一种3D打印用自动取料装置的制作方法
一种3d打印用自动取料装置
技术领域
1.本实用新型涉及3d打印技术,尤其涉及一种3d打印用自动取料装置。
背景技术:
2.3d打印属于快速成形技术的一种,它是一种数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层堆叠累积的方式来构造物体的技术,但是现有技术中的自动取料装置在用于3d打印时存在使用效率低和取料效果差等问题,因此我们提出了一种3d打印用自动取料装置。
技术实现要素:
3.为了克服现有技术的不足,本实用新型的目的之一在于提供一种3d打印用自动取料装置。
4.本实用新型的目的之一采用如下技术方案实现:
5.一种3d打印用自动取料装置,包括箱体,所述箱体的左侧内壁固定连接有平板,且平板的底部靠近左右两侧处分别固定连接有第一连接板,并且两个第一连接板相靠近的一侧侧壁分别通过轴承活动连接有同一个丝杆,所述丝杆上套接有第一伞形齿轮,且第一伞形齿轮上啮合有第二伞形齿轮,所述第二伞形齿轮的底部通过转轴和轴承活动连接有横板,且横板的左壁与箱体的左侧内壁固定连接,所述横板的顶部安装有电机,所述第二伞形齿轮底部上的转轴上套接有蜗轮,所述蜗轮上啮合有蜗杆,且蜗杆的左端与电机的输出轴固定连接,所述丝杆上安装有螺纹轮,且螺纹轮的顶部通过第一连接杆固定连接有第一滑块,并且平板上开设有与第一滑块相匹配的第一滑槽,所述第一滑块的顶部通过第二连接杆固定连接有移动板。
6.进一步的,所述移动板的上方设置有第一竖板,且第一竖板的底部固定连接有第二滑块,并且移动板上开设有与第二滑块相匹配的第二滑槽,所述第一竖板的左壁通过第三连接杆固定连接有回形板,且回形板内设置有凸轮,所述凸轮的底部靠近左侧处通过转轴和轴承与移动板的顶部活动连接,且转轴上套接有圆形齿轮,所述移动板的顶部靠近左侧处通过第二连接板固定连接有第一电动伸缩杆,且第一电动伸缩杆的右端固定连接有齿条板,所述齿条板的前壁安装有齿条,且齿条与圆形齿轮相啮合。
7.进一步的,所述第一竖板上开设有通孔,且第一竖板的左壁固定连接有第二电动伸缩杆,所述第二电动伸缩杆的右端穿过通孔的内圈,并延伸至第一竖板的右侧固定连接有移动块,所述移动块的顶部沿前后方向上分别通过转轴和轴承活动连接有活动杆,且活动杆的另一端通过转轴和轴承活动连接有v形杆,所述v形杆的左端通过转轴和轴承活动连接有连接块,且连接块的左壁与第一竖板的右壁固定连接,所述v形杆的右端固定连接有第二竖板,两个所述第二竖板相靠近的一侧侧壁分别安装有弹性夹板。
8.进一步的,所述箱体的底部固定连接有u形板,且u形板的内腔顶部通过螺孔活动连接有螺杆,所述螺杆的底端穿过螺孔的内圈,并延伸至u形板的下方通过轴承活动连接有
底板,所述螺杆上套接有第三伞形齿轮,且第三伞形齿轮上啮合有第四伞形齿轮,所述第四伞形齿轮的左壁通过转轴和轴承活动连接有第三连接板,且第三连接板的底部与底板的顶部固定连接,所述第四伞形齿轮上的转轴的左端穿过轴承的内圈,并延伸至第三连接板的左侧固定连接有圆板,并且圆板的左壁靠近顶部处固定连接有短杆。
9.进一步的,所述箱体的底部靠近左右两侧处分别固定连接有第三竖板,所述底板的顶部靠近左右两侧处分别固定连接有第四竖板,且两个第四竖板相远离的一侧侧壁分别固定连接有第三滑块,并且两个第三竖板上分别开设有与第三滑块相匹配的第三滑槽。
10.进一步的,所述底板的底部靠近左右两侧处分别固定连接有底座,且两个底座为左右对称设置。
11.进一步的,所述箱体的右壁安装有两个活动门,且两个活动门为左右对称设置。
12.相比现有技术,本实用新型的有益效果在于:
13.1、在本技术方案中,通过u形板、螺杆、短杆和圆板之间的相互配合,可实现对箱体进行有效的升降调节,使得箱体内的两个弹性夹板与打印机上的模型处于同一水平线,达到便于取料的目的,从而有效的提高了其使用效率;
14.2、在本技术方案中,通过第二电动伸缩杆、移动块和v形杆之间的相互配合,可实现对两个弹性夹板之间的间距进行有效的调节,使得其便于对打印机上的模型进行有效的夹取,达到取料的目的,从而有效的提高了其取料效率。
15.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
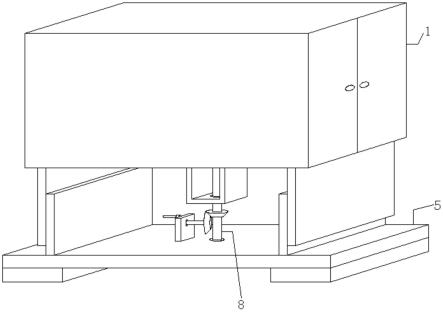
16.图1为本实施例的立体图;
17.图2为本实施例的结构示意图;
18.图3为图2中的a处放大图;
19.图4为图2中的b处放大图;
20.图5为图2中的部分俯视图。
21.图中:1、箱体;2、第二电动伸缩杆;3、电机;4、第三竖板;5、第四竖板;6、底板;7、第四伞形齿轮;8、螺杆;9、第三伞形齿轮;10、u形板;11、平板;12、第二竖板;13、v形杆;14、移动块;15、第一竖板;16、第一电动伸缩杆;17、齿条板;18、移动板;19、圆形齿轮;20、蜗杆;21、回形板;22、凸轮;23、第一伞形齿轮;24、丝杆;25、螺纹轮;26、第二伞形齿轮;27、蜗轮;28、弹性夹板。
具体实施方式
22.下面,结合附图以及具体实施方式,对本实用新型做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
23.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接
到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
24.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
25.请参阅图1至图5,一种3d打印用自动取料装置,包括箱体1,箱体1的左侧内壁固定连接有平板11,且平板11的底部靠近左右两侧处分别固定连接有第一连接板,并且两个第一连接板相靠近的一侧侧壁分别通过轴承活动连接有同一个丝杆24,丝杆24上套接有第一伞形齿轮23,且第一伞形齿轮23上啮合有第二伞形齿轮26,第二伞形齿轮26的底部通过转轴和轴承活动连接有横板,且横板的左壁与箱体1的左侧内壁固定连接,横板的顶部安装有电机3,第二伞形齿轮26底部上的转轴上套接有蜗轮27,蜗轮27上啮合有蜗杆20,且蜗杆20的左端与电机3的输出轴固定连接,丝杆24上安装有螺纹轮25,且螺纹轮25的顶部通过第一连接杆固定连接有第一滑块,并且平板11上开设有与第一滑块相匹配的第一滑槽,第一滑块的顶部通过第二连接杆固定连接有移动板18,移动板18的上方设置有第一竖板15,且第一竖板15的底部固定连接有第二滑块,并且移动板18上开设有与第二滑块相匹配的第二滑槽,第一竖板15的左壁通过第三连接杆固定连接有回形板21,且回形板21内设置有凸轮22,凸轮22的底部靠近左侧处通过转轴和轴承与移动板18的顶部活动连接,且转轴上套接有圆形齿轮19,移动板18的顶部靠近左侧处通过第二连接板固定连接有第一电动伸缩杆16,且第一电动伸缩杆16的右端固定连接有齿条板17,齿条板17的前壁安装有齿条,且齿条与圆形齿轮19相啮合,可实现对两个弹性夹板28进行有效的抖动,达到便于分离粘连模型的效果,解决了模型与打印机平台难以分离的问题,从而有效的提高了其便捷性;
26.第一竖板15上开设有通孔,且第一竖板15的左壁固定连接有第二电动伸缩杆2,第二电动伸缩杆2的右端穿过通孔的内圈,并延伸至第一竖板15的右侧固定连接有移动块14,移动块14的顶部沿前后方向上分别通过转轴和轴承活动连接有活动杆,且活动杆的另一端通过转轴和轴承活动连接有v形杆13,v形杆13的左端通过转轴和轴承活动连接有连接块,且连接块的左壁与第一竖板15的右壁固定连接,v形杆13的右端固定连接有第二竖板12,两个第二竖板12相靠近的一侧侧壁分别安装有弹性夹板28,通过第二电动伸缩杆2、移动块14和v形杆13之间的相互配合,可实现对两个弹性夹板28之间的间距进行有效的调节,使得其便于对打印机上的模型进行有效的夹取,达到取料的目的,从而有效的提高了其取料效率;
27.箱体1的底部固定连接有u形板10,且u形板10的内腔顶部通过螺孔活动连接有螺杆8,螺杆8的底端穿过螺孔的内圈,并延伸至u形板10的下方通过轴承活动连接有底板6,螺杆8上套接有第三伞形齿轮9,且第三伞形齿轮9上啮合有第四伞形齿轮7,第四伞形齿轮7的左壁通过转轴和轴承活动连接有第三连接板,且第三连接板的底部与底板6的顶部固定连接,第四伞形齿轮7上的转轴的左端穿过轴承的内圈,并延伸至第三连接板的左侧固定连接有圆板,并且圆板的左壁靠近顶部处固定连接有短杆,箱体1的底部靠近左右两侧处分别固定连接有第三竖板4,底板6的顶部靠近左右两侧处分别固定连接有第四竖板5,且两个第四竖板5相远离的一侧侧壁分别固定连接有第三滑块,并且两个第三竖板4上分别开设有与第
三滑块相匹配的第三滑槽,通过u形板10、螺杆8、短杆和圆板之间的相互配合,可实现对箱体1进行有效的升降调节,使得箱体1内的两个弹性夹板28与打印机上的模型处于同一水平线,达到便于取料的目的,从而有效的提高了其使用效率;
28.底板6的底部靠近左右两侧处分别固定连接有底座,且两个底座为左右对称设置,箱体1的右壁安装有两个活动门,且两个活动门为左右对称设置,起到便于使用的目的,第二电动伸缩杆2、电机3和第一电动伸缩杆16分别通过外接电源线电性连接有控制开关。
29.工作原理:在本技术方案中,首先通过短杆,短杆通过圆板带动第四伞形齿轮7转动,第四伞形齿轮7通过第三伞形齿轮9带动螺杆8转动,螺杆8通过u形板10带动箱体1向上或向下平移,可实现对箱体1进行有效的升降调节,使得箱体1内的两个弹性夹板28与打印机上的模型处于同一水平线,达到便于取料的目的,从而有效的提高了其使用效率,打开活动门,启动电机3,电机3通过输出轴带动蜗杆20转动,蜗杆20通过蜗轮27带动第二伞形齿轮26转动,第二伞形齿轮26通过第一伞形齿轮23带动丝杆24转动,丝杆24通过螺纹轮25带动第一滑块向左或向右平移,第一滑块通过第一竖板15带动两个弹性夹板28向左或向右平移,使得打印机上的模型位于两个弹性夹板28之间,启动第二电动伸缩杆2,第二电动伸缩杆2向右延伸或向左收缩,并带动移动块14向右或向左平移,移动块14通过两个活动杆带动两个v形杆13相向或反向平移,两个v形杆13分别通过第二竖板12带动两个弹性夹板28相向或反向平移,可实现对两个弹性夹板28之间的间距进行有效的调节,使得其便于对打印机上的模型进行有效的夹取,达到取料的目的,从而有效的提高了其取料效率,启动第一电动伸缩杆16,第一电动伸缩杆16向右延伸或向左收缩,并带动齿条板17向右或向左平移,齿条板17通过齿条带动圆形齿轮19转动,圆形齿轮19通过凸轮22带动回形板21左右往复运动,可实现对两个弹性夹板28进行有效的抖动,达到便于分离粘连模型的效果,解决了模型与打印机平台难以分离的问题,从而有效的提高了其便捷性。
30.上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属于本实用新型所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1