隐形眼镜自动吸取及释放机构的制作方法
1.本实用新型有关于隐形眼镜镜片的相关领域,尤其是一种隐形眼镜自动吸取及释放机构。
背景技术:
2.现有技术的隐形眼镜托盘10’用于放置隐形眼镜镜片。其中该隐形眼镜托盘10’上形成多个凹槽12’。因此可以将隐形眼镜镜片置于该凹槽12’。一般一隐形眼镜托盘10’中配置有该多个凹槽12’,以同时放置该多个隐形眼镜镜片。在图1的例子中显示现有技术的该隐形眼镜托盘10’上具有九个该凹槽12’,以三乘三的方式整齐配置在盘面上,因此可以一次放置该多个隐形眼镜镜片。
3.此种现有技术的该隐形眼镜托盘10’在收纳该隐形眼镜镜片时,该隐形眼镜镜片直接置放在该凹槽12’内部,而该隐形眼镜镜片的底面会贴附在该凹槽12’的边缘。一方面在取用该隐形眼镜镜片时相当不方便,并且,该隐形眼镜镜片的底面会紧密贴附在该凹槽12’的底部,而使得内部的空气不流通,长久以后会让该隐形眼镜镜片与该凹槽12’的底部的黏合力相当强。
4.在生产过程,往往需要从多个隐形眼镜托盘10’重复的撷取相当多的隐形眼镜镜片,所以必须配置多个人工进行此项作业。也有人工成本越来越高,增加了整个作业成本。
5.故本实用新型希望提出一种崭新的隐形眼镜自动吸取及释放机构,以解决上述现有技术上的缺陷。
技术实现要素:
6.所以本实用新型的目的为解决上述现有技术上的问题,本实用新型中提出一种隐形眼镜自动吸取及释放机构。本实用新型通过将该镜片吸附器移动以贴近隐形眼镜镜片,然后通过该气流管路对该空腔抽气而吸取隐形眼镜镜片,使得该隐形眼镜镜片脱离该凹槽的槽底。整体上可以自动化作业不需使用人工。并且,应用吸附器位移机构(或托盘驱动机构)、充放气机构及顶抵驱动机构而使得该镜片吸附器及该顶抵机构可以依序地对位该隐形眼镜托盘中的不同凹槽,而吸取该凹槽中的隐形眼镜镜片,所以本实用新型提供全自动化的操作,可以有效的节省生产作业中的人力及成本。
7.为达到上述目的本实用新型中提出一种隐形眼镜自动吸取及释放机构,用于在一隐形眼镜托盘中吸取隐形眼镜镜片,其中该隐形眼镜镜片配置于该隐形眼镜托盘内的凹槽,在通常的情况下,该凹槽内会注入液体,如水等,该隐形眼镜自动吸取及释放机构包括:一镜片吸附器应用真空吸力而吸附该隐形眼镜镜片;该镜片吸附器内部包括一空腔,该空腔的一端连接一气流管路,另一端形成至少一个抽气孔,该抽气孔与外部连通。使用时,将该镜片吸附器移动以贴近该隐形眼镜镜片,然后通过该气流管路对该空腔抽气,应用真空的吸附力而吸取该隐形眼镜镜片,使得该隐形眼镜镜片脱离该凹槽的槽底,因此可以从该隐形眼镜托盘吸取该隐形眼镜镜片;另外该镜片吸附器也可以对该空腔充气以释放该隐形
眼镜镜片并置于一镜片放置处。
8.进一步的,还包括一顶抵机构,操作时,该顶抵机构置于欲操作的该凹槽的下方,可以在该镜片吸附器吸取该隐形眼镜镜片时,顶底该凹槽的下方,而使得该凹槽往上突起,使得该隐形眼镜镜片脱离该凹槽的底部,以便于该镜片吸附器吸附该隐形眼镜镜片。
9.进一步的,还包括:
10.一吸附器驱动机构,该吸附器驱动机构包括:
11.一吸附器位移机构,通过一移动臂连接该镜片吸附器,用于移动该镜片吸附器至所需要的位置点以进行该镜片吸附器的操作;以及
12.一充放气机构,其通过括气流管路连通该空腔,以对该空腔进行充气及放气的动作。
13.进一步的,还包括一顶抵驱动机构连接该顶抵机构,用于驱动该顶抵机构到所需要的操作位置,并动作该顶抵机构使其顶底该凹槽的底部,以配合该镜片吸附器的动作。
14.进一步的,还包括一电控机构,该电控机构连接该吸附器驱动机构及该顶抵驱动机构,以控制该吸附器位移机构、该充放气机构及该顶抵机构的操作。
15.进一步的,还包括:
16.一托盘及吸附器驱动机构,该托盘及吸附器驱动机构包括:
17.一托盘驱动机构与该隐形眼镜托盘连接,用于移动该隐形眼镜托盘及该镜片放置处至所需要的位置,而使该镜片吸附器进行吸附该隐形眼镜镜片的动作;以及
18.一充放气机构,其通过该气流管路连通该镜片吸附器的该空腔,以对该空腔进行充气及放气的动作。
19.进一步的,还包括一顶抵驱动机构连接该顶抵机构,用于驱动该顶抵机构,使其顶底该凹槽的底部,以配合该镜片吸附器的动作。
20.进一步的,还包括一电控机构,该电控机构连接该托盘及吸附器驱动机构及该顶抵驱动机构,以控制该托盘驱动机构、该充放气机构及该顶抵驱动机构的操作。
21.由下文的说明可更进一步了解本实用新型的特征及其优点,阅读时并请参考附图。
附图说明
22.图1显示现有技术的隐形眼镜托盘;
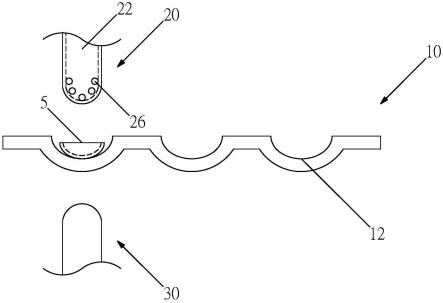
23.图2显示本实用新型的隐形眼镜镜片吸取操作的剖面示意图;
24.图3显示一般托盘及镜片放置处的立体图;
25.图4显示本实用新型第一实施例的结构示意图;
26.图5显示本实用新型第二实施例的结构示意图;
27.图6显示本实用新型第三实施例的方法的步骤流程图;
28.图7显示本实用新型第四实施例的方法的步骤流程图。
29.附图标记说明
30.5隐形眼镜镜片
31.10隐形眼镜托盘
32.10’隐形眼镜托盘
33.12凹槽
34.12’凹槽
35.20镜片吸附器
36.22空腔
37.24气流管路
38.26抽气孔
39.28移动臂
40.30顶抵机构
41.40镜片放置处
42.50吸附器驱动机构
43.50’托盘及吸附器驱动机构
44.52吸附器位移机构
45.54充放气机构
46.60顶抵驱动机构
47.70电控机构。
具体实施方式
48.兹谨就本实用新型的结构组成,及所能产生的功效与优点,配合附图,举本实用新型的一较佳实施例详细说明如下。
49.请参考图2至图5所示。其中本实用新型的隐形眼镜自动吸取及释放机构包括下列元件:
50.一隐形眼镜托盘10,用于放置多个隐形眼镜镜片5。其中该隐形眼镜托盘10包括至少一凹槽12。所以当该隐形眼镜镜片5置于该凹槽12内时,该凹槽12的槽底会贴附该隐形眼镜镜片5,而使得该隐形眼镜镜片5与该凹槽12的槽底产生黏着力。在通常的情况下,该凹槽12内会注入液体,如水等。
51.一般该隐形眼镜托盘10的材料为pe、ps、pvc、pet、pp等软性塑胶材质。但并不限于此列材质所制作的隐形眼镜托盘10,举凡具有上述型态的隐形眼镜托盘10均有可能。
52.一镜片吸附器20可应用真空吸力而吸附该隐形眼镜镜片5。该镜片吸附器20内部包括一空腔22,该空腔22的一端连接一气流管路24,另一端形成至少一个抽气孔26,该抽气孔26与外部连通。
53.使用时,将该镜片吸附器20移动以贴近该隐形眼镜镜片5,然后通过该气流管路24对该空腔22抽气,应用真空的吸附力而吸取该隐形眼镜镜片5,使得该隐形眼镜镜片5脱离该凹槽12的槽底,因此可以从该隐形眼镜托盘10吸取该隐形眼镜镜片5。另外该镜片吸附器20也可以对该空腔22充气,因此释放该隐形眼镜镜片5于一镜片放置处40。
54.本实用新型还包括一顶抵机构30,使用时,该顶抵机构30置于欲操作的凹槽12的下方,如图2所示。可以在该镜片吸附器20吸取该隐形眼镜镜片5时,顶底该凹槽12的下方,而使得该凹槽12往上突起,因此可以使得该隐形眼镜镜片5略微脱离该凹槽12的底部,以便于该镜片吸附器20吸附该隐形眼镜镜片5。
55.在实际的应用中因为该隐形眼镜托盘10分布着多个凹槽12,而隐形眼镜镜片5置
于各个凹槽12内,所以必须应用该镜片吸附器20一一地吸取各个隐形眼镜镜片5在置于旁边的该镜片放置处40。所以必须要有移动机构可以移动该镜片吸附器20到各个凹槽12以吸附该隐形眼镜镜片5。而且该顶抵机构30也必须产生对应的位移。
56.图4显示本实用新型的第一实施例。在此第一实施例中主要是移动该镜片吸附器20及该顶抵机构30使其落在该隐形眼镜托盘10的该凹槽12位置。
57.在本实用新型的第一实施例中还包括一吸附器驱动机构50,该吸附器驱动机构50包括:
58.一吸附器位移机构52通过一移动臂28连接该镜片吸附器20,用于移动该镜片吸附器20至所需要的位置点以进行该镜片吸附器20的操作。该吸附器位移机构52可以是马达或引擎等现有的驱动装置。
59.一充放气机构54,其通过该气流管路24连通该空腔22,以对该空腔22进行充气及放气的动作。当该充放气机构54经该气流管路24对该空腔22抽气时,可以吸附该隐形眼镜镜片5,使脱离该凹槽12的槽底;当该充放气机构54经该气流管路24对该空腔22充气时,可以释放该隐形眼镜镜片5于该镜片放置处40。
60.本实用新型第一实施例还包括一顶抵驱动机构60连接该顶抵机构30,用于驱动该顶抵机构30到所需要的操作位置,并动作该顶抵机构30使其顶底该凹槽12的底部,以配合该镜片吸附器20的动作,因此可以取出该隐形眼镜镜片5。
61.上述的吸附器位移机构52、充放气机构54及顶抵驱动机构60的机械结构为现有技术所熟知,举凡可以达到上述目的的机构结构均在本实用新型的范围之内,所以不另述其机构构造。
62.本实用新型第一实施例还包括一电控机构70,其中在图4的实施例中,该电控机构70连接该吸附器驱动机构50及该顶抵驱动机构60,以控制该吸附器位移机构52及该充放气机构54及该顶抵机构30,使得该吸附器位移机构52可以驱动该镜片吸附器20,以及使得该顶抵驱动机构60可以驱动该顶抵机构30至吸附及释放该隐形眼镜镜片5的位置,而且在这些位置处控制该充放气机构54对该镜片吸附器20进行充气及放气的作业。
63.图5显示本实用新型的第二实施例,其中该第二实施例中与第一实施例中相同的元件以相同的标号表示。在此第二实施例中主要是移动该隐形眼镜托盘10使其落在该镜片吸附器20的吸附位置。
64.在第二实施例中,本实用新型还包括一托盘及吸附器驱动机构50’,该托盘及吸附器驱动机构50’包括:
65.一托盘驱动机构56与该隐形眼镜托盘10连接,用于移动该隐形眼镜托盘10及该镜片放置处40至所需要的位置,而让该镜片吸附器20进行吸附该隐形眼镜镜片5的动作。
66.一充放气机构54,其通过该气流管路24连通该镜片吸附器20的该空腔22,以对该空腔22进行充气及放气的动作。当该充放气机构54经该气流管路24对该空腔22抽气时,可以吸附该隐形眼镜镜片5,使脱离该凹槽12的槽底;当该充放气机构54经该气流管路24对该空腔22充气时,可以释放该隐形眼镜镜片5于摆设的位置。
67.本实用新型第二实施例还包括一顶抵驱动机构60连接该顶抵机构30,用于动作该顶抵机构30使其顶底该凹槽12的底部,以配合该镜片吸附器20的动作,因此可以取出该隐形眼镜镜片5。
68.上述的托盘驱动机构56、充放气机构54及顶抵驱动机构60的机械结构为现有技术所熟知,举凡可以达到上述目的的机构结构均在本实用新型的范围之内,所以不另述其机构构造。
69.如图5所示,本实用新型第二实施例中还包括一电控机构70连接该托盘及吸附器驱动机构50’及该顶抵驱动机构60,以控制该托盘驱动机构56,该充放气机构54及该顶抵驱动机构60的操作,使得该隐形眼镜托盘10及该镜片放置处40移动至所需要的位置,而且在这些位置处控制该充放气机构54对该镜片吸附器20进行充气及放气的作业。
70.本实用新型还包括应用上述结构在隐形眼镜托盘10上吸取隐形眼镜镜片5的方法,如图6所示的第三实施例中,该方法包括下列步骤:
71.步骤300:将该镜片吸附器20移动以贴近该隐形眼镜镜片5,然后通过该气流管路24对该空腔22抽气,应用真空的吸附力而吸取该隐形眼镜镜片5,使得该隐形眼镜镜片5脱离该凹槽12的槽底,以此从该隐形眼镜托盘10吸取该隐形眼镜镜片5;
72.步骤400:将该镜片吸附器20移动到该镜片放置处40;对该镜片吸附器20的该空腔22充气,以此释放该隐形眼镜镜片5于该镜片放置处40;
73.因此完成该隐形眼镜镜片5的吸取及置放。本实用新型还可进行下列的动作:
74.步骤310:本实用新型还包括步骤为在步骤300中,动作该顶抵机构30使其顶底该凹槽12的底部,以配合该镜片吸附器20的动作,以此取出该隐形眼镜镜片5;
75.如果该隐形眼镜托盘10中还包括其他的隐形眼镜镜片5,则可进行下列的动作:
76.步骤410:应用该吸附器位移机构52通过该移动臂28动作该镜片吸附器20至所需要的位置点以进行另一隐形眼镜镜片5吸附的操作,即进行步骤300的操作;
77.步骤420:本实用新型还包括步骤为在步骤410中,该顶抵驱动机构60驱动该顶抵机构30到吸附另一隐形眼镜镜片5操作的位置,并动作该顶抵机构30使其顶底该凹槽12的底部,以配合该镜片吸附器20的动作;
78.重复步骤410及步骤420到该隐形眼镜托盘10上所有的隐形眼镜镜片均被移至该镜片放置处40为止。
79.如图7所示的第四实施例中,在此第四实施例中以上述第三实施例中相同的步骤,以相同的编号表示。在第四实施例中,本实用新型还包括应用上述结构在隐形眼镜托盘10上吸取隐形眼镜镜片5的方法,该方法包括下列步骤:
80.步骤300:将该镜片吸附器20移动以贴近该隐形眼镜镜片5,然后通过该气流管路24对该空腔22抽气,应用真空的吸附力而吸取该隐形眼镜镜片5,使得该隐形眼镜镜片5脱离该凹槽12的槽底,以此从该隐形眼镜托盘10吸取该隐形眼镜镜片5;
81.步骤500:该托盘驱动机构56移动该隐形眼镜托盘10及该镜片放置处40到该镜片吸附器20的下方;对该镜片吸附器20的该空腔22充气,释放该隐形眼镜镜片5于该镜片放置处40;
82.以此完成该隐形眼镜镜片5的吸取及置放。本实用新型还可进行下列的动作:
83.步骤310:在步骤300中,动作该顶抵机构30使其顶底该凹槽12的底部,以配合该镜片吸附器20的动作,以此取出该隐形眼镜镜片5;
84.如果该隐形眼镜托盘10中还包括其他的隐形眼镜镜片5,则可进行下列的动作:
85.步骤560:该托盘驱动机构56移动该隐形眼镜托盘10及该镜片放置处40至所需要
的位置,而使该镜片吸附器20进行另一隐形眼镜镜片5吸附的操作,即进行步骤300的操作;
86.步骤570:在步骤560中,该顶抵驱动机构60驱动该顶抵机构30到吸附另一隐形眼镜镜片5操作的位置,并动作该顶抵机构30使其顶底该凹槽12的底部,以配合该镜片吸附器20的动作;
87.重复步骤560及步骤570到该隐形眼镜托盘10上所有的隐形眼镜镜片均被移至该镜片放置处40为止。
88.本实用新型通过将该镜片吸附器移动以贴近隐形眼镜镜片,然后通过该气流管路对该空腔抽气而吸取隐形眼镜镜片,使得该隐形眼镜镜片脱离该凹槽的槽底。整体上可以自动化作业不需使用人工。并且,应用吸附器位移机构(或托盘驱动机构)、充放气机构及顶抵驱动机构而使得该镜片吸附器及该顶抵机构可以依序地对位该隐形眼镜托盘中的不同凹槽,而吸取该凹槽中的隐形眼镜镜片,所以本实用新型提供全自动化的操作,可以有效的节省生产作业中的人力及成本。
89.上列详细说明针对本实用新型的一可行实施例的具体说明,惟该实施例并非用以限制本实用新型的专利范围,凡未脱离本实用新型技艺精神所为的等效实施或变更,均应包括于本实用新型的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1