理服务器10由一个或多个计算机构成。另外,管理服务器10可以通过任意的网络50与平板计算机150进行发送数据或接收数据。对于管理服务器10的详细内容后述。
77.平板计算机150自管理服务器10接收拣选的指示以及拣选的状况并在显示器上进行显示,并且将拣选的指示中包含的位置信息传送至搬运车110的控制部。搬运车110移动至位置信息所表示的位置。例如,平板计算机150可以使用应用程序软件,显示拣选的指示,并且将拣选的指示中内包含的位置信息传送至搬运车110的控制部。作业人员走到拣选辅助机器人100所处位置,确认在平板计算机150中显示的物品40的种类和货架等的位置,对物品40进行拣选并放入箱部130a、130b。
78.rfid读取器140读取被写入rfid签条41的物品id信息。rfid读取器140将自rfid签条41读取的物品id信息传送至平板计算机150。
79.另外,平板计算机150自rfid读取器140接收物品id信息。平板计算机150将自rfid读取器140接收的物品id信息发送至管理服务器10。另外,若平板计算机150接收物品id信息,并且判定为按照拣选的指示的正确物品40,则输出表示为正确物品40的响应声音。另一方面,若平板计算机150接收物品id信息,并且判定并不是按照拣选的指示的正确的物品40,则输出表示并非正确物品40的响应声音。作业人员能够通过响应声音确认自己进行的拣选作业是否正确。需要说明的是,平板计算机150可以代替响应声音或者除了响应声音之外,在显示器中显示表示为正确物品40或者并非正确物品40的响应显示。
80.拣选辅助机器人100包括平板计算机150和rfid读取器140。这里作为一个例子对于拣选辅助机器人100包括两个箱部130a、130b,rfid读取器140具有两个天线142a、142b,分别在箱部130a、130b配置天线142a、142b的方式进行说明。作业人员可以将拣选的物品40放入两个箱部130a、130b的任一者,例如,可以根据发送目的地等而放入两个箱部130a、130b的任一者。另外,在发送目的地等存在两个的情况下,可以将两个箱部130a、130b分开利用为两个发送目的地。
81.如上所述,物品40是配置于店铺、物流中心、仓库等的建筑物内的货架等的各种商品等。在物品40上附有rfid签条41。rfid签条41具有内置写入有物品id信的存储器的ic芯片。rfid签条41在各物品40上附有一个。使rfid签条41附于物品40是指,将rfid签条41安装于物品40,具体而言,例如,将rfid签条41粘贴于物品40,缝合于物品40,或者通过带条等固定于物品40等。
82.管理服务器10在物品40进入物流中心等后,将在rfid签条41中写入的物品id信息与附于该rfid签条41的物品40的信息相关联地进行管理。另外,管理服务器10对于表示rfid读取器140容纳于拣选辅助机器人100的箱部130a、130b的哪一者的信息进行管理。
83.《整体处理》
84.图3是示出实施方式的拣选辅助系统1的整体的处理的序列图。
85.管理服务器10制作用于引导拣选辅助机器人100的地图(步骤s1)。
86.管理服务器10将拣选的指示的数据发送至平板计算机150(步骤s2)。如上所述,拣选的指示可以包括拣选辅助机器人100应移动的位置(物品40被保管的位置)、作业人员在该位置应放入箱部130a或者130b的物品40、以及作业人员应放入箱部130a或者130b的物品
40的个数的信息。
87.平板计算机150将自管理服务器10接收的拣选的指示中包含的位置信息传送至搬运车110的控制部(步骤s2a)。
88.搬运车110移动至拣选的指示中包含的规定位置(步骤s2b)。规定位置表示在拣选的指示中包含的物品40所配置的货架等所处的位置。通过步骤s2b的处理,拣选辅助机器人100移动至拣选的指示中包含的物品40所配置的货架等之前。
89.搬运车110的控制部在向拣选的指示中包含的规定位置的移动完成后,通知平板计算机150到达规定位置(步骤s2c)。拣选辅助机器人100在接收到下一个移动的指示为止,在规定位置待机。即,拣选辅助机器人100在作业人员的拣选作业完成为止在拣选的指示中包含的物品40所处货架等之前待机。作业人员能够识别在自己的周围拣选辅助机器人100正在待机的场所是存在应进行的拣选作业的场所。
90.平板计算机150若在步骤s2c中自搬运车110的控制部接收到表示到达规定位置的通知,则在步骤s2中在显示器上显示自管理服务器10接收的拣选的指示(步骤s3)。作业人员可以走到拣选辅助机器人100待机的场所,一边观看在拣选辅助机器人100的平板计算机150中显示的拣选的指示,一边实施拣选作业。
91.rfid读取器140读取附于作业人员放入箱部130a或者130b的各物品40的rfid签条41中被写入的物品id信息(步骤s4)。rfid读取器140通过天线142a、142b读取附于通过箱部130a、130b的入口131a、131b的物品40的rfid签条41。通过步骤s4的处理,能够取得附于由作业人员放入箱部130a、130b的物品40的rfid签条41的物品id。
92.rfid读取器140将在步骤s4中读取的物品id信息、用于识别rfid读取器140的信息发送至平板计算机150(步骤s5)。
93.平板计算机150将在步骤s5中接收的物品id信息、用于识别rfid读取器140的信息发送至管理服务器10(步骤s6)。
94.管理服务器10基于在步骤s6中接收的物品id信息,对被放入箱部130a或者130b的各物品40的个数进行计数(步骤s7)。
95.管理服务器10基于在步骤s7中计数的各物品40的个数,将拣选的状况的数据发送至平板计算机150(步骤s8)。如上所述,拣选的状况可以包括一斤被放入箱部130a或者130b的各物品40的个数的信息。
96.平板计算机150将在步骤s8中接收的拣选的状况在显示器上进行显示(步骤s9)。作业人员可以一边观察这样的拣选的状况,一边判断是否应进一步将物品40放入箱部130a、130b。
97.《功能框》
98.图4是管理服务器10的功能框图。如图4所示,管理服务器10可以包括拣选指示管理部101、拣选指示储存部102、地图制作部103、id信息接收部104、计数部105、以及拣选状况管理部106。另外,管理服务器10可以通过执行程序而作为拣选指示管理部101、地图制作部103、id信息接收部104、计数部105、以及拣选状况管理部106起作用。以下,分别进行说明。
99.需要说明的是,平板计算机150可以具有管理服务器10的一部分或全部的功能。例如,平板计算机150可以包括用于接收拣选的指示的装置(也称为拣选指示接收部)、id信息
接收部104、计数部105、以及拣选状况管理部106。
100.拣选指示管理部101将拣选的指示的数据发送至平板计算机150。例如,响应作业人员触碰在平板计算机150中显示的用于开始拣选作业的画面,拣选指示管理部101开始拣选的指示的数据的发送。如上所述,拣选的指示可以包括拣选辅助机器人100应移动的位置(物品40被保管的货架等的位置)、作业人员在该位置应放入箱部130a或者130b的物品40、以及作业人员应放入箱部130a或者130b的物品40的个数的信息。另外,拣选指示管理部101将拣选的指示的数据储存于拣选指示储存部102中。
101.在拣选指示储存部102中储存有向平板计算机150发送的拣选的指示的数据。
102.以下,一边参照图5,一边对在平板计算机150中显示的示出拣选的指示的画面进行说明。
103.图5是实施方式的显示的画面的一个例子。在图5所示画面中,将箱部130a、130b作为a、b进行示出。如图5所示,可以显示拣选辅助机器人100应移动的位置(物品40被保管的货架等的位置,也称为“拣选场所”)。另外,如图5所示,作为拣选的指示,可以显示作业人员在该场所应放入箱部130a或者130b的物品40(拣选对象)的商品名、物品40的图像(例如,在物流中心等被保管时的物品40的图像)。另外,如图5所示,作为拣选的指示,可以显示作业人员应放入箱部130a或者130b的该物品40的个数(在图5的例子中,应放入箱部130a、130b的个数)。另外,如图5所示,可以显示实施拣选作业的日期(作业日)、作业人员的识别符(作业人员id)、作业人员的姓名(作业人员名字)、应拣选的物品40的总数中的拣选完成的个数(完成数/总物品数)、完成拣选为止的目标时间中的经过的时间(经过时间/目标时间)等显示。作业人员可以观察图5的画面而知晓应在哪个场所分别对哪个物品40拣选多少个。需要说明的是,在根据物品40不同指定了放入箱部130a、130b的哪一个的情况下,作业人员能够观察图5那样的画面而立即知晓向与指示不同的箱部130a、130b的错放。
104.需要说明的是,可以针对每个箱部130a、130b,显示表示作业人员应放入箱部130a、130b的一个或多个物品40、作业人员应放入箱部130a、130b的各物品40的个数的列表。以下,参照图6,对于在平板计算机150中显示的表示针对每个箱部130a、130b的拣选的指示的画面进行说明。
105.图6是平板计算机150的显示画面的一个例子。在图6中,作为一个例子,示出了与应放入箱部130a的物品40相关的显示内容。例如,若图5的画面被点击,则可以转移至图6的画面。如图6所示,可以显示作业人员应放入箱部130a的一个或多个物品40。另外,如图6所示,可以显示作业人员应放入箱部130a的各物品40的个数。另外,如图6所示,可以显示物品40被发送的去处(目的地)、应放入箱部130a的物品40的总数(物品数)、以及发货日等。作业人员观察图6那样的画面,可以知晓针对每个箱部130a、130b应拣选几个何种物品40。
106.返回图4。id信息接收部104自平板计算机150接收rfid读取器140自rfid签条41读取的物品id信息、用于识别rfid读取器140的信息。id信息接收部104在接收到物品id信息、用于识别rfid读取器140的信息后,通知地图制作部103以及计数部105。
107.地图制作部103进行地图制作处理。具体而言,地图制作部103制作用于引导拣选辅助机器人100的地图。以下,分为开始拣选的实施时的地图制作和拣选的实施中的地图制作进行说明。
108.《拣选实施开始时》
109.地图制作部103生成经由指示作业人员放入箱部130a或者130b的物品40被保管的全部场所的最短距离的路线(路径)。地图制作部103制作在物流中心等内的各货架的配置图上明确示出了生成的路线、下一个拣选场所(也就是收,拣选辅助机器人100接下来应去往的拣选场所)以及全部的拣选场所的地图。拣选辅助机器人100依照平板计算机150自管理服务器10接收的拣选的指示中包含的位置信息以及由地图制作部103制作的地图,移动至各拣选场所。
110.《拣选实施中》
111.地图制作部103制作在物流中心等内的各货架的配置图上明确示出了在拣选实施开始时生成的路线、下一个拣选场所(也就是说,拣选完成的拣选场所的下一个拣选场所)以及全部的拣选场所的地图。需要说明的是,地图制作部103可以不使用在拣选实施开始时生成的路线,而是重新生成新的路线。
112.在存在多个拣选辅助机器人100的情况下,在拣选实施开始时以及拣选实施中的任一者中,地图制作部103均基于多个拣选辅助机器人100的拣选的状况,以多个拣选辅助机器人100不会冲突(例如,多个拣选辅助机器人100不同时或在规定的时间内在相同方向或相反方向通过同一通道)的方式生成路线即可。另外,多个拣选辅助机器人100的现在地、路线(路径)可以在地图中进行明确示出。地图制作部103可以生成避开因其他拣选辅助机器人100而拥挤的货架的路线(路径)。
113.以下,参照图7,对于表示在平板计算机150中显示的地图的画面进行说明。
114.图7是实施方式的显示的画面的一个例子。例如,可以在图5的画面被点击后转移至图7的画面。如图7所示,可以显示在物流中心等内的各货架的配置图上明确示出了路线、下一个拣选场所以及全部拣选场所的地图。
115.返回图4。计数部105进行拣选数量计数处理。具体而言,计数部105参照在拣选指示储存部102中储存的拣选的指示,确定指示作业人员放入箱部130a或者130b的各物品40的个数。另外,计数部105基于自id信息接收部104接收的物品id信息,对被放入箱部130a或者130b的各物品40的个数进行计数。具体而言,计数部105若自id信息接收部104接收到物品id信息,则判断附有写入有该物品id信息的rfid签条41的物品40是否被放入了箱部130a或者130b。另外,计数部105基于被指示的个数和计数的个数,判断各物品40的、相对于指示作业人员放入箱部130a或者130b的个数的、已经被放入箱部130a或者130b的个数的过剩或不足。具体而言,计数部105在被指示的个数多于计数的个数时判断为物品40不足,在被指示的个数与计数的个数相同时判断拣选完成,在被指示的个数少于计数的个数时判断物品40过剩。
116.需要说明的是,计数部105可以基于物品id信息、用于识别rfid读取器140的信息、以及表示rfid读取器140通过天线142a、142b的哪一者对物品id信息进行了读取的信息,判断物品40被放入箱部130b、130b的哪一者。
117.拣选状况管理部106基于计数部105计数的各物品40的个数,将拣选的状况的数据发送至平板计算机150。如上所述,拣选的状况可以包括已经被放入箱部130a或者130b的各物品40的个数的信息。以下,参照图5以及图6,对于在示出拣选的指示的画面上的拣选的状况的显示进行说明。
118.如图5所示,作为拣选的指示,可以显示作业人员应放入箱部130a或者130b的物品
40的个数(参照分数的分母)。可以与这样的作业人员应放入箱部130a或者130b的物品40的个数的显示同时显示已经被放入箱部130a或者130b的物品40的个数(参照分数的分子)。而且,可以显示对于指示作业人员放入箱部130a或者130b的个数的、已经被放入箱部130a或者130b的个数的过剩或不足。例如,可以以作业人员能够容易识别物品40不足、拣选完成、物品40过剩的方式进行显示。例如,可以在物品40不足的情况下不赋予核对记号,在拣选完成的情况下赋予核对记号,在物品40过剩的情况下赋予
×
记号。
119.如图6所示,可以显示作业人员应放入箱部130a的一个或多个物品40的个数。可以与这样的作业人员应放入箱部130a的各物品40的个数的显示同时显示已经被放入箱部130a的各物品40的个数。而且,可以显示对于指示作业人员放入箱部130a的个数的、已经被放入箱部130a的个数的过剩或不足。例如,可以以作业人员能够容易识别物品40不足、拣选完成、物品40过剩的方式进行显示。例如,可以在物品40不足的情况下不赋予核对记号,在拣选完成的情况下赋予核对记号,在物品40过剩的情况下赋予
×
记号。需要说明的是,对于箱部130b也同样能够进行这样的显示。
120.图8是用于说明拣选辅助机器人100的作业效率的图。例如,在如图8的(a)所示使用手推式的推车进行拣选的情况下,作业人员一边推着推车一边寻找配置有(1)~(4)的物品40的货架6来进行拣选。
121.与此相对,在图8的(b)中,示出了使用3台拣选辅助机器人100a~100c,通过拣选辅助机器人100a对(1a)~(4a)的物品40进行拣选,通过拣选辅助机器人100b对(1b)~(4b)的物品40进行拣选,通过拣选辅助机器人100c对(1c)~(4c)的物品40进行拣选的状况。拣选辅助机器人100a~100c与图1所示拣选辅助机器人100相同。
122.作为一个例子,拣选辅助机器人100a~100c位于相同通道。由于拣选辅助机器人100a~100c在拣选的指示中包含的位置信息所表示的货架之前的位置待机,因此作业人员可以走到拣选辅助机器人100a~100c的位置,一边观看平板计算机150的显示,一边对拣选的指示中包含的物品40进行拣选。由于进行了完成操作的拣选辅助机器人(100a~100c的任一者)依照下一个拣选的指示自动进行移动而在货架之前待机,因此作业人员可以接近移动后的拣选辅助机器人(100a~100c的任一者),进行拣选作业。因此,若使用拣选辅助机器人100,能够使拣选的作业效率大幅提高。特别是,若使用多个拣选辅助机器人100,能够进一步提高作业效率。
123.图9是用于说明拣选辅助机器人100的作业效率的图。在如图9的(a)所示使用手推式的推车进行拣选的情况下,作业人员一边自包装站5推着推车,一边在存在货架6的区域巡回而进行拣选。作业人员在每次推车被物品40装满后返回包装站5。包装站5是将物品40自推车取出的地方。
124.与此相对,如图9的(b)所示,若事先设定拣选辅助机器人100在包装站5与存在货架6的区域之间自动往返,则作业人员可以专注于在存在货架6的区域的拣选作业,不需要返回包装站5。若事先在包装站5配置自拣选辅助机器人100取出物品40的人员,则拣选辅助机器人100能够在将箱部130a、130b清空的状态下返回存在货架6的区域,并且在拣选的指示中包含的位置待机。因此,能够使作业效率大幅提高。
125.图10是管理服务器10中的拣选处理的流程图。
126.地图制作部103进行地图制作处理(步骤s11)。在拣选实施开始时,地图制作部103
生成经由指示作业人员放入箱部130a或者130b的物品40被保管的全部场所的最短距离的路线(路径)。接下来,地图制作部103制作在物流中心等内的各货架的配置图上明确示出生成的路线、下一个拣选场所(也就是说,作业人员最初应去往的拣选场所)、以及全部拣选场所的地图。
127.拣选指示管理部101将拣选的指示的数据发送至平板计算机150(步骤s12)。如上所述,拣选的指示可以包括拣选辅助机器人100应移动的位置(也就是说,拣选辅助机器人100应移动的拣选场所)、作业人员在该场所应放入箱部130a或者130b的物品40、以及作业人员应放入箱部130a或者130b的物品40的个数的信息。
128.平板计算机150在显示器上显示拣选指示管理部101在s12中发送的拣选的指示。另外,搬运车110依照拣选的指示中包含的位置信息移动至规定位置。作业人员可以一边观看移动到规定位置的拣选辅助机器人100的平板计算机150的显示,一边实施拣选作业。需要说明的是,作业人员可以使示出拣选的指示的画面转换为s11的地图。
129.id信息接收部104自平板计算机150接收物品id信息、用于识别rfid读取器140的信息(步骤s13)。具体而言,id信息接收部104接收在附于作业人员放入箱部130a或者130b的各物品40的rfid签条41中被写入的物品id信息。
130.计数部105基于在s13中接收的物品id信息、以及用于识别rfid读取器140的信息,进行拣选数量计数处理(步骤s14)。详细而言,参照图11进行说明。
131.拣选状况管理部106基于在s14中进行了的拣选数量计数处理,将拣选的状况的数据发送至平板计算机150(步骤s15)。
132.拣选状况管理部106判断在现在的拣选场所应放入箱部130a或者130b的全部物品40是否已被放入(步骤s16)。在已被放入的情况下,进入步骤s17。在未被放入的情况下,返回步骤s13。
133.若返回步骤s13,则id信息接收部104等待来自平板计算机150的物品id信息。
134.在步骤s17中,拣选状况管理部106判断应放入箱部130a或者130b的全部物品40(也就是说,在全部拣选场所应放入箱部130a或者130b的全部物品40)是否已被放入(步骤s17)。在已被放入的情况下,进入步骤18。在未被放入的情况下,返回步骤s11。
135.若返回步骤s11,则地图制作部103制作明确示出了拣选辅助机器人100接下来应去往的拣选场所的地图。具体而言,地图制作部103制作在物流中心等内的各货架的配置图上明确示出了拣选实施开始时生成的路线(或者重新生成的路线)、下一个拣选场所(也就是说,拣选辅助机器人100接下来应移动的拣选场所)、以及全部的拣选场所的地图。之后,在步骤s12中,拣选指示管理部101将拣选的指示的数据发送至平板计算机150。拣选的指示可以包括拣选辅助机器人100应移动的位置(拣选辅助机器人100接下来应移动的拣选场所)、作业人员在该场所应放入箱部130a或者130b的物品40、以及作业人员应放入箱部130a或者130b的物品40的个数的信息。
136.在步骤s18中,拣选状况管理部106向平板计算机150通知拣选作业完成(步骤s18)。
137.图11是拣选数量计数处理(图10的s14)的流程图。
138.计数部105参照在拣选指示储存部102中储存的拣选的指示,确定向作业人员指示的放入箱部130a或者130b的各物品40的个数(步骤s21)。
139.计数部105基于自id信息接收部104接收的物品id信息,对已放入箱部130a或者130b的各物品40的个数进行计数(步骤s22)。具体而言,计数部105若自id信息接收部104接收到物品id信息,则判断附有写入有该物品id信息的rfid签条41的物品40是否已放入箱部130a或者130b。
140.计数部105基于在步骤s21中确定的指示的个数和在步骤s22中计数的个数,判断各物品40的、已经放入箱部130a或者130b的个数相对于向作业人员指示的放入箱部130a或者130b的个数的过剩或不足(步骤s23)。具体而言,计数部105在于步骤s21中确定的指示的个数多于在步骤s22中计数的个数时,判断物品40不足,在于步骤s21中确定的指示的个数与在步骤s22中计数的个数相同时判断拣选完成,在于步骤s21中确定的指示的个数少于在步骤s22中计数的个数时,判断物品40过剩。
141.图12是实施方式的地图制作处理(图10的s11)的流程图。
142.地图制作部103生成经由指示作业人员放入箱部130a或者130b的物品40被保管的全部场所的最短距离的路线(路径)(步骤s31)。
143.地图制作部103确定下一个拣选场所(步骤s32)。
144.地图制作部103制作在物流中心等内的各货架的配置图上明确示出了在s31中生成的路线、在s32中确定的下一个拣选场所、以及全部的拣选场所的地图(步骤s32)。
145.图13是示出平板计算机150的控制部151所执行的处理的流程图。
146.作为前提条件,设定平板计算机150自管理服务器10接收到拣选的指示,并将其储存于存储器中。
147.控制部151将在拣选的指示中包含的位置信息传送至搬运车110的控制部(步骤s41)。由此,拣选辅助机器人100移动至位置信息所表示的规定位置。
148.控制部151判定是否接收到到达通知(步骤s42)。若控制部151判定未接收到达通知,则重复执行步骤s42的处理。
149.若控制部151判定接收了到达通知(s42:yes),则在显示器中显示在拣选的指示中包含的物品40的种类、个数等(步骤s43)。
150.控制部151判定是否自rfid读取器140接收到物品id信息(步骤s44)。若控制部151判定未接收到物品id信息,则重复执行步骤s44的处理。
151.控制部151在判定接收到物品id信息(s44:yes)的情况下,将接收到的物品id信息与在拣选的指示中包含的物品40的种类进行核对,判定是否为应拣选的正确的物品40(步骤s45)。
152.若控制部151判定为正确的物品40(s45:yes),则输出表示为正确的物品40的响应声音(步骤s46a)。
153.若控制部151判定为并非正确的物品40(s45:no),则输出表示并非正确的物品40的响应声音(步骤s46b)。在步骤s46b中输出的响应声音与在步骤s46a中输出的响应声音不同。因此,作业人员可以通过响应声音来确认判定结果。
154.控制部151判定是否存在完成操作(步骤s47)。在作业人员观看平板计算机150的显示,在确认了对在该拣选场所中应拣选的物品40全部拣选结束时,通过操作平板计算机150来进行完成操作。完成操作例如为按下ok按钮的操作。另外,步骤s47的判定是判定结束步骤s46a或者s46b的处理后在规定时间以内是否存在完成操作的处理。规定时间作为一个
例子为5秒。
155.若控制部151判定存在完成操作(s47:yes),则判定是否通过脸识别部160进行了脸识别而取得了作业人员id信息(步骤s48)。控制部151重复执行步骤s48的处理。直至取得作业人员id信息。
156.若控制部151判定取得了作业人员id信息(s48:yes),则将关于在步骤s45中判断为正确的物品40的物品40的物品id信息以及在步骤s48中用于确定认证的作业人员的作业人员id信息建立关联而发送至管理服务器10(步骤s49)。由于将关于物品40的物品id信息与作业人员id信息建立关联而发送至管理服务器10,因此在管理服务器10中,能够把握每个作业人员的作业量、作业效率。
157.控制部151在结束步骤s49的处理后,结束一系列的处理(结束)。控制部151重复执行图13所示处理。控制部151再次执行步骤s41的处理而读取拣选的指示,从而拣选辅助机器人100移动至下一个拣选场所,若在步骤s42中接收了到达通知,则在步骤s43中在显示器中显示物品40的种类、个数等而待机。换言之,拣选辅助机器人100在货架之前不移动而待机,直至进行完成操作且通过脸识别取得作业人员id信息。另外,拣选辅助机器人100在进行了完成操作且通过脸识别取得了作业人员id信息后,进行移动。
158.需要说明的是,若控制部151在步骤s47中判定不存在完成操作(s47:no),则使流程返回步骤s44。这是因为由于拣选作业未完成,因此接收关于其他物品40的物品id信息。
159.另外,在控制部151于步骤s42、s44、s48的处理中判定为no而重复步骤s42、s44、s48的处理的次数达到规定次数(例如5次)的情况下,可以进行错误处理。错误处理是输出表示错误的声音、停止图13所示处理等。
160.《效果》
161.如上所述。作业人员走到拣选辅助机器人100待机的场所,一边观看在平板计算机150中显示的拣选的指示,一边将物品40放入箱部130a或者130b,从而能够完成该拣选场所处的拣选作业。因此,能够提供一种能够以作业人员可以高效进行物品40的拣选的方式进行辅助的拣选辅助机器人100以及拣选辅助系统1。
162.另外,能够通过rfid读取器140的天线142a、142b一并读取多个rfid签条41,作业人员能够高效且快速在短时间内进行拣选作业。特别是,在相同种类的物品40的数量较多的情况下,由于能够一并进行读取,因此作业效率大幅提高。这样的物品40的一个例子是口服药、注射药、或者外用治疗药等的医药品、口罩、或者其他医疗用的衣服、器具等。
163.另外,在将物品40放入箱部130a或者130b时,能够根据响应声音把握是否为正确的物品40。因此,作业人员能够正确拣选物品40,从而能够使作业效率提高。
164.另外,由于通过脸识别部160进行作业人员的认证,因此能够把握每个作业人员的作业量、作业效率。
165.另外,由于拣选辅助机器人100在货架之前不移动而待机,直至进行完成操作且通过脸识别取得作业人员id信息,因此通过进行按照作业人员的意图的移动,能够实现作业效率的提高。
166.另外,由于拣选辅助机器人100在进行了完成操作且通过脸识别取得作业人员id信息后进行移动,因此通过进行按照作业人员的意图的移动,能够实现作业效率的提高。
167.另外,由于拣选辅助机器人100依照关于位于与现在位置不同的位置的物品40的
拣选的指示,移动至配置有该物品40的货架等之前,因此通过进行按照作业人员的意图的移动,能够实现作业效率的提高。
168.另外,若事先设定拣选辅助机器人100在包装站5与存在货架6的区域之间自动往返,则作业人员能够专注于拣选作业,不需要返回包装站5,因此能够大幅提高作业效率。
169.另外,由于在包装站5自拣选辅助机器人100的箱部130a、130b取出物品40后,移动至拣选的指示中包含的位置而待机,因此作业人员能够专注于拣选作业,不需要返回包装站5将物品40自箱部130a、130b取出,因此能够使作业效率大幅提高。
170.另外,由于在箱部130a、130b的正上分别配置有天线142a、142b,因此即使已经在箱部130a、130b内容纳有包括具有金属制的包装等的物品、液体的物品,也能够通过天线142a、142b可靠读取通过入口131a、131b容纳于箱部130a、130b的物品的rfid签条。另外,能够抑制漏读取的产生。
171.另外,通过在箱部130a、130b的入口131a、131b设置天线142a、142b,读取了rfid签条41的物品40可靠地被放入箱部130a、130b,因此不需要确认被放入箱部130a、130b的作业,能够使作业效率提高。另外,通过自箱部130a、130b的上侧读取rfid签条41,因此即使在箱部130a、130b的内部中容纳有许多其他物品40的状态下,也能够可靠读取放入箱部130a、130b的物品40的rfid签条41。
172.另外,由于在箱部130a与天线142b之间设有屏蔽部170,因此能够使天线142a无法读取附于在箱部130b中容纳的物品的rfid签条。换言之,能够通过天线142a、142b正确读取被放入箱部130a、130b的物品40,能够抑制读取的失误。
173.《硬件构成》
174.图14是实施方式的管理服务器10以及平板计算机150的硬件构成图。管理服务器10以及平板计算机150具有cpu(central processing unit)1001、rom(read only memory)1002、ram(random access memory)1003。cpu1001、rom1002、ram1003形成所谓计算机。
175.另外,管理服务器10、平板计算机150具有辅助存储装置1004、显示装置1005、操作装置1006、i/f(interface)装置1007、以及驱动装置1008。需要说明的是,管理服务器10、平板计算机150的各硬件通过总线1009彼此连接。
176.cpu1001是用于执行在辅助存储装置1004中安装的各种程序的运算设备。
177.rom1002是非易失性存储器。rom1002作为用于储存cpu1001执行在辅助存储装置1004中安装的各种程序所需的各种程序、数据等的主存储设备起作用。具体而言,rom1002作为用于储存bios(basic input/output system)、efi(extensible firmware interface)等的引导程序等的、主存储设备起作用。
178.ram1003是dram(dynamic random access memory)、sram(static random access memory)等的易失性存储器。ram1003作为提供在辅助存储装置1004中安装的各种程序被cpu1001执行时所展开的作业区域的、主存储设备起作用。
179.辅助存储装置1004是用于存储各种程序、各种程序被执行时所使用的信息的辅助存储设备。
180.显示装置1005是用于显示管理服务器10以及平板计算机150的内部状态等的显示设备。
181.操作装置1006是供管理服务器10以及平板计算机150的管理者对管理服务器10以
及平板计算机150输入各种指示的输入设备。
182.i/f装置1007与网络50连接,是用于与管理服务器10以及平板计算机150进行通信的通信设备。
183.驱动装置1008是用于安置存储介质1010的设备。这里所说的存储介质1010包括cd-rom、软盘、磁光盘等那样的通过光、电或磁来记录信息的介质。另外,存储介质1010可以包括eprom(erasable programmable read only memory)、闪速存储器等那样的对信息进行电记录的半导体存储器等。
184.需要说明的是,在辅助存储装置1004中安装的各种程序例如通过发放的存储介质1010被安置于驱动装置1008,并且在该存储介质1010中存储的各种程序被驱动装置1008读取而进行安装。或者,在辅助存储装置1004中安装的各种程序可以通过i/f装置1007通过与网络50不同的其他网络下载而进行。
185.以上,对于本发明的示例的实施方式的拣选辅助机器人以及拣选辅助系统1进行了说明,但是本发明不限于具体公开的实施方式,可以不超过权利要求书的范围而进行各种变形、变更。
186.需要说明的是,本国际申请要求基于2020年8月27日申请的日本国专利申请2020-143905的优先权,并且在本国际申请中在此通过参照而引用其全部内容。
187.附图标记说明
188.1拣选辅助系统
189.10管理服务器
190.40物品
191.41rfid签条
192.50网络
193.100、100a、100b、100c拣选辅助机器人
194.101拣选指示管理部
195.102拣选指示储存部
196.103地图制作部
197.104id信息接收部
198.105计数部
199.106拣选状况管理部
200.110搬运车
201.120车架
202.130a、130b箱部
203.140rfid读取器
204.141主体部
205.142a、142b天线
206.150平板计算机
207.160脸识别部
208.170屏蔽部
209.1001cpu
210.1002rom
211.1003ram
212.1004辅助存储装置
213.1005显示装置
214.1006操作装置
215.1007i/f装置
216.1008驱动装置
217.1009总线
218.1010存储介质
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1