一种基于机械挤出式供墨系统的生物管状物3D打印装置
一种基于机械挤出式供墨系统的生物管状物3d打印装置
技术领域
1.本实用新型属于三维物品制造技术领域,具体为一种基于机械挤出式供墨系统的生物管状物3d打印装置。
背景技术:
2.体内的很多组织和器官为管状结构,它们遍布在人体的各个部位,如:血管、淋巴管、肾小管、尿道等,他们承担着为身体各部位传输物质的作用。3d生物打印技术是利用生物材料、生物化学物质和活细胞的逐层精确定位来制作三维组织器官结构,有望解决现有的供体组织和器官缺乏的问题。
3.大部分3d生物打印机均由三维运动模块进行三维定位、喷头挤出模块挤出生物墨汁、成型功能模块辅助打印成型、以及辅助功能模块,这四部分组成。按照墨汁的挤出方式又分为激光辅助生物打印技术、喷墨式生物打印技术和挤出式生物打印技术。由于激光辅助打印技术的设备复杂和工艺复杂应用较少,喷墨打印技术需要加热会对细胞形成损伤,所以常用的供墨方式为挤出式供墨。挤出式供墨又分为气压挤出式、螺杆挤出式、和电机推动活塞挤出式三种类型。
4.目前的打印机大多采用的为气压挤出式供墨系统,气压具有一定的压缩性无法实现墨汁的精确可控挤出。气压挤出式供墨需要墨盒和气管紧密连接避免漏气,这一情况也导致换墨过程较繁琐。实现墨汁的精确可控供墨是提高打印效果的一个关键因素。同时打印环境也会影响到打印的三维生物结构中细胞的成活率,例如温度、无菌条件等,以及换墨过程中对打印环境的影响。
5.因此急需一种设有墨盒快速更换模块,进行墨盒快速固定与更换的3d打印装置;不仅可以使用不同容量的墨盒,以应对不同的打印要求;同时可实现两种墨汁的同时挤出,以及根据需要也可选择实现单种墨汁的挤出。
技术实现要素:
6.针对背景技术中存在的问题,本实用新型提供了一种基于机械挤出式供墨系统的生物管状物3d打印装置,其特征在于,包括:主固定板、两对墨盒直线模组、“l”形推块、两个微型压力传感器、两组一次性注射器、温控模块、两个墨盒固定装置、一对滑块基板、导槽基板、喷头、单轴旋转成形模块、合流三通和喷头安装架,其中主固定板垂直设置于主水平板上,温控模块固接于主固定板中部,平行的两组墨盒直线模组固接于主固定板的上部,喷头安装架安装于主固定板的中下部;单轴旋转成形模块位于喷头的正下方;合流三通安装于喷头安装架上,喷头插入合流三通下方的出口处;墨盒直线模组中墨盒模组滑块的上端面与“l”形推块中的两块相互垂直的直板中的一块栓接“l”形推块中的另一块直板通过微型压力传感器与所对因的一次性注射器的推杆相连;
7.所述导槽基板安装在温控模块的外表面,导槽基板的外表面开有用于安装滑块基板的对称的两根导槽;两块对称设置的滑块基板通过设在端面外的滑块插入对应的导槽
内;滑块基板的外侧栓接有一个墨盒固定装置,一次性注射器的针筒插入墨盒固定装置的墨盒固定孔内,两根针筒的出口分别通过橡胶软管与合流三通上方的一个入口相连。
8.所述单轴旋转成形模块由从下至上依次设置的成形模块底板、成形模块直线模组和旋转杆成形模块组成,其中旋转杆成形模块安装于成形模块直线模组的成形模组滑块上;
9.所述成形模块直线模组由成形模块水平支撑板、三块成形模块竖直支撑板、成形模组滑块、成形模组步进电机、成形模组蜗杆和模组杆轨道组成,其中三块成形模块竖直支撑板以一定间隔固接于成形模块水平支撑板上;成形模组步进电机固接于最外侧的一块成形模块水平支撑板上的侧面,成形模组蜗杆的两端分别与一块成形模块竖直支撑板转动连接,成形模组蜗杆通过联轴器与成形模组步进电机的动力输出轴相连;模组杆轨道与成形模组蜗杆平行设置,成形模组蜗杆和成形模组滑块螺纹连接,成形模组蜗杆和成形模组滑块滑动连接;
10.所述旋转杆成形模块由旋转杆模块底板、电机固定板、旋转杆头支撑板、旋转杆模块电机和旋转杆组成,其中电机固定板和旋转杆头支撑板固接于旋转杆模块底板的上端面,旋转杆模块电机固接于电机固定板的外侧,旋转杆模块电机的输出轴与电机固定板轴承连接,旋转杆的一端与旋转杆模块电机的输出轴通过联轴器相连,旋转杆的另一端与旋转杆头支撑板内侧的固定凹口接触连接。
11.所述墨盒直线模组包括:墨盒模组电机支架、墨盒模组蜗杆、墨盒模组滑块、墨盒模组大梁、墨盒模组滑轨和墨盒模组固定板,其中墨盒模组大梁与主固定板栓接,墨盒模组大梁的上下两侧分别一体固接有墨盒模组电机支架和墨盒模组固定板,墨盒模组蜗杆的两端与墨盒模组电机支架和墨盒模组固定板转动连接,与墨盒模组蜗杆平行设置的墨盒模组滑轨的两端与墨盒模组电机支架和墨盒模组固定板固接;墨盒模组蜗杆的上端伸入墨盒模组电机支架中,且通过墨盒模组电机联轴器与墨盒模组步进电机相连;墨盒模组滑块的中部与墨盒模组蜗杆螺纹连接,侧部与墨盒模组滑轨滑动连接。
12.所述墨盒直线模组中还包括隔板,隔板的两端分别与墨盒模组电机支架以及与墨盒模组固定板栓接,隔板设置于墨盒模组滑块和“l”形推块之间的缝隙中。
13.所述墨盒固定装置,包括:主体厚块、横向定位块和墨盒固定孔,其中主体厚块为矩形块,主体厚块的侧壁上一体固接有横向定位块,主体厚块的上端面开有用于固定针筒的墨盒固定孔。
14.所述墨盒固定孔的下端为伸出端,与墨盒固定孔过盈配合的针筒的下端由伸出端伸出,墨盒固定装置与滑块基板通过螺栓连接后组成墨盒模块,墨盒模块插入导槽基板中的导槽内。
15.所述滑块基板包括:主体扁板、横向定位槽、滑块连接部和滑块,其中主体扁板竖直设置,主体扁板的一侧顺序一体固接有滑块连接部和滑块,滑块与滑块连接部平行。
16.所述导槽基板包括:主体基板、导槽容纳凸起、导槽和导槽连接部,主体基板的一侧设有导槽容纳凸起;导槽容纳凸起上开有对称的两条导槽,导槽与导槽容纳凸起的侧面之间设有导槽连接部。
17.所述导槽入口侧的上下部与主体基板的侧壁之间设有倒角。
18.所述导槽连接部和所述导槽平行,导槽和滑块基板中滑块的形状倾角相匹配,导
槽连接部 96和滑块基板中滑块连接部的形状和倾角匹配;平行导槽与水平面呈5度~15度夹角。
19.本实用新型的有益效果在于:
20.1.采用了步进电机带动直线模组的方式推挤作为墨盒的一次性注射器,直线模组具有运动精度高的特点,通过控制步进电机的运动可以实现墨汁的高精度可控挤出,或者两种墨汁的同时挤出。
21.2.采用了医用一次性注射器直接容纳生物墨汁,可以保证生物墨汁所处环境为无菌环境。
22.3.墨盒固定装置可加工出不同的孔径,以实现对不同体积一次性注射器的使用。墨盒固定装置采用透明材料,可以另使用者直观的观测到一次性注射器内的墨汁余量。
23.4.墨盒固定装置与滑块作为一体使用。滑块与导槽插拔使用,可利用墨盒固定装置与滑块与导槽进行快速模块化换墨。
24.5.利用了微型压力传感器,结合数据采集卡可以实现直观观测生物墨汁的挤出压力。
25.6.设置于打印喷头下方的旋转杆成型模块以实现管状物的稳定成型,保证管状物内壁的质量。
26.7.打印喷头可以把两种生物墨汁以包裹结构挤出,还可以进行两种生物墨汁的单独挤出。结合旋转杆成型模块可以得到单层管状结构、或者管状包裹结构。
27.8.当步进电机以较小转速带动直线模组进行挤出生物墨汁时,再结合不同直径喷头,可以实现不同直径凝胶微球的打印,再结合生物手段可利用凝胶微球组装成管状物。
附图说明
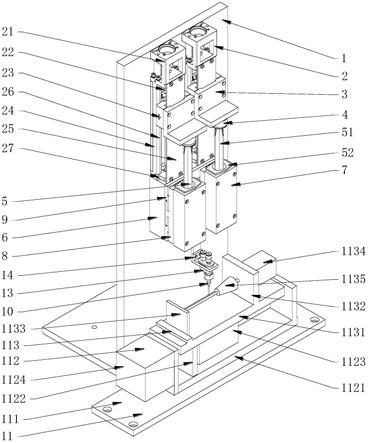
28.图1为本实用新型一种基于机械挤出式供墨系统的生物管状物3d打印装置实施例的结构示意图;
29.图2为本实用新型实施例的正视图;
30.图3为图2在a-a剖面的剖面图;
31.图4为本实用新型实施例中墨盒固定装置的正视图;
32.图5为本实用新型实施例中滑块基板的正视图;
33.图6为本实用新型实施例中导槽基板的正视图。
34.其中:
35.1-主固定板,2-墨盒直线模组,3-推块,4-微型压力传感器,5-一次性注射器,6-温控模块, 7-墨盒固定装置,8-滑块基板,9-导槽基板,10-喷头,11-单轴旋转成形模块,13-合流三通, 14-喷头安装架,21-墨盒模组电机支架,22-墨盒模组蜗杆,23-墨盒模组滑块,24-墨盒模组大梁,25-隔板,26-墨盒模组滑轨,27-墨盒模组固定板,51-推杆,52-针筒,71-主体厚块,72
‑ꢀ
横向定位块,73-墨盒固定孔,74-墨盒固定通孔,81-主体扁板,82-横向定位槽,83-滑块连接部,84-滑块,85-螺纹通孔,91-主体基板,92-导槽容纳凸起,93-基板固定孔,94-喷头架安装孔,95-导槽,96-导槽连接部,111-成形模块底板,112-成形模块直线模组,113-旋转杆成形模块,731-伸入端,732-伸出端,951-倒角,1121-成形模块水平支撑板,1122-成形模块竖直支撑板,1123-成形模组滑块,1124-成形模组步进电机,1125-成形模组
蜗杆,1131-旋转杆模块底板,1132-电机固定板,1133-旋转杆头支撑板,1134-旋转杆模块电机,1135-旋转杆,1136-锥形凸起。
具体实施方式
36.以下结合附图对本实用新型作进一步的详细说明。
37.如图1所示的本实用新型实施例,包括:主固定板1、两对墨盒直线模组2、“l”形推块 3、两个微型压力传感器4、两组一次性注射器5、温控模块6、两个墨盒固定装置7、一对滑块基板8、导槽基板9、喷头10、单轴旋转成形模块11、合流三通13和喷头安装架14,其中主固定板1垂直设置于主水平板上,温控模块6固接于主固定板1中部,平行的两组墨盒直线模组2固接于主固定板1的上部,喷头安装架14安装于主固定板1的中下部;合流三通13 安装于喷头安装架14上,喷头10插入合流三通13下方的出口处;单轴旋转成形模块11设置于主固定板1位于喷头安装架14的同侧,且在喷头10的正下方;墨盒直线模组2中墨盒模组滑块23的上端面与“l”形推块3中的两块相互垂直的直板中的一块栓接“l”形推块3中的另一块直板通过微型压力传感器4与所对因的一次性注射器5的推杆51相连。
38.导槽基板9栓接在温控模块6的外表面,导槽基板9的外表面开有用于安装滑块基板8 的对称的两根导槽95;两块对称设置的滑块基板8通过设在端面外的滑块84插入对应的导槽 95内;滑块基板8的外侧栓接有一个墨盒固定装置7,一次性注射器5的针筒52插入墨盒固定装置7的墨盒固定孔73内,两根针筒52的出口分别通过橡胶软管(图中未示出)与合流三通13上方的一个入口相连;微型压力传感器4、步进电机、单轴旋转成形模块11中成形模块直线模组112的成形模组步进电机1124和单轴旋转成形模块11中旋转杆成形模块113的旋转杆模块电机1134均与控制系统相连;
39.温控模块6中设有电阻丝加热设备(图中未示出),电阻丝加热设备与外部的智能恒温控制柜相连,智能恒温控制柜还与两个温度传感器相连;温度传感器插入墨盒固定装置7已经开好的预设孔(图中未示出)中,预设孔的位置几乎紧贴墨盒固定孔73以精确获得一次性注射器5内的生物材料的温度。
40.在本实施例中,所使用的温度传感器为pt100温度传感器;
41.在本实施例中,智能恒温控制柜采用ltd1-2402高精度半导体恒温系统,内部采用智能 pid控制器对温度进行调节,且可以对液体温度进行设定,显示精度为0.01℃,控温精度最高
±
0.1℃。
42.工作时,温度传感器实时监测针筒52的温度,并将检测到的温度传递给智能恒温控制柜,该温度传感器会实时监测墨盒的温度,实时调整输出功率,实现精确恒温控制。
43.如图1~图3所示的墨盒直线模组2,包括:墨盒模组电机支架21、墨盒模组蜗杆22、墨盒模组滑块23、墨盒模组大梁24、墨盒模组滑轨26和墨盒模组固定板27,其中墨盒模组大梁24与主固定板1栓接,墨盒模组大梁24的上下两侧分别一体固接有墨盒模组电机支架21 和墨盒模组固定板27,墨盒模组蜗杆22的两端分别与墨盒模组电机支架21和墨盒模组固定板27转动连接,与墨盒模组蜗杆22平行设置的墨盒模组滑轨26的两端分别与墨盒模组电机支架21和墨盒模组固定板27固接;墨盒模组蜗杆22的上端伸入墨盒模组电机支架21中,且通过墨盒模组电机联轴器(图中未示出)与墨盒模组步进电机(图中未示出)相连;墨盒模组滑块23的中部与墨盒模组蜗杆22螺纹连接,侧部与墨盒模组滑轨26滑动连接;
44.在本实施例中,墨盒直线模组2中还设有隔板25,隔板25的两端分别与墨盒模组电机支架21以及与墨盒模组固定板27栓接,隔板25设置于墨盒模组滑块23和“l”形推块3之间的缝隙中;
45.在本实施例中,对称设有两条墨盒模组滑轨26,且墨盒模组滑轨26的一侧贴紧墨盒模组大梁24。
46.如图1~图4所示的墨盒固定装置7,包括:主体厚块71、横向定位块72、墨盒固定孔73 和墨盒固定通孔74,其中主体厚块71为矩形块,主体厚块71的一侧壁上一体固接有横向定位块72,与横向定位块72相对的主体厚块71的侧壁上开有墨盒固定通孔74;主体厚块71 的上端面开有用于固定针筒52的墨盒固定孔73;
47.墨盒固定孔73的上端为伸入端731,下端为伸出端732;针筒52由伸入端731放入墨盒固定孔73中,针筒52下端由伸出端732伸出;墨盒固定孔73根据需要加工出不同的直径既可对不同容积的一次性注射器5中的针筒52进行固定;墨盒固定装置7与滑块基板8使用螺栓连接后组成墨盒模块,一同插入导槽基板9中的导槽95内,实现对墨盒固定装置7与滑块基板8的固定,最终实现一次性注射器5在竖直方向和水平方向的固定;
48.在本实施例中,主体厚块71的高度大于长宽,主体厚块71的高度和针筒52的长度匹配;
49.在本实施例中,针筒52与墨盒固定孔73过盈配合。
50.如图1~图3和图5所示的滑块基板8,包括:主体扁板81、横向定位槽82、滑块连接部 83、滑块84和螺纹通孔85,其中主体扁板81竖直设置,主体扁板81的一侧顺序一体固接有滑块连接部83和滑块84,主体扁板81上攻有位置和尺寸均与螺纹通孔85匹配的墨盒固定通孔74;滑块84与滑块连接部83平行;
51.在本实施例中,滑块84和滑块连接部83的外形均为矩形条状,且与水平面呈一个较小的锐角;
52.在本实施例中,用于固定墨盒固定装置7的螺栓穿过墨盒固定通孔74与螺纹通孔85锁紧。
53.如图1~图3和图6所示的导槽基板9,包括:主体基板91、导槽容纳凸起92、基板固定孔93、喷头架安装孔94、导槽95和导槽连接部96,主体基板91的一侧设有覆盖了几乎整个侧面的导槽容纳凸起92,在主体基板91的同侧设有被导槽容纳凸起92覆盖的位置均匀设有四个喷头架安装孔94,用于将导槽基板9和温控模块6之间的固定;导槽容纳凸起92上开有对称的两条导槽95,导槽95与导槽容纳凸起92的侧面之间设有导槽连接部96,导槽连接部 96和导槽95平行,导槽95和滑块84的形状倾角相匹配,导槽连接部96和滑块连接部83的形状和倾角匹配;
54.在本实施例中,导槽95入口侧的上下部与主体基板91的侧壁之间设有倒角951;
55.在本实施例中,平行导槽95和滑块84均与水平面呈5-15度角,该角度可使导槽95完全固定在滑块84内,角度过大则在更换墨盒过程中一次性注射器5的推杆51会与“l”形推块3 形成干涉,出现无法换墨的情况;
56.如图1~图3所示的单轴旋转成形模块11由从下至上依次设置的成形模块底板111、成形模块直线模组112和旋转杆成形模块113组成,其中旋转杆成形模块113安装于成形模块直线模组112的成形模组滑块1123上;
57.成形模块直线模组112由成形模块水平支撑板1121、三块成形模块竖直支撑板1122、成形模组滑块1123、成形模组步进电机1124、成形模组蜗杆1125和模组杆轨道(图中未示出) 组成,其中三块成形模块竖直支撑板1122以一定间隔固接于成形模块水平支撑板1121上;成形模组步进电机1124固接于最外侧的一块成形模块水平支撑板1121上的侧面,成形模组蜗杆 1125的两端分别与一块成形模块竖直支撑板1122转动连接,成形模组蜗杆1125通过联轴器 (图中未示出)与成形模组步进电机1124的动力输出轴相连;模组杆轨道与成形模组蜗杆1125 平行设置,成形模组蜗杆1125和成形模组滑块1123螺纹连接,成形模组蜗杆1125和成形模组滑块1123滑动连接;
58.旋转杆成形模块113由旋转杆模块底板1131、电机固定板1132、旋转杆头支撑板1133、旋转杆模块电机1134和旋转杆1135组成,其中电机固定板1132和旋转杆头支撑板1133固接于旋转杆模块底板1131的上端面,旋转杆模块电机1134固接于电机固定板1132的外侧,旋转杆模块电机1134的输出轴与电机固定板1132轴承连接,旋转杆1135的一端与旋转杆模块电机1134的输出轴通过联轴器(图中未示出)相连,旋转杆1135的另一端设有与旋转杆头支撑板1133内侧的锥形凸起1136接触连接的凹口;
59.在本实施例中,三块成形模块竖直支撑板1122的尺寸不同。
60.固定板1用来固定各个零部件。墨盒直线模组2通过联轴器(图中未示出)与步进电机(图中未示出)连接,由步进电机带动墨盒模组滑块23做直线运动;墨盒模组滑块23做直线运动时带动推块3与微型压力传感器4做直线运动,微型压力传感器4推动一次性注射器5,进而推挤出其内部的生物墨汁;从一次性注射器5中流出的生物墨汁经橡胶软管流入喷头10中,再从打印喷头10出口初流出到旋转杆成形模块113上,其中打印喷头10的竖直方向与旋转杆成形模块113垂直相交;旋转杆成形模块113固定在模块直线模组112上,由成形模组滑块1123 带动旋转杆成形模块113做直线运动,其中旋转杆成形模块113中的旋转杆1135可拆卸从而更换不同的直径及型号。
61.温控模块6固定在固定板1侧面,为生物墨汁保持温度的恒定;有斜槽的导槽基板9固定连接在温控模块上;一次性注射器5插入墨盒固定装置7中,实现墨盒的固定,其中对墨盒固定装置7加工出不同的通孔直径既可对不同容积的一次性注射器5进行固定;墨盒固定装置7 与滑块基板8固定连接,一同插入导槽基板9中的导槽内,实现对墨盒固定装置7与滑块基板 8的固定;在墨盒更换过程中,一次性注射器5预先插入墨盒固定装置7中,固定装置7与滑块基板8固定连接,三者作为一体使用,仅需滑块基板8与导槽基板9进行插拔,即可实现更换墨盒。
62.工作时,利用控制步进电机的不同转速实现墨汁挤出流量可控;进一步还可以实现两种墨汁的同时挤出或单种墨汁挤出的切换;设计有由一次性注射器5、墨盒固定装置7和滑块基板 8组成的墨盒快速更换模块,进行墨盒快速固定与更换;可使用不同容量的墨盒,以应对不同的打印要求;采用一次性注射器5作为墨盒保证打印环境;使用温控模块6以保持打印过程中的墨汁温度稳定在37度;具有管状物辅助成型功能,提高打印质量;通过微型压力传感器4 进行实时测量墨汁挤出压力功能,实现动态检测墨汁的挤出压力;由喷头10挤出的墨汁结合旋转杆成形模块113可以得到单层管状结构、或者管状包裹结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1