一种全向角度打印系统
1.本实用新型涉及机器人数控加工技术中的3d打印技术领域,尤其是涉及一种全向角度打印系统。
背景技术:
2.3d打印技术通过增加材料方式,实现物体的三维生成。通过cad软件设计 3d模型,然后将模型分层切片,最后打印机根据片层数据在特定的位置堆积材料,形成3d实体模型。
3.常用的3d打印方法有fdm、sla、sls等,其中fdm(熔融沉积成型法) 是由供料机构将颗粒状或线状材料输送至热熔喷头加热成半液态,然后从喷嘴挤出。机械臂沿着计算好的路径,涂覆在工作台上,进行多层堆叠,最后形成三维产品。
4.由于材料需要一层一层堆叠,所以每一层之间必须有一定的重叠,才能良好的粘合并且不发生塌陷,这种要求限制了打印物品表面打印位置切面与打印基础平面的夹角不能小于45
°
,导致fdm很难打印一些小角度表面物品,比如从垂直过度到水平的表面。
技术实现要素:
5.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种全向角度打印系统,通过打印底盘的电机蜗轮蜗杆,形成特定角度实现打印物品表面打印位置切面和底面角度小于45
°
的几何形状的打印。
6.本实用新型的目的可以通过以下技术方案来实现:
7.本实用新型的目的是保护一种全向角度打印系统,包括搅拌电机、机械臂连接支架、螺杆、加热管、喷嘴和打印底盘,打印物品在打印底盘上做增量化堆叠,还包括打印平台底座、第二调节电机、第二蜗杆蜗轮、第二旋转座、第一调节电机、第一蜗杆蜗轮、第一旋转座,其中具体地:
8.第二调节电机设于所述打印平台底座上;
9.第二蜗杆蜗轮与所述第二调节电机的输出端传动连接;
10.第二旋转座与所述第二蜗杆蜗轮传动连接,第二旋转座在所述第二蜗杆蜗轮的驱动下进行倾角调整;
11.第一调节电机设于所述第二旋转座上;
12.第一蜗杆蜗轮与所述第一调节电机的输出端传动连接;
13.第一旋转座与所述第一蜗杆蜗轮传动连接,第二旋转座在所述第一蜗杆蜗轮的驱动下进行倾角调整,所述第一旋转座与所述打印底盘固定连接。
14.进一步地,还包括第二基座,所述第二基座固定设于所述打印平台底座上,所述第二旋转座铰接于所述第二基座上。
15.进一步地,所述第二调节电机的输出端与所述第二蜗杆蜗轮的蜗杆端传动连接。
16.进一步地,所述第二蜗杆蜗轮的蜗轮中部通过连接轴与所述第二旋转座连接。
17.进一步地,还包括第一基座,所述第一基座固定设于所述第二旋转座上,所述第一
旋转座铰接于所述第一基座上。
18.进一步地,所述第一调节电机的输出端与所述第一蜗杆蜗轮的蜗杆端传动连接。
19.进一步地,所述第一蜗杆蜗轮的蜗轮中部通过连接轴与所述第一旋转座连接。
20.进一步地,所述第二调节电机和第一调节电机均为伺服电机。
21.进一步地,还包括mcu,所述mcu分别与所述第二调节电机和第一调节电机电连接。
22.进一步地,机械臂连接支架与工业机器人连接。
23.与现有技术相比,本实用新型的技术优势在于:
24.1)针对fdm打印的特点,开发了本打印系统,通过打印底盘的电机蜗轮蜗杆,形成特定角度实现打印物品表面打印位置切面和底面角度小于45
°
的几何形状的打印。
25.2)本技术方案中的全向角度打印系统可以调整打印平台的角度,使得打印物品打印位置表面和水平面尽可能接近垂直,打印小角度表面,增加斜面材料重叠面积,增强层之间黏合,提高产品力学性能,构造简洁,使用简单。
附图说明
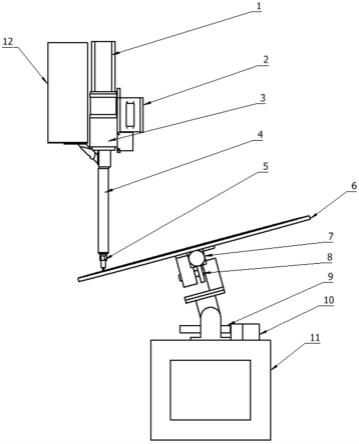
26.图1为本实用新型的结构图示(主视图);
27.图2为本实用新型的结构图示(俯视图);
28.图3为本实用新型的结构图示(左视图);
29.图4为本实用新型的结构图示(立体图);
30.图5为本实用新型的打印角度调整示意图(原理图);
31.图中标号:1搅拌电机;2机械臂连接支架;3螺杆;4加热管;5喷嘴;6打印底盘;7第一调节电机;8第一蜗杆蜗轮;9第二蜗杆蜗轮;10第二调节电机; 11打印平台底座;12料仓;13打印物品。
具体实施方式
32.下面结合附图和具体实施例对本实用新型进行详细说明。
33.本技术方案中如未明确说明的部件型号、材料名称、连接结构等特征,均视为现有技术中公开的常见技术特征。
34.如图1~4所示,所述工具由搅拌电机1、机械臂连接支架2、螺杆3、加热管4、喷嘴5、打印底盘6、第一调节电机7、第一蜗杆蜗轮8、第二蜗杆蜗轮9、第二调节电机10、打印平台底座11、料仓12组成。打印底盘6在底部电机蜗杆蜗轮传动系统,转换圆周运动为直线运动,使打印底盘6与喷嘴方向5(垂直地面)成一定的角度。
35.其中打印物品13在打印底盘6上做增量化堆叠,还包括打印平台底座11、第二调节电机10、第二蜗杆蜗轮9、第二旋转座、第一调节电机7、第一蜗杆蜗轮8、第一旋转座,其中具体地:
36.第二调节电机10设于所述打印平台底座11上;第二蜗杆蜗轮9与所述第二调节电机10的输出端传动连接;第二旋转座与所述第二蜗杆蜗轮9传动连接,第二旋转座在所述第二蜗杆蜗轮9的驱动下进行倾角调整;第一调节电机7设于所述第二旋转座上;第一蜗杆蜗轮8与所述第一调节电机7的输出端传动连接;第一旋转座与所述第一蜗杆蜗轮8传动连接,第二旋转座在所述第一蜗杆蜗轮8的驱动下进行倾角调整,所述第一旋转座与所述打印底
盘6固定连接。
37.还包括第二基座,所述第二基座固定设于所述打印平台底座11上,所述第二旋转座铰接于所述第二基座上。第二调节电机10的输出端与所述第二蜗杆蜗轮9的蜗杆端传动连接。第二蜗杆蜗轮9的蜗轮中部通过连接轴与所述第二旋转座连接。
38.还包括第一基座,所述第一基座固定设于所述第二旋转座上,所述第一旋转座铰接于所述第一基座上。第一调节电机7的输出端与所述第一蜗杆蜗轮8的蜗杆端传动连接。第一蜗杆蜗轮8的蜗轮中部通过连接轴与所述第一旋转座连接。
39.在倾角调整控制上,还包括mcu和人机交互触控屏,用户可以选择具体打印产品的三维图纸,mcu基于三维图纸通过现有算法简单地计算出打印过程中第一调节电机7和第二调节电机10的扭矩输出程序,以此实现打印平台底座11的倾角程序性变化过程,mcu分别与所述第二调节电机10和第一调节电机7电连接。第二调节电机10和第一调节电机7均为伺服电机。
40.工作过程如下图5:机械臂连接支架2与工业机器人连接,打印材料从料仓12 进入加热管4,搅拌电机1驱动螺杆3将材料送入加热管4,并从喷嘴5挤出。机器人机械臂通过连接模块2和整个打印功能组连接,并定位喷嘴5的空间位置。打印底盘6根据模型曲面、机械臂位置,用第一调节电机7、第二调节电机10、调节打印物品13打印位置表面切面和水平面成的角度,尽可能趋近于90
°
。这样角度下,挤出的每一层材料和前一层材料都达到97%以上重叠,能较好的粘合并且不容易坍塌,物品表面切面和底面角度所成角度就基本不再受到45
°
限制。
41.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用实用新型。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本实用新型不限于上述实施例,本领域技术人员根据本实用新型的揭示,不脱离本实用新型范畴所做出的改进和修改都应该在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1