一种智能化腕臂生产线用腕臂放料装置
1.本实用新型涉及腕臂生产辅助技术领域,具体是指一种智能化腕臂生产线用腕臂放料装置。
背景技术:
2.为了有效提高高铁接触网工程施工的质量和效率,常使用智能化腕臂生产线提高施工的效率与质量。
3.在智能化腕臂生产过程中,其生产步骤依次为自动上料,切割打孔达标,夹持定位并通过机器人进行移动,伺服拧紧,组装成品,组装后的成品需要依次放置在放料装置上,之后打包以进行运输,现有的放料装置结构简单,成品腕臂放置在放料装置上容易晃动,且放料装置位置移动不便,需要人工将成品腕臂放置在放料装置上。
技术实现要素:
4.本实用新型要解决的技术问题是解决以上问题,提供一种避免腕臂晃动,移动方便的一种智能化腕臂生产线用腕臂放料装置。
5.为解决上述技术问题,本实用新型提供的技术方案为:一种智能化腕臂生产线用腕臂放料装置,包括基板,所述的基板下方拐角处分别固定设有支撑杆,所述的支撑杆下方设有万向轮,所述的基板上方拐角处分别固定设有竖直板,所述的竖直板上端朝向基板的中心的一侧设有长方体的凹口,四个所述的凹口之间设有u形板一,所述的u形板一上方设有夹持机构一,所述的夹持机构一包括均匀设有在u形板一水平一侧上方的多个与u形板一竖直一侧平行的竖直板一,所述的u形板一与相邻竖直板一之间和相邻两个竖直板一之间皆设有垫层一,所述的竖直板一左右侧壁与u形板一竖直一侧靠近基板中心的侧壁皆固定设有限位板,所述的u形板一上方设有多个h形板,所述的h形板水平一侧上方设有同样的夹持机构一,所述的h形板水平一侧下方设有夹持机构二,所述的夹持机构二包括与竖直板一对应的竖直板二,所述的h形板与相邻竖直板二之间和相邻两个竖直板二之间分别设有同样的垫层二,所述的h形板上方设有倒置的u形板二,所述的u形板二水平一侧下方设有同样的夹持机构二。
6.作为改进,所述的支撑杆侧壁设有与万向轮配合的锁扣。
7.作为改进,所述的垫层一与垫层二皆采用橡胶材质。
8.作为改进,所述的垫层一与垫层二远离相邻的水平一侧的一端皆为内凹的曲面结构。
9.作为改进,所述的u形板一上方设有凹槽,所述的h形板竖直一侧下端设有与凹槽配合的插杆,上端设有同样的凹槽,所述的u形板二竖直一端设有同样的插杆。
10.作为改进,所述的凹槽内壁设有防滑纹。
11.本实用新型与现有技术相比的优点在于:本实用新型的智能化腕臂生产线用腕臂放料装置能够将成品腕臂分别放置在垫层一上方,使成品腕臂之间分离,通过限位板与垫
层二配合固定成品腕臂的位置,避免其移动,使成品腕臂能够依次固定排列在放料装置上,同时,放料装置下方设有万向轮,能够推动,移动方便,使成品腕臂能够直接从生产线上推入对应的垫层一内,减少搬运的麻烦,使操作人员操作更方便。
附图说明
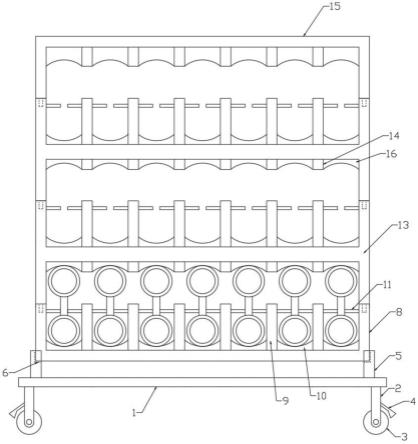
12.图1是本实用新型一种智能化腕臂生产线用腕臂放料装置的结构示意图。
13.图2是本实用新型一种智能化腕臂生产线用腕臂放料装置的h形板的结构示意图。
14.如图所示:1、基板;2、支撑杆;3、万向轮;4、锁扣;5、竖直板;6、凹口;7、插杆;8、u形板一;9、竖直板一;10、垫层一;11、限位板;12、凹槽;13、h形板;14、竖直板二;15、u形板二;16、垫层二。
具体实施方式
15.下面结合附图对本实用新型做进一步的详细说明。
16.结合附图1和附图2,一种智能化腕臂生产线用腕臂放料装置,包括基板1,所述的基板1下方拐角处分别固定设有支撑杆2,所述的支撑杆2下方设有万向轮3,使基板1移动方便,所述的基板1上方拐角处分别固定设有竖直板5,所述的竖直板5上端朝向基板1的中心的一侧设有长方体的凹口6,四个所述的凹口6之间设有u形板一8,所述的u形板一8上方设有夹持机构一,所述的夹持机构一包括均匀设有在u形板一8水平一侧上方的多个与u形板一8竖直一侧平行的竖直板一9,所述的u形板一8与相邻竖直板一9之间和相邻两个竖直板一9之间皆设有垫层一10,能够在各个垫层一10内依次放入成品腕臂,所述的竖直板一9左右侧壁与u形板一8竖直一侧靠近基板1中心的侧壁皆固定设有限位板11,能够将成品腕臂插入至垫层一10上方,使限位板11抵住成品腕臂中部的连接件,避免腕臂左右晃动。
17.所述的u形板一8上方设有多个h形板13,所述的h形板13水平一侧上方设有同样的夹持机构一,所述的h形板13水平一侧下方设有夹持机构二,所述的夹持机构二包括与竖直板一9对应的竖直板二14,所述的h形板13与相邻竖直板二14之间和相邻两个竖直板二14之间分别设有同样的垫层二16,使垫层二16与成品腕臂上方相贴,避免腕臂上下移动,h形板13的数量为多个,能够放置多个成品腕臂。
18.所述的h形板13上方设有倒置的u形板二15,所述的u形板二15水平一侧下方设有同样的夹持机构二,使垫层二16与成品腕臂上方相贴,避免位于上方腕臂上下移动,在u形板一8与u形板二15外侧缠绕捆绑绳能够对腕臂进行进一步的固定,方便进行运输。
19.所述的支撑杆2侧壁设有与万向轮3配合的锁扣4,使基板1能够固定位置。
20.所述的垫层一10与垫层二16皆采用橡胶材质,所述的垫层一10与垫层二16远离相邻的水平一侧的一端皆为内凹的曲面结构,与腕臂相配合,并对腕臂起保护作用。
21.所述的u形板一8上方设有凹槽12,所述的h形板13竖直一侧下端设有与凹槽12配合的插杆7,上端设有同样的凹槽12,所述的u形板二15竖直一端设有同样的插杆7,使h形板13与u形板一8、h形板13之间和h形板13与u形板二15之间相互连接,避免位置偏移。
22.所述的凹槽12内壁设有防滑纹,使h形板13与u形板一8、h形板13之间和h形板13与u形板二15之间连接更紧密。
23.本实用新型在具体实施时,用于智能化腕臂生产线的腕臂放料装置,将基板1推至
成品腕臂生产线末端一侧,在竖直板5之间的凹口6内放入u形板一8,移动基板1的位置使腕臂与其中一个垫层一10对应,将腕臂从生产线取出从装置一侧插入垫层一10内,减少搬运的路程,使操作人员操作更方便,使限位板11抵住腕臂之间的连接件,使腕臂的位置固定,避免其左右晃动,当垫层一10装满时,在u形板一8上方安装h形板13,使h形板13下方的垫层二16抵住腕臂,避免其上下移动,起固定作用,重复上述步骤将其余腕臂安装在h形板13上方的垫层一10内,h形板13数量为多个,可放置多层腕臂,最后将u形板二15安装在h形板13上方之后在u形板一8与u形板二15外侧缠绕捆绑绳能够对腕臂进行进一步的固定,方便进行运输。
24.同时,支撑杆2侧壁设有与万向轮3配合的锁扣4,使基板1能够固定位置;垫层一10与垫层二16皆采用橡胶材质,垫层一10与垫层二16远离相邻的水平一侧的一端皆为内凹的曲面结构,与腕臂相配合,并对腕臂起保护作用;u形板一8上方设有凹槽12,h形板13竖直一侧下端设有与凹槽12配合的插杆7,上端设有同样的凹槽12,u形板二15竖直一端设有同样的插杆7,使h形板13与u形板一8、h形板13之间和h形板13与u形板二15之间相互连接,避免位置偏移;凹槽12内壁设有防滑纹,使h形板13与u形板一8、h形板13之间和h形板13与u形板二15之间连接更紧密。
25.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1