一种步伐式稳定搬送机构的制作方法
1.本实用新型属于搬送机构技术领域,具体涉及一种步伐式稳定搬送机构。
背景技术:
2.板件使机械加工过程中经常使用的物料,在板件运输过程中,由于板件长条的形状,容易造成板件叉叠,现有的搬送机构由于结构上的缺陷,存在以下不足:
3.1.自动化程度不高,搬送过程中,容易移位;
4.2.适配性不高,无法适应不同长度的板件。
技术实现要素:
5.针对上述背景技术所提出的问题,本实用新型的目的是:旨在提供一种步伐式稳定搬送机构。
6.为实现上述技术目的,本实用新型采用的技术方案如下:
7.一种步伐式稳定搬送机构,包括机台、两个支架、一个所述支架通过机台上的两列第一滑轨滑块滑动安装,另一个所述支架与机台固定连接,滑动端的所述支架连接有左定位机构,固定端的所述支架连接有右定位机构,所述左定位机构、右定位机构结构形状相同,固定端的所述支架外侧连接有压紧机构,两个所述支架的端部连接有落料斜板,所述支架的一端连接有顺板机构,滑动端的所述支架两侧分别连接有丝杠螺母机构,两个所述丝杠螺母机构的另一端通过皮带连接有第一电机;
8.所述支架包括底板、与底板呈垂直关系的竖板、连接两竖板的内板,所述落料斜板连接在内板的端部;
9.所述右定位机构包括定位主板、沿定位主板上表面间隔一定距离分布的下压块、以及两列对称竖直分布的承载板,所述承载板与内板之间通过横向滑轨滑块滑动连接,所述承载板与定位主板之间通过竖向滑轨滑块滑动连接,两个所述承载板连接有共同的齿条,所述齿条的侧面连接有第三伸缩气缸,所述第三伸缩气缸的输出端与定位主板固定连接,所述齿条啮合连接有齿轮,所述右定位机构端的齿轮与左定位机构端的齿轮通过转轴连接,所述支架连接有电动伸缩杆,所述电动伸缩杆的输出端与齿条固定连接。
10.进一步限定,所述压紧机构包括横向支架,所述横向支架沿长度方向均匀连接有若干第一伸缩气缸,所述第一伸缩气缸的输出端连接有上压块,这样的结构设计,通过第一伸缩气缸提供动力,使得上压块可以下压配合下压块,完成夹紧操作。
11.进一步限定,所述机台的中部连接有中部支撑杆,所述中部支撑杆的端部同样连接有落料斜板,所述落料斜板的旁侧设有若干倾斜分布的滚轮,这样的结构设计,通过中部支撑杆对较长的板件的中部进行支撑,避免两端支撑的形式造成板件下凹,通过倾斜分布的滚轮便于板件落料。
12.进一步限定,所述支架的两端设有向内的行程开关,所述行程开关分布在齿条的两端,这样的结构设计,通过行程开关确定齿条的前后运动距离。
13.进一步限定,所述顺板机构包括第二伸缩气缸,与第二伸缩气缸输出端连接的夹板,这样的结构设计,通过两支第二伸缩气缸顶出,来使夹板靠拢,使刚上料的板件左右方向摆放到位。
14.本实用新型的有益效果:
15.1.自动化程度高,以步伐式的搬送模式对板件进行搬运,搬运过程中,不会产生移位;
16.2.适配性高,能够适应不同长度的板件。
附图说明
17.本实用新型可以通过附图给出的非限定性实施例进一步说明;
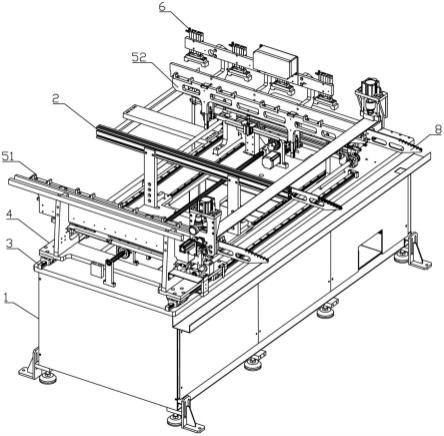
18.图1为本实用新型一种步伐式稳定搬送机构实施例的第一结构示意图;
19.图2为本实用新型一种步伐式稳定搬送机构实施例的俯视结构示意图;
20.图3为本实用新型一种步伐式稳定搬送机构实施例的侧视结构示意图;
21.图4为本实用新型一种步伐式稳定搬送机构实施例的第二结构示意图;
22.图5为本实用新型一种步伐式稳定搬送机构实施例中顺板机构的安装图;
23.图6为本实用新型一种步伐式稳定搬送机构实施例中右定位机构的结构示意图;
24.图7为本实用新型一种步伐式稳定搬送机构实施例中压紧机构的结构示意图;
25.图8为本实用新型一种步伐式稳定搬送机构实施例中落料斜板的结构示意图;
26.主要元件符号说明如下:
27.机台1;
28.中部支撑杆2;
29.第一滑轨滑块3;
30.支架4、底板41、竖板42、内板43;
31.左定位机构51、右定位机构52、定位主板521、下压块522、承载板523;
32.压紧机构6、第一伸缩气缸61、上压块62;
33.电动伸缩杆71、齿条72、齿轮73、第三伸缩气缸74、第一电机75、丝杠螺母机构76、行程开关77、转轴78;
34.落料斜板8、滚轮81;
35.顺板机构92。
具体实施方式
36.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
37.如图1-8所示,本实用新型的一种步伐式稳定搬送机构,包括机台1、两个支架4、一个支架4通过机台1上的两列第一滑轨滑块3滑动安装,另一个支架4与机台1固定连接,滑动端的支架4连接有左定位机构51,固定端的支架4连接有右定位机构52,左定位机构51、右定位机构52结构形状相同,固定端的支架4外侧连接有压紧机构6,两个支架4的端部连接有落料斜板8,支架4的一端连接有顺板机构92,滑动端的支架4两侧分别连接有丝杠螺母机构76,两个丝杠螺母机构76的另一端通过皮带连接有第一电机75;
38.支架4包括底板41、与底板41呈垂直关系的竖板42、连接两竖板42的内板43,落料斜板8连接在内板43的端部;
39.右定位机构52包括定位主板521、沿定位主板521上表面间隔一定距离分布的下压块522、以及两列对称竖直分布的承载板523,承载板523与内板43之间通过横向滑轨滑块滑动连接,承载板523与定位主板521之间通过竖向滑轨滑块滑动连接,两个承载板523连接有共同的齿条72,齿条72的侧面连接有第三伸缩气缸74,第三伸缩气缸74的输出端与定位主板521固定连接,齿条72啮合连接有齿轮73,右定位机构52端的齿轮73与左定位机构51端的齿轮73通过转轴78连接,支架4连接有电动伸缩杆71,电动伸缩杆71的输出端与齿条72固定连接。
40.本案实施中,板件首先进行上料,上料后板件摆放在两个支架4的内板43上表面,通过顺板机构92规范板件的摆放位置,随后第三伸缩气缸74的输出端伸出,顶起定位主板521,定位主板521通过竖向滑轨滑块滑动,下压块522叉起板件,板件从内板43上表面抬升,电动伸缩杆71运动,带动承载板523运动,承载板523通过横向滑轨滑块滑动,并带动定位主板521横向运动,定位主板521的运动距离为下压块522之间的间距,从而使板件运动一步,形成步伐式的搬送模式,另一端的左定位机构51的运动,由转轴78将动力传递给齿轮73,形成同步运动,每运动一步,压紧机构6即下压,配合下压块522,避免板件移位,随后第三伸缩气缸74复位,电动伸缩杆71复位,重复搬运过程,即可将上料处的板件向某一方向搬运,直至下料,下料时,则通过落料斜板8完成,当运动到最远端的板件位于落料斜板8上时,下压块522复位,由于倾斜的坡度,板件下滑,完成落料,在上述过程中,板件搬送以步伐式形态自动搬动,自动化程度较高,且搬送过程中不会移位;
41.在提高适配性方面,一个支架4通过机台1上的两列第一滑轨滑块3滑动安装,滑动端的支架4连接有左定位机构51,滑动端的支架4两侧分别连接有丝杠螺母机构76,两个丝杠螺母机构76的另一端通过皮带连接有第一电机75,当第一电机75上电启动,通过皮带带动两个丝杠螺母机构76同步转动,支架4在丝杠螺母机构76的带动下,开始产生平动,从而调整左定位机构51与右定位机构52之间的距离,以达到适配不同尺寸板件的目的。
42.优选,压紧机构6包括横向支架,横向支架沿长度方向均匀连接有若干第一伸缩气缸61,第一伸缩气缸61的输出端连接有上压块62,这样的结构设计,通过第一伸缩气缸61提供动力,使得上压块62可以下压配合下压块522,完成夹紧操作。实际上,也可以根据具体情况具体考虑压紧机构6其它的结构形状。
43.优选,机台1的中部连接有中部支撑杆2,中部支撑杆2的端部同样连接有落料斜板8,落料斜板8的旁侧设有若干倾斜分布的滚轮81,这样的结构设计,通过中部支撑杆2对较长的板件的中部进行支撑,避免两端支撑的形式造成板件下凹,通过倾斜分布的滚轮81便于板件落料。实际上,也可以根据具体情况具体考虑进行中部支撑的其它的结构形状。
44.优选,支架4的两端设有向内的行程开关77,行程开关77分布在齿条72的两端,这样的结构设计,通过行程开关77确定齿条72的前后运动距离。实际上,也可以根据具体情况具体考虑确定齿条72运动位置的其它的结构形状。
45.优选,顺板机构92包括第二伸缩气缸,与第二伸缩气缸输出端连接的夹板,这样的结构设计,通过两支第二伸缩气缸顶出,来使夹板靠拢,使刚上料的板件左右方向摆放到位。实际上,也可以根据具体情况具体考虑顺板机构92其它的结构形状。
46.上述实施例仅示例性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1