半自动焊接机的制作方法
1.本实用新型涉及医疗用具加工领域,具体涉及一种用于生产气管插管的半自动焊接机。
背景技术:
2.气管插管是在全麻手术或心肺复苏及伴有呼吸功能障碍的急危重症患者抢救过程中使用的重要医疗器械,传统的气管插管管体为一体式结构,不能很好的满足患者需求,若整体采用较软的材质,易造成插管困难和通气不足,若整体采用较硬的材质,则易造成鼻腔黏膜的损伤出血,为此,我公司设计一种分体式气管插管,如图1所示,气管插管包括通气管和焊接在通气管一端的软接头,通气管与软接头采用不同邵氏硬度的pvc材料制成,为此,我公司还设计了一种半自动焊接机,用于实现通气管与软接头的焊接,提高生产效率。
技术实现要素:
3.本实用新型的目的是针对现有技术的不足,提供一种半自动焊接机,用于实现构成气管插管的通气管和软接头的连接。
4.为实现上述目的,本实用新型的技术方案是这样实现的,一种半自动焊接机,包括机架,所述机架上安装有焊机本体、推送机构和限位机构,所述焊机本体包括正极块和负极块,套设有待焊件的芯轴一端插入限位机构中,所述限位机构包括通过端部固定板固定在机架上的限位套,所述限位套上设置有供芯轴插入的盲孔,所述推送机构包括沿芯轴轴向往复移动的推送夹爪气缸,正极块位于芯轴靠近限位机构一侧并通过焊接夹爪气缸实现沿芯轴径向的移动,所述负极块位于芯轴远离限位机构一侧并通过负极气缸实现沿芯轴径向的移动。
5.具体的,所述正极块通过固定在机架上的焊接夹爪气缸实现移动,焊接夹爪气缸的两个夹爪分别位于芯轴的上下两侧,所述正极块固定在焊接夹爪气缸的上夹爪上,正极块的下表面设置有弧形槽,焊接夹爪汽缸的下夹爪上固定有与正极块上下位置对应的焊接支撑块,焊接支撑块的顶面高度超出下夹爪的高度且同样设置有弧形槽。
6.具体的,所述推送夹爪气缸沿芯轴轴向的往复移动通过与伺服电机连接的滚珠丝杠实现,推送夹爪气缸与套设在滚珠丝杠上的滚珠螺母固定连接并随滚珠螺母做沿芯轴轴向的往复运动。
7.具体的,推送夹爪气缸的两个夹爪分别安装有前夹头和后夹头,所述前夹头呈l形。
8.具体的,所述负极块位于芯轴后侧并通过水平设置的导轴安装在负极块固定板上,导轴远离负极块的一端穿过负极块固定板套设有限位环,所述负极块固定板与沿芯轴径向伸缩的负极气缸连接,负极块面向芯轴的一侧设置有弧形槽,所述导轴上套设有弹簧,弹簧位于负极块和负极块固定板之间。
9.具体的,套设在芯轴上的软接头和通气管的外周还套设有石英管。
10.通过上述技术方案得到的一种半自动焊接机,其有益效果是:
11.1、通过焊接本体实现了气管插管的软接头和通气管的焊接,通过限位机构的设置保证了软接头和通气管的焊接位置准确,通过推送机构的设置保证了软接头和通气管的抵接,避免焊缝过大;
12.2、在固定正极块的焊接夹爪气缸的下夹爪上安装焊接支撑块以及l形前夹头的设置可以对芯轴形成支撑,避免正极块与软接头和通气管抵接时,芯轴从限位机构中脱出;
13.3、石英管的设置可以将软接头和通气管焊接过程中的变形限制在石英管内部,防止产生凸起,提高产品合格率。
附图说明
14.图1是所述分体式气管插管的结构示意图。
15.图2是所述半自动焊接机整体的结构示意图。
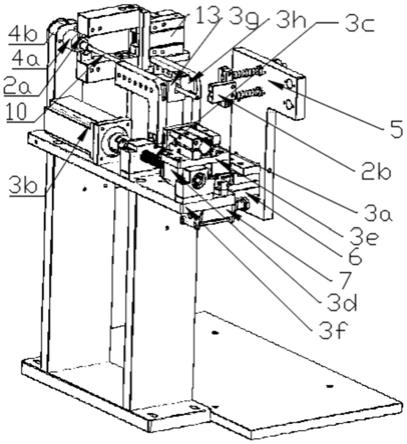
16.图3是所述半自动焊接机(不含机架)的立体示意图。
17.图4是所述半自动焊接机的正视图(不含机架)。
18.图5是所述半自动焊接机的侧视图(不含机架)。
19.图中,机架1;水平安装面1a;竖直安装面1b;焊机本体2;正极块2a;负极块2b;推送机构3;推送夹爪气缸3a;伺服电机3b;滚珠丝杠3c;滚珠螺母3d;丝杠连接板3e;固定主板3f;前夹头3g;后夹头3h;限位机构4;限位套4a;端部固定板4b;负极块固定板5;负极气缸固定板6;负极气缸7;导轴8;弹簧9;芯轴10;软接头11;通气管12;焊接夹爪气缸13;焊接支撑块14;焊接固定板15;带支撑底轮16;石英管17。
具体实施方式
20.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
21.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
22.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
23.本实用新型提供了一种半自动焊接机,包括机架1,所述机架1上安装有焊机本体2、推送机构3和限位机构4,所述焊机本体2包括正极块2a和负极块2b,待焊接的软接头11和
通气管12套设在芯轴上,负极块2b可与芯轴10抵接,正极块2a可与芯轴10上套设的软接头11和通气管12的邻接处抵接,焊机本体2利用正极块2a周围的高频磁场产生的热量对软接头11和通气管12进行加热,使两者焊接在一起,推送机构3用于推送芯轴10上的通气管12以保证通气管12与软接头11抵接,限位机构4位于芯轴10靠近正极块2a一端,起到固定芯轴的作用,同时保证软接头11与通气管12的抵接处正对正极块2a。
24.下面结合附图对本实用新型作进一步的说明。
25.如图所示,一种半自动焊接机,包括机架1,所述机架1上安装有焊机本体2、推送机构3和限位机构4,机架1底部设置有带支撑底轮16,所述焊机本体2包括正极块2a和负极块2b,套设有软接头11和通气管12的芯轴10一端插入限位机构4内,所述限位机构包括通过端部固定板4b固定在机架1上的限位套4a,所述限位套4a上设置有与芯轴10轴向一致的供待焊接软接头11插入的盲孔,所述推送机构3包括沿芯轴10轴向往复移动的推送夹爪气缸3a,推送夹爪气缸3a的两个夹爪分别位于芯轴10的前后侧用于推送套设在芯轴10上的通气管12,以与软接头11抵接,正极块2a位于芯轴10靠近限位机构4一侧的上方并通过焊接夹爪气缸13实现沿芯轴10径向的移动,所述负极块2b位于芯轴10远离限位机构4一侧,负极块2b通过负极气缸7实现沿芯轴10径向的移动。
26.具体的,所述机架1包括水平安装面1a和竖直安装面1b,所述端部固定板4b、推送机构3均安装在位于机架1内部的水平设置的固定主板3f上,端部固定板4b的顶端和推送夹爪气缸3a的夹爪穿出机架1的水平安装面1a,焊接夹爪气缸13通过l形焊接固定板15固定在固定主板3f上,所述焊接固定板15位于固定主板3f远离端部固定板4b一侧,焊接夹爪气缸13的两个夹爪穿出机架1的竖直安装面1b分别位于芯轴10的上下两侧。
27.所述正极块2a固定在焊接夹爪气缸13的上夹爪上,正极块2a的下表面设置有弧形槽,焊接夹爪气缸13设置在机架1内部,焊接夹爪汽缸的下夹爪上固定有与正极块2a上下位置对应的焊接支撑块,焊接支撑块的顶面高度超出下夹爪的高度且同样设置有弧形槽。
28.所述推送机构3沿芯轴10轴向的往复移动通过与伺服电机3b连接的滚珠丝杠3c实现,具体的,所述伺服电机3b安装在固定主板3f上并与沿芯轴10轴向设置的滚珠丝杠3c连接,推送夹爪气缸3a通过丝杠连接板3e与套设在滚珠丝杠3c上的滚珠螺母3d固定连接并随滚珠螺母3d做沿芯轴10轴向的往复运动,推送夹爪气缸3a的两个夹爪分别安装有前夹头3g和后夹头3h,其中前夹头3g呈l形可以对芯轴10起到一定的支撑作用,前夹头3g和后夹头3h相对面设置有避让芯轴10的沿芯轴10轴向设置的弧形槽。
29.所述负极块2b与穿出机架1竖向安装面、水平设置的导轴8一端连接,负极块2b面向芯轴10的一侧设置有弧形凹槽,导轴8另一端穿过位于机架1内的竖直设置的负极块固定板5并套设有限位环,导轴8的数量为两根,导轴8上套设有弹簧9,所述弹簧9位于负极块2b和负极块固定板5之间,所述负极块固定板5与负极气缸7的缸轴连接,负极气缸7通过负极气缸固定板6固定在固定主板3f底部,负极气缸固定板6一端穿出负极块固定板5并与负极块固定块5滑动连接,具体的,所述负极块固定板5上设置有供负极气缸固定板6穿出的通孔,通孔内固定有滑块,所述滑块在负极气缸固定板6顶面设置的滑轨上滑动。
30.更进一步的,所述软接头11和通气管12的外周还套设有石英管17,石英管17的内径略大于软接头11和通气管12的外径,焊接时,正极块2a与石英管17抵接,以防止软接头11和通气管12焊接过程中,受热融化的液体pvc在重力影响产生凸起,影响产品质量。
31.焊接时,首先将通气管12和软接头11分别套设在芯轴10上,软接头11前端的弧形壁与芯轴10端部抵接,将芯轴10插入限位套4a内,使软接头11的前端与限位套4a的盲孔底部抵接,推送夹爪气缸3a上的前夹头3g和后夹头3h相互靠拢使芯轴10落在推送夹爪气缸3a的前夹头3g上,推动通气管12使通气管12向软接头11方向移动,通气管12与软接头11抵接,负极块2b在负极气缸7作用下与芯轴10抵接,正极块2a在焊接夹爪气缸13的作用下与焊接支撑块对石英管17共同夹持,在磁场作用下,通气管12与软接头11受热融化焊接在一起。
32.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1