一种光催化协同自清洁抑菌环保塑粉加工工艺的制作方法
1.本发明涉及环保塑粉加工技术领域,尤其涉及一种光催化协同自清洁抑菌环保塑粉加工工艺。
背景技术:
2.塑粉是一种静电喷涂用热固性粉末涂料,有颗粒、粉末状,耐弱酸和弱碱,遇强酸发生分解,遇强碱发生腐蚀。不溶于水,溶于丙酮、酒精等有机溶剂中。苯酚与甲醛缩聚而得,由苯酚和甲醛在催化剂条件下缩聚、经中和、水洗而制成的树脂。
3.超疏水性是由水滴和表面之间有限的相互作用引起的,它是一种宏观现象:即覆盖有足够大超疏水区域的表面则可显示出超疏水性,而光催化活性是通过水和光催化剂表面之间的化学作用产生的,是一种分子现象:它基于光激发的电子空穴对和氧/水分子之间的相互作用,且空穴与水分子的相互作用是光催化反应,中最关键的步骤。因此,当表面被疏水性官能团覆盖的部分足够大(50%~70%)且结构合理时,表面可以排斥水滴,呈现超疏水性,同时这种表面不能完全抑制其非疏水部分与水分子的相互作用,从而为光催化提供必要条件。一方面,当灰尘颗粒沉积.在表面上时,水滴(例如雨水)可以在表面上滚动,从而带走灰尘颗粒;另一方面,沉积在表面上的有机污染物可以被光催化分解成co2和h20小分子。
4.目前,在塑粉表面裹覆特定的复合涂层是获得光催化协同自清洁功效的有效途径,但是,目前,现有的光催化协同自清洁抑菌环保塑粉加工工艺仍存在不足之处,现有的光催化协同自清洁抑菌环保塑粉加工工艺多是直接在固定的容器内部填充复合涂层溶液,在将加工完成的塑粉直接投放到容器内部,一定时间后,通过控制容器内部的滤板升降来完成塑粉颗粒的打捞,并人为转移到后续工序上,整体操作上,人为工作量较大,且打捞出的塑粉颗粒上回附着较多的涂层溶液,同时位于容易内部的塑粉颗粒之间会出现相互靠拢,导致涂层溶液附着的均匀度较差,从而降低了光催化协同自清洁抑菌环保塑粉加工工艺的使用效果。
技术实现要素:
5.本发明的目的在于:为了解决上述问题,而提出的一种光催化协同自清洁抑菌环保塑粉加工工艺。
6.为了实现上述目的,本发明采用了如下技术方案:一种光催化协同自清洁抑菌环保塑粉加工工艺,所述光催化协同自清洁抑菌环保塑粉加工工艺采用的加工装置包括有壳体、下料板与投料口,所述加工装置还包括有:设置在壳体后端面的驱动机构,驱动机构包括有固定安装在壳体后端面伸缩气缸以及与壳体活动配合的伺服电机,所述伺服电机外表壁固定安装有与伸缩气缸输出端固定连接的连接框,所述伺服电机输出端固定安装有驱动轴,所述驱动轴外表壁通过传动带二传动连接有传动杆,传动杆纵向穿设在壳体后端面,所述驱动轴外表壁固定安装有齿轮六,所述齿轮六外表壁啮合连接有齿轮五,所述齿轮五内表壁固定安装有轴杆,且轴杆穿设在
壳体后端面;固定安装在连接框、用于对轴杆定位的定位环;固定在壳体后端面的固定座,所述固定座外表壁与传动带二之间之间设置有用于传动带二自动张紧的张紧部;所述轴杆外表壁固定安装有网板,所述网板底部一体成型有固定框,所述固定框内表壁活动安装有多组呈纵向分布的固定轴,所述固定轴外表壁均固定安装有辊筒;多组所述固定轴之间通过传动带一传动连接,且多组固定轴中的一组外表壁固定安装有齿轮二,所述固定框内表壁活动安装有连杆,所述连杆两端分别固定安装有齿轮三与齿轮四,所述齿轮三与齿轮二啮合连接,所述壳体纵向端内表壁开设有弧形凹槽,所述弧形凹槽内表壁固定安装有与齿轮四啮合连接的凸齿;所述传动杆远离传动带二的一侧固定安装有齿轮一;所述光催化协同自清洁抑菌环保塑粉加工工艺包括以下步骤:步骤一、将壳体内表壁注入涂层溶液,在将塑粉颗粒通过投料口投放到壳体内部;步骤二、塑粉颗粒落入到固定框内部的辊筒上,此时伺服电机先带动驱动轴进行逆时针转动,驱动轴通过传动带二联动传动杆,同时齿轮六与齿轮五啮合而带动轴杆以及网板进行转动,网板同步带动固定框与辊筒进行指定角度的偏转;步骤三、辊筒带动顶部的颗粒上行的同时将溶液中漂浮的颗粒进行集中,同时辊筒发生转动,使得塑粉颗粒外表壁各个位置都能均匀的接触溶液,直至到网板的一侧搭合在下料板上侧;步骤四、齿轮四脱离凸齿而接触齿轮一,伸缩气缸拉动连接框与伺服电机发生移动,齿轮五与齿轮六分离的同时,定位环压合在轴杆外表壁,使得轴杆带动网板以及固定框保持稳定,多组辊筒在固定框保持稳定时可继续保持转动,塑粉颗粒可快速的脱离辊筒并通过网板排出壳体,完成涂层附着,得到光催化协同自清洁抑菌环保塑粉。
7.优选地,所述投料口下方设置有导料屉,所述导料屉外表壁与壳体内表壁之间固定安装有弹簧,所述导料屉前端面固定安装有振动电机。
8.优选地,所述张紧部包括有支撑套,所述支撑套外表壁与固定座之间弹性连接有弹性件,所述支撑套内表壁与传动带二滑动连接。
9.优选地,所述壳体后端面开设有缺槽,所述连接框外表壁与缺槽内表壁滑动连接。
10.优选地,所述定位环呈“j”型结构,且所述定位环弧形端内表壁固定安装有弹性垫层。
11.优选地,所述壳体竖直端一侧内表壁设置有弧形边,所述固定框外表壁与弧形边相贴合。
12.优选地,所述轴杆远离齿轮五的一侧与壳体内表壁活动连接。
13.优选地,所述固定座与支撑套之间固定安装有伸缩设置的伸缩杆,所述伸缩杆外表壁与弹性件内表壁相贴合。
14.综上所述,由于采用了上述技术方案,本发明的有益效果是:1、本技术通过投料口将塑粉颗粒投放到壳体内部,由于辊筒与辊筒以及辊筒与支撑框之间的间隙是小于塑粉颗粒的粒径的,塑粉颗粒落入到固定框内部的辊筒上,此时伺服电机先带动驱动轴进行逆时针转动,驱动轴通过传动带二联动传动杆,同时齿轮六与齿
轮五啮合而带动轴杆以及网板进行转动,网板同步带动固定框与辊筒进行指定角度的偏转,在此过程中,辊筒带动顶部的颗粒上行的同时将溶液中漂浮的颗粒进行集中,且齿轮四会与弧形凹槽内部的凸齿啮合而带动齿轮三发生转动,齿轮三则通过与齿轮二的啮合而带动其中一组固定固定轴进行转动,多组固定轴则会在传动带一的作用下带动多组辊筒发生转动,以使得位于辊筒上部的塑粉颗粒发生活动,使得塑粉颗粒外表壁各个位置都能均匀的接触溶液,直至到网板的一侧搭合在下料板上侧,此时齿轮四脱离凸齿而接触齿轮一,伸缩气缸拉动连接框与伺服电机发生移动,齿轮五与齿轮六分离的同时,定位环压合在轴杆外表壁,使得轴杆带动网板以及固定框保持稳定,而伺服电机输出轴继续通过传动带二联动传动杆与齿轮一发生转动,使得多组辊筒在固定框保持稳定时可继续保持转动,此时的目的就是让塑粉颗粒可快速的脱离辊筒并通过网板排出壳体,避免塑粉颗粒粘附在辊筒上,从而提高了涂层附着的均匀性的同时降低了操作人员的工作强度。
15.2、本技术通过投料口落入到壳体内部的塑粉颗粒,会先落入到导料屉内部,而导料屉正好位于多组辊筒的上方,导料屉在导料的过程中,振动电机带动导料屉发生振动,使得塑粉颗粒会根据导料屉底部的网孔的分布呈批次往下落,避免了大量的塑粉颗粒的同时投入而带来的颗粒与颗粒之间的相互贴合,保证了塑粉颗粒,保证了塑粉颗粒的附着效率,同时还能够使得塑粉颗粒可以稳定的集中在多组辊筒的顶部,以此保证了塑粉颗粒涂覆作业的稳定进行。
附图说明
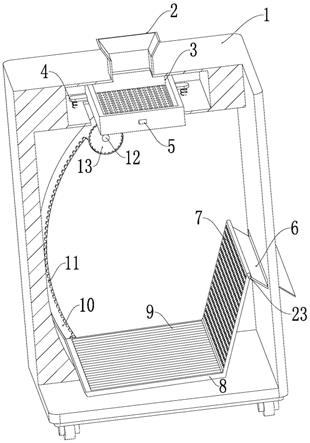
16.图1示出了根据本发明实施例提供的整体结构示意图;图2示出了根据本发明实施例提供的固定框的框结构示意图;图3示出了根据本发明实施例提供的弧形凹槽与齿轮一的结构示意图;图4示出了根据本发明实施例提供的导料屉的结构示意图;图5示出了根据本发明实施例提供的壳体与缺槽的结构示意图;图6示出了根据本发明实施例提供的定位环与连接框的结构示意图。
17.图例说明:1、壳体;2、投料口;3、导料屉;4、弹簧;5、振动电机;6、下料板;7、网板;8、固定框;9、辊筒;10、弧形凹槽;11、凸齿;12、传动杆;13、齿轮一;14、固定轴;15、齿轮二;16、齿轮三;17、齿轮四;18、传动带一;19、传动带二;20、固定座;21、支撑套;22、缺槽;23、轴杆;24、齿轮五;25、连接框;26、伸缩气缸;27、定位环;28、伺服电机;29、驱动轴;30、齿轮六;31、弹性件。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
19.请参阅图1-6,本发明提供一种技术方案:一种光催化协同自清洁抑菌环保塑粉加工工艺,光催化协同自清洁抑菌环保塑粉加工工艺采用的加工装置包括有壳体1、下料板6与投料口2,加工装置还包括有:
设置在壳体1后端面的驱动机构,驱动机构包括有固定安装在壳体1后端面伸缩气缸26以及与壳体1活动配合的伺服电机28,伺服电机28外表壁固定安装有与伸缩气缸26输出端固定连接的连接框25,伺服电机28输出端固定安装有驱动轴29,驱动轴29外表壁通过传动带二19传动连接有传动杆12,传动杆12纵向穿设在壳体1后端面,驱动轴29外表壁固定安装有齿轮六30,齿轮六30外表壁啮合连接有齿轮五24,齿轮五24内表壁固定安装有轴杆23,且轴杆23穿设在壳体1后端面;固定安装在连接框25、用于对轴杆23定位的定位环27;固定在壳体1后端面的固定座20,固定座20外表壁与传动带二19之间之间设置有用于传动带二19自动张紧的张紧部;轴杆23外表壁固定安装有网板7,网板7底部一体成型有固定框8,固定框8内表壁活动安装有多组呈纵向分布的固定轴14,固定轴14外表壁均固定安装有辊筒9;多组固定轴14之间通过传动带一18传动连接,且多组固定轴14中的一组外表壁固定安装有齿轮二15,固定框8内表壁活动安装有连杆,连杆两端分别固定安装有齿轮三16与齿轮四17,齿轮三16与齿轮二15啮合连接,壳体1纵向端内表壁开设有弧形凹槽10,弧形凹槽10内表壁固定安装有与齿轮四17啮合连接的凸齿11;传动杆12远离传动带二19的一侧固定安装有齿轮一13;通过投料口2将塑粉颗粒投放到壳体1内部,由于辊筒9与辊筒9以及辊筒9与固定框8之间的间隙是小于塑粉颗粒的粒径的,塑粉颗粒落入到固定框8内部的辊筒9上,此时伺服电机28先带动驱动轴29进行逆时针转动,驱动轴29通过传动带二19联动传动杆12,同时齿轮六30与齿轮五24啮合而带动轴杆23以及网板7进行转动,网板7同步带动固定框8与辊筒9进行指定角度的偏转,在此过程中,辊筒9带动顶部的颗粒上行的同时将溶液中漂浮的颗粒进行集中,且齿轮四17会与弧形凹槽10内部的凸齿11啮合而带动齿轮三16发生转动,齿轮三16则通过与齿轮二15的啮合而带动其中一组固定轴14进行转动,多组固定轴14则会在传动带一18的作用下带动多组辊筒9发生转动,以使得位于辊筒9上部的塑粉颗粒发生活动,使得塑粉颗粒外表壁各个位置都能均匀的接触溶液,直至到网板7的一侧搭合在下料板6上侧,此时齿轮四17脱离凸齿11而接触齿轮一13,伸缩气缸26拉动连接框25与伺服电机28发生移动,齿轮五24与齿轮六30分离的同时,定位环27压合在轴杆23外表壁,使得轴杆23带动网板7以及固定框8保持稳定,而伺服电机28的驱动轴29继续通过传动带二19联动传动杆12与齿轮一13,使齿轮一13发生转动,多组辊筒9在固定框8保持稳定时可继续保持转动,此时的目的就是让塑粉颗粒可快速的脱离辊筒9并通过网板7排出壳体1,避免塑粉颗粒粘附在辊筒9上,从而提高了涂层附着的均匀性的同时降低了操作人员的工作强度。
20.光催化协同自清洁抑菌环保塑粉加工工艺包括以下步骤:步骤一、将壳体1内表壁注入涂层溶液,在将塑粉颗粒通过投料口2投放到壳体1内部;步骤二、塑粉颗粒落入到固定框8内部的辊筒9上,此时伺服电机28先带动驱动轴29进行逆时针转动,驱动轴29通过传动带二19联动传动杆12,同时齿轮六30与齿轮五24啮合而带动轴杆23以及网板7进行转动,网板7同步带动固定框8与辊筒9进行指定角度的偏转;步骤三、辊筒9带动顶部的颗粒上行的同时将溶液中漂浮的颗粒进行集中,同时辊
筒9发生转动,使得塑粉颗粒外表壁各个位置都能均匀的接触溶液,直至到网板7的一侧搭合在下料板6上侧;步骤四、齿轮四17脱离凸齿11而接触齿轮一13,伸缩气缸26拉动连接框25与伺服电机28发生移动,齿轮五24与齿轮六30分离的同时,定位环27压合在轴杆23外表壁,使得轴杆23带动网板7以及固定框8保持稳定,多组辊筒9在固定框8保持稳定时可继续保持转动,塑粉颗粒可快速的脱离辊筒9并通过网板7排出壳体1,完成涂层附着,得到光催化协同自清洁抑菌环保塑粉。
21.需要说明的是:涂层溶液为tio2直接掺人聚二甲基硅氧烷而组成的,聚二甲基硅氧烷具有稳定且耐久的抗光降解性,所以涂层可使得塑粉颗粒在环境条件下长时间保持其性能。
22.壳体1上是配备有用于涂层溶液注入的注入口以及保持液位的液位传感器,以保证壳体1内部的涂层溶液高度不会高于下料板6的位置。
23.具体的,如图1与图4所示,投料口2下方设置有导料屉3,导料屉3外表壁与壳体1内表壁之间固定安装有弹簧4,导料屉3前端面固定安装有振动电机5。
24.投料口2落入到壳体1内部的塑粉颗粒,会先落入到导料屉3内部,而导料屉3正好位于多组辊筒9的上方,导料屉3在导料的过程中,振动电机5带动导料屉3发生振动,使得塑粉颗粒会根据导料屉3底部的网孔的分布呈批次往下落,避免了大量的塑粉颗粒的同时投入而带来的颗粒与颗粒之间的相互贴合,保证了塑粉颗粒的附着效率,同时还能够使得塑粉颗粒可以稳定的集中在多组辊筒9的顶部,以此保证了塑粉颗粒涂覆作业的稳定进行。
25.具体的,如图6所示,张紧部包括有支撑套21,支撑套21外表壁与固定座20之间弹性连接有弹性件31,支撑套21内表壁与传动带二19滑动连接,在齿轮五24与齿轮六30联动时,传动带二19通过支撑套21压缩弹性件31,而在伸缩气缸26拉动伺服电机28移动后,弹性件31复位并撑起传动带二19,以避免传动带二19出现松脱。
26.具体的,如图1与图6所示,壳体1后端面开设有缺槽22,连接框25外表壁与缺槽22内表壁滑动连接,连接框25外表壁刚好贴合在缺槽22内表壁,以保证伺服电机28移动的稳定,定位环27呈“j”型结构,且定位环27弧形端内表壁固定安装有弹性垫层,定位环27在伺服电机28移动之后压合在轴杆23外表壁,通过摩擦力实现轴杆23的定位,壳体1竖直端一侧内表壁设置有弧形边,固定框8外表壁与弧形边相贴合,弧形边轴心与轴杆23重合,以保证塑性边料导出时的完整,轴杆23远离齿轮五24的一侧与壳体1内表壁活动连接,以保证轴杆23的稳定,固定座20与支撑套21之间固定安装有伸缩设置的伸缩杆,伸缩杆外表壁与弹性件31内表壁相贴合,以避免弹性件31出现水平偏移。
27.综上所述,本实施例所提供的通过投料口2将塑粉颗粒投放到壳体1内部,由于辊筒9与辊筒9以及辊筒9与固定框8之间的间隙是小于塑粉颗粒的粒径的,塑粉颗粒落入到固定框8内部的辊筒9上,此时伺服电机28先带动驱动轴29进行逆时针转动,驱动轴29通过传动带二19联动传动杆12,同时齿轮六30与齿轮五24啮合而带动轴杆23以及网板7进行转动,网板7同步带动固定框8与辊筒9进行指定角度的偏转,在此过程中,辊筒9带动顶部的颗粒上行的同时将溶液中漂浮的颗粒进行集中,且齿轮四17会与弧形凹槽10内部的凸齿11啮合而带动齿轮三16发生转动,齿轮三16则通过与齿轮二15的啮合而带动其中一组固定轴14进行转动,多组固定轴14则会在传动带一18的作用下带动多组辊筒9发生转动,以使得位于辊
筒9上部的塑粉颗粒发生活动,使得塑粉颗粒外表壁各个位置都能均匀的接触溶液,直至到网板7的一侧搭合在下料板6上侧,此时齿轮四17脱离凸齿11而接触齿轮一13,伸缩气缸26拉动连接框25与伺服电机28发生移动,齿轮五24与齿轮六30分离的同时,定位环27压合在轴杆23外表壁,使得轴杆23带动网板7以及固定框8保持稳定,而伺服电机28的驱动轴29继续通过传动带二19联动传动杆12与齿轮一13,使齿轮一13发生转动,多组辊筒9在固定框8保持稳定时可继续保持转动,此时的目的就是让塑粉颗粒可快速的脱离辊筒9并通过网板7排出壳体1,避免塑粉颗粒粘附在辊筒9上,从而提高了涂层附着的均匀性的同时降低了操作人员的工作强度,投料口2落入到壳体1内部的塑粉颗粒,会先落入到导料屉3内部,而导料屉3正好位于多组辊筒9的上方,导料屉3在导料的过程中,振动电机5带动导料屉3发生振动,使得塑粉颗粒会根据导料屉3底部的网孔的分布呈批次往下落,避免了大量的塑粉颗粒的同时投入而带来的颗粒与颗粒之间的相互贴合,保证了塑粉颗粒的附着效率,同时还能够使得塑粉颗粒可以稳定的集中在多组辊筒9的顶部,以此保证了塑粉颗粒涂覆作业的稳定进行。
28.实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1