一种柔性真空吸盘的技术及装置的制作方法
1.本发明涉及真空吸盘技术领域,尤其涉及一种柔性真空吸盘的技术及装置。
背景技术:
2.真空吸盘在现代工业中被大量用来中抓取物体,特别是在电子行业中有着非常广泛的应用,但真空吸盘的结构尺寸较大或者高,厚,并且是相对独立以点接触的方式,来吸附在被抓取的物体上,接触面积很小,不只容易对被吸附物体造成损伤(特别是用来吸液晶面板,容易造成液晶面板的压伤,留下吸盘印),并且在吸附的过程中无法对真空吸盘进行其他操作。
技术实现要素:
3.本发明的目是针对背景技术中存在的问题,提出一种将真空吸盘扁平化,柔性化,通多大面积巨量微小真空气囊来对平板或者曲面物体进行抓取,在抓取的过程中可以根据位置可随时调整抓取位置的吸力调整,适用范围广,效果好,实用性好的一种柔性真空吸盘的技术及装置。
4.本发明的技术方案:一种柔性真空吸盘的技术及装置,包括柔性张紧膜料和待抓取物体;
5.柔性张紧膜料两侧固定在柔性膜料装夹装置上进行固定,且柔性张紧膜料上设有膜带柔性真空吸盘;膜带柔性真空吸盘包括柔性真空吸盘上膜、柔性真空吸盘巨量微气囊装置、柔性真空吸盘下膜、和柔性真空吸盘接头;其中,柔性真空吸盘巨量微气囊装置内部分为柔性真空吸盘微气囊与柔性真空吸盘气囊支撑壁两种区域;
6.柔性真空吸盘巨量微气囊装置的一侧与柔性真空吸盘上膜贴合在一起,与中间柔性真空吸盘微气囊区域组合成形成微气囊,可以对待抓取物体进行抓取;柔性真空吸盘接头贴合在柔性真空吸盘上膜上,柔性真空吸盘上膜的对应区域开孔,并与边缘柔性真空吸盘微气囊区域相通;柔性真空吸盘下膜与柔性真空吸盘巨量微气囊装置的另外一侧边缘贴合在一起,在边缘的柔性真空吸盘微气囊区域形成空气流道;当通过柔性真空吸盘接头抽取空气时,空气会通过柔性真空吸盘上膜、柔性真空吸盘微气囊、柔性真空吸盘下膜之间形成的空气流道将柔性真空吸盘微气囊中间区域之间的空气抽走形成真空腔体,从而抓取待抓取物体,达到抓取待抓取物体的目的。
7.优选的,膜带柔性真空吸盘与柔性张紧膜料通过胶带固定,用于便于膜带柔性真空吸盘拆卸更换。
8.优选的,柔性真空吸盘微气囊区域是巨量的微气囊区域,柔性真空吸盘气囊支撑壁区域是填充无气囊区域。
9.优选的,采用柔性真空吸盘抓取待抓取物体的时候,可以在吸盘背面进行滚压,对被待抓取物体进行滚轮贴合或者其他操作。
10.优选的,采用柔性真空吸盘抓取物体的时候,可以分成多区域的微气孔区域,可以
分别控制每个区域的吸力,从而控制被抓取物体的局部脱离或者加固吸取力。
11.与现有技术相比,本发明具有如下有益的技术效果:
12.1、本发明能够实现将真空吸盘制造成柔性,可以贴合在其他柔性或者硬性物体表面,进而来抓取物体;
13.2、本发明突破了传统的真空吸盘点式接触被抓取物体,可以大面积接触被抓取物体表面,使被抓取物体受力更均匀,从而保护被抓取物体;
14.3、本发明可以实现在柔性吸盘背面进行其他动作,例如可以利用滚压,可以对被抓取物体进行贴合;
15.4、本发明制造的柔性吸盘,结构尺寸超薄,形状可以根据被抓取物体外形定制。
附图说明
16.图1为本发明一种实施例结构示意图;
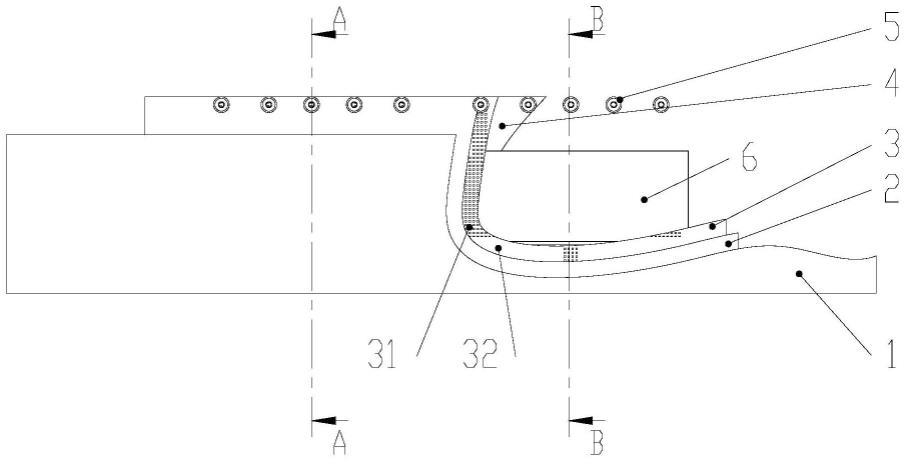
17.图2为图1的剖视图;
18.图3为图1的a-a处剖视图;
19.图4为图1的b-b处剖视图;
20.图5为图3的c处局部放大结构示意图;
21.图6为图1的俯视图;
22.图7为图1的爆炸结构示意图。
23.附图标记:1、柔性张紧膜料;2、柔性真空吸盘上膜;3、柔性真空吸盘巨量微气囊装置;31、柔性真空吸盘微气囊;32、柔性真空吸盘气囊支撑壁;4、柔性真空吸盘下膜;5、柔性真空吸盘接头;6、待抓取物体。
具体实施方式
24.实施例一
25.本发明提出的一种柔性真空吸盘的技术及装置,包括柔性张紧膜料1和待抓取物体6;如图1所示,柔性张紧膜料1两侧固定在柔性膜料装夹装置上进行固定,且柔性张紧膜料1上设有膜带柔性真空吸盘;膜带柔性真空吸盘包括柔性真空吸盘上膜2、柔性真空吸盘巨量微气囊装置3、柔性真空吸盘下膜4、和柔性真空吸盘接头5;其中,柔性真空吸盘巨量微气囊装置3内部分为柔性真空吸盘微气囊31与柔性真空吸盘气囊支撑壁32两种区域;如图3-7所示,柔性真空吸盘巨量微气囊装置3的一侧与柔性真空吸盘上膜2贴合在一起,与中间柔性真空吸盘微气囊31区域组合成形成微气囊,可以对待抓取物体6进行抓取;柔性真空吸盘接头5贴合在柔性真空吸盘上膜2上,柔性真空吸盘上膜2的对应区域开孔,并与边缘柔性真空吸盘微气囊31区域相通;柔性真空吸盘下膜4与柔性真空吸盘巨量微气囊装置3的另外一侧边缘贴合在一起,在边缘的柔性真空吸盘微气囊31区域形成空气流道;当通过柔性真空吸盘接头5抽取空气时,空气会通过柔性真空吸盘上膜2、柔性真空吸盘微气囊31、柔性真空吸盘下膜4之间形成的空气流道将柔性真空吸盘微气囊31中间区域之间的空气抽走形成真空腔体,从而抓取待抓取物体6,达到抓取待抓取物体6的目的;膜带柔性真空吸盘与柔性张紧膜料1通过胶带固定,用于便于膜带柔性真空吸盘拆卸更换;柔性真空吸盘微气囊31区域是巨量的微气囊区域,柔性真空吸盘气囊支撑壁32区域是填充无气囊区域;如图2所示,
采用柔性真空吸盘抓取物体的时候,可以分成多区域的微气孔区域,可以分别控制每个区域的吸力,从而控制被抓取物体的局部脱离或者加固吸取力。
26.本实施例中,本发明能够实现将真空吸盘制造成柔性,可以贴合在其他柔性或者硬性物体表面,进而来抓取物体;突破了传统的真空吸盘点式接触被抓取物体,可以大面积接触被抓取物体表面,使被抓取物体受力更均匀,从而保护被抓取物体;制造的柔性吸盘,结构尺寸超薄,形状可以根据被抓取物体外形定制。
27.实施例二
28.本发明提出的一种柔性真空吸盘的技术及装置,包括柔性张紧膜料1和待抓取物体6;
29.如图1所示,柔性张紧膜料1两侧固定在柔性膜料装夹装置上进行固定,且柔性张紧膜料1上设有膜带柔性真空吸盘;膜带柔性真空吸盘包括柔性真空吸盘上膜2、柔性真空吸盘巨量微气囊装置3、柔性真空吸盘下膜4、和柔性真空吸盘接头5;其中,柔性真空吸盘巨量微气囊装置3内部分为柔性真空吸盘微气囊31与柔性真空吸盘气囊支撑壁32两种区域;
30.如图3-7所示,柔性真空吸盘巨量微气囊装置3的一侧与柔性真空吸盘上膜2贴合在一起,与中间柔性真空吸盘微气囊31区域组合成形成微气囊,可以对待抓取物体6进行抓取;柔性真空吸盘接头5贴合在柔性真空吸盘上膜2上,柔性真空吸盘上膜2的对应区域开孔,并与边缘柔性真空吸盘微气囊31区域相通;柔性真空吸盘下膜4与柔性真空吸盘巨量微气囊装置3的另外一侧边缘贴合在一起,在边缘的柔性真空吸盘微气囊31区域形成空气流道;当通过柔性真空吸盘接头5抽取空气时,空气会通过柔性真空吸盘上膜2、柔性真空吸盘微气囊31、柔性真空吸盘下膜4之间形成的空气流道将柔性真空吸盘微气囊31中间区域之间的空气抽走形成真空腔体,从而抓取待抓取物体6,达到抓取待抓取物体6的目的;膜带柔性真空吸盘与柔性张紧膜料1通过胶带固定,用于便于膜带柔性真空吸盘拆卸更换;柔性真空吸盘微气囊31区域是巨量的微气囊区域,柔性真空吸盘气囊支撑壁32区域是填充无气囊区域;如图2所示,采用柔性真空吸盘抓取物体的时候,可以分成多区域的微气孔区域,可以分别控制每个区域的吸力,从而控制被抓取物体的局部脱离或者加固吸取力;
31.相较于实施例一,本实施例区别在于,采用柔性真空吸盘抓取待抓取物体6的时候,可以在吸盘背面进行滚压,对被待抓取物体6进行滚轮贴合或者其他操作。
32.本实施例中,本发明可以实现在柔性吸盘背面进行其他动作,提高对被待抓取物体6的贴合度。
33.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1