污染物控制系统和方法与流程
1.本发明涉及一种空气调节系统,更具体地说,本发明涉及一种污染物控制系统。
背景技术:
2.本世纪以来,以飞沫和气溶胶为主要传播途径的传染性疾病频繁出现,2003年的sars、2015年的mers以及2020年的covid-19,还有细菌性脑膜炎、水痘、普通感冒、流行性感冒、腮腺炎、结核、麻疹等长期与人类共存的呼吸道传染性疾病。这些传染性疾病对人类的健康带来了巨大的危险,如何在公共场所预防此类疾病成为刻不容缓的全球性问题。
3.目前,在诸如办公大楼之类的人口密度较大的封闭型建筑物内自然通风条件常常无法满足要求,常常会增设空气新风系统或空气净化设备来改善内部空气的质量。无论是新风系统和空气净化设备,它们都有需要将洁净的空气送入到室内空间中,并且将受到污染的空气抽离室内空间,从而达到保持室内空间中的空气洁净度的效果。然而,在实际使用过程中,发现由于室内空间气流流动的不确定性,新风系统和空气净化设备不能很好地杜绝交插感染。尤其是在办公楼的环境中,人与人常常面对面地办公,尽管可能会设置分隔板,但是,由于空调回风或新风回风通常为集中回风,使得空气会流经多个工位后才进入集中回风口,交叉传染的问题仍十分严重。
4.因此,如何能精细地控制目标空间内的气流避免细菌病毒的交叉传染仍是一个尚待解决的问题。
技术实现要素:
5.为克服现有技术的不足,本发明提供了一种针对目标空间的污染物控制系统,包括:出风装置,出风装置设置在目标空间的顶部或上部,出风装置具有向目标空间中送出气流的出风口;出风口中设置有导风件;回风装置,回风装置设置在目标空间的底部或下部,构造成允许目标空间的空气流出目标空间;目标空间包括目标区域,目标区域在水平方向上具有远离出风口的第一边界点和靠近出风口的第二边界点,出风装置在出风口的高度位置处提供的出风气流相对于水平面的夹角角度α基于第一边界点和第二边界点在水平方向中相对于出风口的水平距离以及第一边界点和第二边界点在垂直方向中相对于出风口的垂直距离确定,使气流的行进路径上覆盖目标区域的至少一部分或全部。
6.根据本发明的一个方面,出风口具有在水平方向中远离目标区域的外边缘和靠近目标区域的内边缘,在水平方向中,内边缘与第二边界点之间的水平距离为l1,在垂直方向中,内边缘与第二边界点之间的垂直距离为h1,角度α1=arctan(h1/l1),在水平方向中,外边缘与第一边界点之间的水平距离为l4,在垂直方向中,外边缘与第一边界点之间的垂直距离为h4,角度α4=arctan(h4/l4),角度α被控制为:α4≤α≤α1。
7.根据本发明的再一个方面,出风口具有在水平方向中远离目标区域的外边缘和靠近目标区域的内边缘,在水平方向中,外边缘与第二边界点之间的水平距离为l3,在垂直方向中,外边缘与第二边界点之间的垂直距离为h3,角度α3=arctan(h3/l3),在水平方向中,
内边缘与第一边界点之间的水平距离为l2,在垂直方向中,内边缘与第一边界点之间的垂直距离为h2,角度α2=arctan(h2/l2),角度α被控制为在α2和α3之间。
8.根据本发明的再一个方面,系统包括多个出风口和多个目标区域,多个出风口被包括在一个或多个出风装置中,多个出风口中的每一个分别对应多个目标区域中的一个。
9.根据本发明的再一个方面,污染物控制系统还包括空气净化装置,空气净化装置具有过滤组件和风机组件,空气净化装置安装在目标空间之内或之外,并且与回风装置和出风装置气体连通
10.根据本发明的再一个方面,出风口中设置有导风件,导风件与目标空间顶部的夹角角度θ对应于出风气流相对于水平面的角度α,角度θ被控制在30
°
至95
°
之间。
11.根据本发明的再一个方面,目标空间中包括阻挡气流流动的障碍物,目标区域设定在障碍物的上方,在垂直方向上,障碍物与目标区域之间的垂直距离为0-0.6m;目标区域的水平方向的宽度距离设定在0.1m-0.7m之间,目标区域的第二边界点在水平方向靠近或对齐障碍物的边缘,目标区域的第一边界点位于障碍物的边缘的更内侧,第二边界点与障碍物的边缘之间的水平距离在0.3m之内。
12.根据本发明的再一个方面,目标空间中存在污染物产生位点,污染物产生位点与目标区域的第二边界点重合,目标区域的第一边界点与污染物产生位点之间的水平距离为0.1m-0.7m。
13.根据本发明的再一个方面,一个回风装置和两个出风装置成组使用。此种组合能够有效地使面对面坐着办公的人员之间避免交叉感染,且利用一个回风装置对应更大范围的污染物目标区域,使回风装置的利用效用最大化。
14.根据本发明的再一个方面,一个回风装置和四个出风装置成组使用,其中回风装置设置在障碍物的正下方,四个出风装置分布在回风装置的至少两个方向上。
15.根据本发明的再一个方面,污染物控制系统还包括控制装置,控制装置构造成基于第一边界点和第二边界点在水平方向中相对于出风口的水平距离以及第一边界点和第二边界点在垂直方向中相对于出风口的垂直距离控制角度α。较佳,系统还包括人检知传感器,用于检测到人的位置;出风口中设置有导风件;导风件与目标空间顶部的夹角角度根据检测到的人的位置调节,以保持气流的行进路径上覆盖所述目标区域的至少一部分或全部。
16.此外,本发明还提供了一种污染物控制系统,其包括:出风装置,出风装置设置在目标空间的顶部或上部,出风装置具有向目标空间中送出气流的至少一个出风口;出风口中设置有导风件;回风装置,回风装置设置在目标空间的底部或下部,构造成允许目标空间的空气流出目标空间;污染物产生位点,污染物产生位点位于目标空间内;障碍物,障碍物布置在污染物产生位点的下方并且具有至少一个邻近污染物产生位点的近侧边缘;导风件与目标空间顶部的夹角角度θ根据出风口和障碍物的近侧边缘和/或污染物产生位点的位置确定。
17.根据本发明的一个方面,污染物产生位点在目标空间内的高度位置高于障碍物的高度位置,并且污染物从污染物产生位点起在障碍物的上方散布,污染物产生位点在障碍物的边缘之上或外侧并且污染物产生位点与障碍物之间的水平距离设定在0.3m之内,并且在垂直方向上,障碍物与污染物产生位点之间的垂直距离设定在0-0.6m的范围内。
18.根据本发明的另一个方面,出风口具有在水平方向中远离障碍物的外边缘和靠近障碍物的内边缘,从近侧边缘设定预设距离d,在水平方向中,内边缘与近侧边缘之间的距离为la,在垂直方向中,内边缘与近侧边缘之间的垂直距离为ha,角度β1=arctan(ha/la),在水平方向中,外边缘与近侧边缘之间的水平距离为lb,在垂直方向中,外边缘与近侧边缘之间的垂直距离为hb,角度β2=arctan[hb/(lb+d)],角度θ被控制为:β2≤θ≤β1。
[0019]
根据本发明的另一个方面,出风口具有在水平方向中远离障碍物的外边缘和靠近障碍物的内边缘,从近侧边缘设定预设距离d,在水平方向中,外边缘与近侧边缘之间的水平距离为lb,在垂直方向中,外边缘与近侧边缘之间的垂直距离为hb,角度β3=arctan(hb/lb),在水平方向中,内边缘与近侧边缘之间的水平距离为la,在垂直方向中,内边缘与近侧边缘之间的垂直距离为ha,角度β4=arctan[ha/(la+d)],角度θ被控制为在β3和β4之间。
[0020]
上述预设距离d可在0.1-1m之间。
[0021]
根据本发明的另一个方面,导风件与目标空间顶部的夹角角度θ可以根据障碍物的近侧边缘确定。污染物产生位点产生的污染物从障碍物的近侧边缘向远侧散布形成远侧边界点,出风口具有在水平方向中远离障碍物的外边缘和靠近障碍物的内边缘,在水平方向中,内边缘与障碍物的近侧边缘之间的水平距离为l5,在垂直方向中,内边缘与障碍物之间的垂直距离为h5,角度α5=arctan(h5/l5),在水平方向中,外边缘与远侧边界点之间的水平距离为h6,在垂直方向中,外边缘与障碍物之间的垂直距离为l6,角度α6=arctan(h6/l6),角度α被控制为在α6≤α≤α5。
[0022]
根据本发明的另一个方面,导风件与目标空间顶部的夹角角度θα可以根据障碍物的近侧边缘确定。污染物产生位点产生的污染物从障碍物的近侧边缘向远侧散布形成远侧边界点,出风口具有在水平方向中远离障碍物的外边缘和靠近障碍物的内边缘,在水平方向中,外边缘与障碍物边缘之间的水平距离为l7,在垂直方向中,外边缘与障碍物之间的垂直距离为h7,角度α7=arctan(h7/l7),在水平方向中,内边缘与远侧边界点之间的水平距离为l8,在垂直方向中,内边缘与障碍物之间的垂直距离为l8,角度α8=arctan(h8/l8),角度α被控制在α7和α8之间。
[0023]
根据本发明的再一个方面,出风口设有一个或多个导风件,一个导风件或多个导风件中的至少一个的相对于目标空间顶部的角度θ根据该导风件相对于障碍物的近侧边缘的位置确定,其中在水平方向中,一个导风件或多个导风件中的至少一个相对于障碍物的近侧边缘的水平距离为l9,在垂直方向中,一个导风件或多个导风件中的至少一个相对于障碍物的近侧边缘的垂直距离为h9,一个导风件或多个导风件中的至少一个的角度θ确定为α9
±
10
°
范围内,其中α9=arctan(h9/l9)。
[0024]
根据本发明的再一个方面,出风口设有一个导风件或多个导风件,一个导风件或多个导风件中的至少一个的相对于目标空间顶部的角度θ根据该导风件相对于污染物产生位点的位置确定,其中在水平方向中,一个导风件或多个导风件中的至少一个相对于污染物产生位点的水平距离为l10,在垂直方向中,一个导风件或多个导风件中的至少一个相对于污染物产生位点的垂直距离为h10,一个导风件或多个导风件中的至少一个的角度θ确定为α10
±
10
°
范围内,其中α10=arctan(h10/l10)。
[0025]
此外,可根据出风口的中央位置或出风口的外边缘相对于障碍物的近侧边缘的位置确定角度θ,其中在水平方向中,出风口的中央位置相对于障碍物的近侧边缘的水平距离
为l11,在垂直方向中,出风口的中央位置相对于障碍物的近侧边缘的垂直距离为h11,导风件中的至少一个的角度θ确定为α11
±
10
°
范围内,其中α11=arctan(h1/l11)。
[0026]
或者,其中在水平方向中,出风口外边缘相对于障碍物的近侧边缘的水平距离为l12,在垂直方向中出风口外边缘相对于障碍物的近侧边缘的垂直距离为h12,导风件中的至少一个的角度θ确定为α12
±
10
°
范围内,其中α12=arctan(h12/l12)。
[0027]
本发明还提供了一种气流控制方法,包括:将出风装置设置在目标空间的顶部或上部,所述出风装置具有向目标空间中送出气流的出风口;将回风装置设置在所述目标空间的底部或下部,构造成允许目标空间的空气流出所述目标空间;所述目标空间中设定目标区域,使所述目标区域在水平方向上具有远离所述出风口的第一边界点和靠近出风口的第二边界点,基于所述第一边界点和所述第二边界点在水平方向中相对于所述出风口的水平距离以及所述第一边界点和所述第二边界点在垂直方向中相对于出风口的垂直距离控制所述出风口的高度位置处所述出风装置提供的气流吹出角度α,使气流的行进路径覆盖所述目标区域的至少一部分或全部。
[0028]
本发明还提供了一种出风装置,包括:设置在出风口处的导风板;步进电机,所述步进电机构造成根据如上所述的气流控制方法对导风板的运转角度进行调节以对应多个不同的目标区域,使气流的行进路径覆盖所述目标区域的至少一部分或全部。
[0029]
采用根据本发明的污染物控制装置、气流控制方法和/或出风装置,能够控制目标空间中特定区域中的污染物的流动方向,避免目标空间中发生交叉感染或影响。尤其是当目标空间中有障碍物存在的情况下,也能有效地使污染物以最短路径从回风装置离开目标空间。
附图说明
[0030]
为了更完全理解本发明,可参考结合附图来考虑示例性实施例的下述描述,附图中:
[0031]
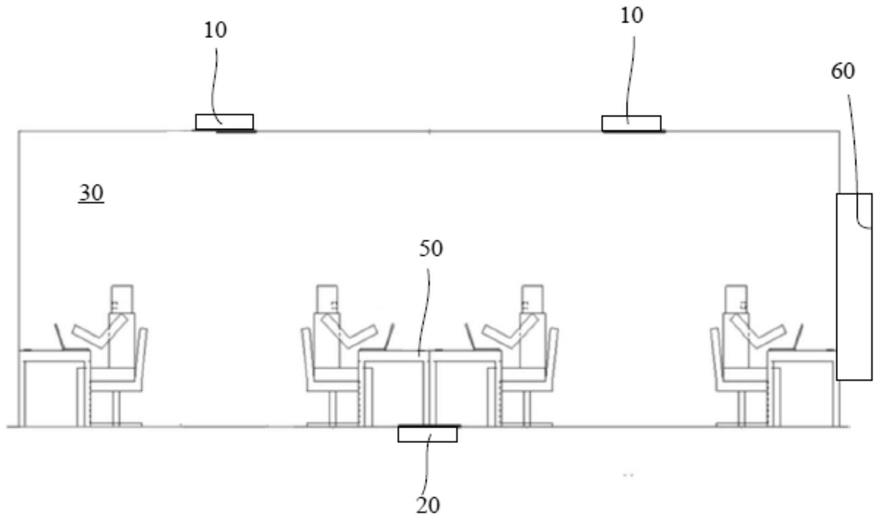
图1示出了应用根据本发明的较佳实施例的污染物控制系统的概念示意图。
[0032]
图2为根据本发明的较佳实施例的污染物控制系统的示意图,其中示出了出风装置的内边缘与目标区域的第二边界之间的位置关系。
[0033]
图3为根据本发明的较佳实施例的污染物控制系统的示意图,其中示出了出风装置的内边缘与目标区域的第一边界之间的位置关系。
[0034]
图4为根据本发明的较佳实施例的污染物控制系统的示意图,其中示出了出风装置的外边缘与目标区域的第二边界之间的位置关系。
[0035]
图5为根据本发明的较佳实施例的污染物控制系统的示意图,其中示出了出风装置的外边缘与目标区域的第一边界之间的位置关系。
[0036]
图6为适于根据本发明的较佳实施例的污染物控制系统的目标空间中的一种布置方式的俯视图。
[0037]
图7示出了采用按图6所示布置方式布置的根据本发明的污染物控制系统对目标空间进行气流控制处理之后的目标空间内的处理效果示意图。
[0038]
图8示出了采用根据本发明的污染物控制系统进行处理之后的目标空间内的另一处理效果示意图。
[0039]
图9示出了采用示出了采用根据本发明的污染物控制系统进行处理之后的目标空间内的另一处理效果示意图。
[0040]
图10a和图10b分别示出了采用空气净化器对目标空间进行处理时的目标空间布置方式的俯视图和处理后的效果示意图。
[0041]
图11a和图11b分别示出了采用空调室内机对目标空间进行处理时的目标空间布置方式的俯视图和处理后的效果示意图。
[0042]
图12a和图12b分别示出了采用空气处理设备对目标空间进行处理时的目标空间布置方式的俯视图和处理后的效果示意图。
[0043]
附图标记列表
[0044]
10 出风装置
[0045]
20 回风装置
[0046]
30 目标空间
[0047]
40 目标区域
[0048]
50 障碍物
[0049]
60 空气净化装置
具体实施方式
[0050]
下面结合具体实施例和附图对本发明作进一步说明,在以下的描述中阐述了更多的细节以便于充分理解本发明,但是本发明显然能够以多种不同于此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下根据实际应用情况作类似推广、演绎,因此不应以此具体实施例的内容限制本发明的保护范围。
[0051]
为了抑制污染物向上扩散从而扩散到别处,尤其是人员呼出气体中的污染物向上扩散并进一步扩散到其他人员处,本发明的一个具体实施方式是,通过设置在目标空间上方或上部的出风装置,按照大致对应人员呼出气体的角度进行送风,结合设置在目标空间下方或下部的回风装置从目标空间中吸风,通过送风和吸风形成气流场,污染物向上向外扩散的趋势被抑制,污染物会集中流向回风装置,离开目标空间,从而在人员附近形成安全区域(没有污染物或污染物浓度很低不足影响人员健康),降低目标空间中的交叉感染问题。
[0052]
出风装置送出气流的角度对抑制污染物向上扩散有很重要的作用,在本发明的一个具体实施方式中,通过出风装置的出风口相对污染区域(目标区域)的垂直距离和水平距离,确定出风气流的角度范围。这里的垂直距离通常是指两个相对位置之间铅垂于地面方向中的高度差。在本发明的另一个具体实施方式中,由于人员就坐时和障碍物(桌子)的距离、人员的坐高都有比较固定范围,因此,可以通过出风口和障碍物边缘(靠近人的位点)的垂直距离和水平距离确定送出气流的角度。
[0053]
在现场安装出风装置时,吊顶上的一些位置可能已经被灯具、消防喷淋头等占据,此时,可以选择空余的安装位置,通过上述角度的控制,实现控制污染物的效果。
[0054]
在本发明的一个具体实施方式中,通过一个较小的出风风速结合一个较大的回风风速,形成气流场抑制污染物向上扩散。如果出风风速较大,出风气流吹到障碍物表面后会形成反弹向上的回流,回流会将污染物向上带动扩散。回风装置的抽吸力,一个作用就是抑
制人员呼吸位置附近的回流,但是,如果出风风速太大,回风装置的抽吸力就无法抵消或抑制该回流,反而使得污染物被带动向上扩散,因此,较小的出风风速和较大的回风风速相结合是有利的。在本公开中,出风风速是指出风装置出风口处的风速,回风风速是指回风装置回风口处的风速。
[0055]
本发明具体实施方式中的污染物控制系统,可以应用在办公室、会议室,对人员呼出的污染物进行控制,也可以是针对例如打印机之类的产生的污染物进行控制,也可以拓展到其他合适的场景中。
[0056]
图1示出了应用根据本发明的较佳实施例的污染物控制系统的概念示意图。该污染物控制系统尤其适用在诸如办公室之类的室内空间,该室内空间在较佳实施例中又被称为目标空间30。应当理解,目标空间30可以指整个室内空间,也可以指室内空间中的一个连续的空间部分。室内空间例如布置有办公桌,该办公桌构成了目标空间内的障碍物50,这里的障碍物尤其包括在目标空间30的竖直方向中对气流流动造成阻碍的障碍物,其通常具有一个横向于垂直方向延伸的障碍面。室内空间在办公桌的上方、靠近办公桌边缘的位置存在污染物产生位点,即使用该办公桌的人的呼吸位点(人的口鼻部分),污染物产生位点由于污染物的惯性前行会在其前行方向进一步产生污染区域,该污染区域即为视作为目标区域40。根据本发明的污染物控制系统精确地控制目标空间30的气流流动,以使得目标区域40中散布的污染物以最安全的路径离开目标空间30。
[0057]
具体地,污染物控制系统包括出风装置10和回风装置20。
[0058]
出风装置10可以设置一个或多个,它被设置在目标空间30的顶部或上部。在图1所示的实施例中,两个出风装置10被隔开地设置在办公室的天花板的吊顶中。应当理解,在替代实施例中,出风装置10也可设置在办公室的墙体靠近天花板的位置。
[0059]
回风装置20可以是一个也可以是多个,它被设在目标空间的底部或下部,在图1所示的实施例中,一个回风装置20被设置在了办公室的地板中。当系统运行时,吊顶中的空间和地板中的空间形成了气流流动路径的一部分,气流从吊顶空间流入出风装置10,随后从出风装置10送出,此时送出气流作为洁净气流自上而下的穿过目标空间,带动目标区域中的部分空气使其从回风装置20抽离目标空间。在根据本发明的较佳实施例中,优选地,出风装置10包括风机组件,而回风装置20包括回风风机组件和过滤组件。回风装置20中的过滤组件可以包括pm2.5过滤网、颗粒物净化过滤网,以对离开目标空间的气流进行相应的处理。
[0060]
对于一些应用场合,被回风装置20抽离目标空间的气流可以直接排出到大气中,此时,回风装置20中可以不包括过滤组件,但对于另一些不适于直接排出的应用场合,系统可进一步包括空气净化装置60,此时,回风装置20中可以不包括过滤组件。空气净化装置60在气流路径中连接在回风装置20和出风装置10之间,能够对从回风装置20抽离的空气作进一步处理,再通过出风装置10送回到目标空间中。较佳地,如图1所示,空气净化装置60可以设置在目标空间30的外部,通过管路连接到出风装置10和回风装置20。或者,空气净化装置60也可以布置在目标空间30之内,通常靠近一侧墙体布置。空气净化装置60中可设置过滤组件和风机组件,其中的过滤组件用于对抽离的气流作进一步过滤处理,而风机组件则用于提供空气流动的驱动力,实现气流在出风装置10和回风装置20之间的循环。
[0061]
重要的是,在针对目标空间10进行污染物控制的污染物控制系统中,出风装置10
的出风气流在其行进路径上被控制成覆盖目标区域的至少一部分或全部。为了精确地控制污染物的流动方向,出风装置10的出风气流相对于水平面的角度α需要被精确控制。在图2至图5所示的较佳实施例中,出风装置10包括导风件和能够控制导风板运转角度的步进电机,通过对导风件相对于天花板的角度θ的控制来对出风气流的角度α进行控制。在通常情况下,在出风装置10的出风口的高度位置处出风气流相对于水平面的角度α等同于出风装置10的导风件与目标空间30的天花板或顶部之间的夹角角度θ。在较佳实施例中,如图2至图5所示,角度α基于目标区域40的远离污染物产生位点的第一边界点和靠近污染物产生位点的第二边界点在水平方向中相对于出风口的水平距离以及第一边界点和第二边界点在垂直方向中相对于出风口的垂直距离确定,使气流的行进路径上覆盖目标区域40的至少一部分或全部。也就是说,目标区域40受到大致直线行进路径上的气流的直接推动,气流的直接推动作用能够使得目标区域40中的污染物不会进一步向上和水平扩散,尤其是不会扩散远离第一边界点,而是绕过障碍物50的边缘被抽吸到回风装置20中。
[0062]
污染物控制系统进一步可包括控制装置,该控制装置基于目标区域40的第一边界点和目标区域40的第二边界点在水平方向中相对于出风口的水平距离以及目标区域40的第一边界点和目标区域40的第二边界点在垂直方向中相对于出风口的垂直距离对角度α进行控制,更具体地,控制装置对导风件相对目标空间30的顶部之间的夹角角度θ进行控制。
[0063]
以下,结合图2至图5,以图示左侧的目标区域40为例具体说明出风气流相对于水平面的角度α的设定。
[0064]
如图2至图5所示,污染物控制系统包括设置在目标空间30的顶部的四个分开布置的出风装置10以及位于障碍物50下方中央的一个回风装置20,为便于理解,在图示的实施例中,出风装置10、回风装置20以及障碍物关于回风装置20的中心线对称布置。以障碍物50左侧的人为例,其口鼻位置被认为是该目标空间30中的污染物产生位点,顺着呼吸气流的方向,污染物会形成污染物自然散布的一个目标区域40,其位于障碍物50的上方,并且靠近障碍物的左侧边缘。目标区域40具有障碍物50的远侧边缘方向的第一边界点和障碍物50的近侧边缘方向的第二边界点,其中第二边界点对应于污染物产生位点,较佳地设定在障碍物50的近侧边缘的外部。
[0065]
如图2所示,左侧的两个出风装置10中的一个布置在形成的污染物目标区域40的正上方,另外一个布置成相对目标区域40偏置在障碍物50的外侧,应当理解,偏置的方式也可以是一部分偏置到障碍物50的外侧。目标区域40的正上方的出风装置10,其出风气流相对于水平面的角度α被设定为90
°±5°
,可选地设定为90
°
。外侧的出风装置10的出风口具有在水平方向中远离目标区域40的外边缘和靠近目标区域的内边缘。在水平方向中,出风口的内边缘与目标区域的第二边界点之间的水平距离为l1,在垂直方向中,出风口的内边缘与第二边界点之间的垂直距离为h1,此时,临界角α1=arctan(h1/l1)。如图3所示,在与图2相同的出风装置10和回风装置20的布置方式中,在水平方向中,外侧的出风装置10的出风口的外边缘与目标区域的第一边界点之间的水平距离为l4,在垂直方向中,出风口的外边缘与第一边界点之间的垂直距离为h4,此时,界临角α4=arctan(h4/l4)。该出风装置10的角度α应控制为α4≤α≤α1,从而使得气流在气流的行进路径上覆盖目标区域的至少一部分。
[0066]
在另一较佳实施例中,如图4所示,在与图2相同的出风装置10和回风装置20的布
置方式中,左侧的出风装置10的出风口具有在水平方向中远离目标区域40的外边缘和靠近目标区域40的内边缘。在水平方向中,出风装置10的外边缘与目标区域40的第二边界点之间的水平距离为l3,在垂直方向中,出风装置10的外边缘与目标区域40的第二边界点之间的垂直距离为h3,此时,临界角α3=arctan(h3/l3)。同时,如图5所示,在水平方向中,出风装置10的内边缘与目标区域的第一边界点之间的水平距离为l2,在垂直方向中,出风装置10的内边缘与目标区域的第一边界点之间的垂直距离为l2,角度α2=arctan(h2/l2)。该左侧的出风装置10的角度α应控制在α2和α3之间。采用这一方式,能够使气流行进路径基本全部覆盖目标区域,以形成安全区域。
[0067]
在较佳实施例中,气流吹出角度α被控制在30
°
~95
°
之间。
[0068]
进一步地,在较佳实施例中,污染物控制系统包括多个出风装置10,每一个出风装置10各具有一个出风口,每个出风口对应于一个需被精确控制的目标区域。
[0069]
在替代实施例中,也可以在一个出风装置10中设置多个出风口,每一个出风口对应到一个需被精确控制的目标区域。例如,对于两面出风的出风装置,其具有四边形的形状,在相对的两侧设置有吸风口,每个出风口根据设定的出风角度α朝向两个相反的方向出风,从而控制污染物。又例如,对于四周出风的出风装置,其具有四边形的形状,在四个侧边处都设置有出风口,四个出风口根据设定的出风角度α朝向四个方向出风,从而控制污染物。在利用空调室内机作为出风装置的情况下,四周出风的出风装置就是四周出风的空调室内机,两面出风的出风装置就是两面出风的空调室内机。
[0070]
如图2-图5所示,污染物控制系统的目标空间中存在阻挡气流流动的障碍物50,并且该障碍物50直接覆盖在回风装置20的上方,尤其是覆盖了回风装置20的整个进风口,在本系统中,对于角度α的精确控制能够使左侧目标区域中的污染物不会沿障碍物的延伸平面向障碍物40的远侧边缘行进,而且是限制在障碍物50的中部靠近左侧边缘的区域,并且使大部分污染物绕过近侧边缘向下流动进入障碍物50下方的回风装置20。
[0071]
优选地,障碍物50与目标区域40之间的垂直高度距离设定在0-0.6m。目标区域40的水平方向的宽度距离设定在0.1m-0.7m之间,目标区域40的第二边界点靠近或对齐障碍物50的边缘,优先地,目标区域40的第二边界点与障碍物50的近侧边缘之间的水平距离在
±
0.3m之内(此处,以障碍物50的近侧边缘设定为坐标0m点)。
[0072]
根据实验,在人正常呼吸的情况下,产生的目标区域的第一边界点与污染物产生位点之间的水平距离为0.1m-0.7m,换言之,目标区域的第一边界点和第二边界点之间的水平距离在0.1m-0.7m的范围中。
[0073]
在根据本发明的一个具体实施方式的污染物控制系统中,优先地,应将出风装置10的送出气流的流速控制在较低的水平,以避免扰动目标区域40中的污染物引起含污染物气流形成涡流、回流造成污染物扩散。在一些可选的实施例中,出风装置10的送出气流的出风风速不大于0.6m/s(此处,出风风速是指出风装置出风口处的风速)。与此同时,应确保回风装置20的回风风速比出风风速大(此处,回风风速是指回风装置回风口处的风速),从而使得回风装置20产生充足的抽吸作用,能够与出风形成“接力”,使得污染物的向上扩散趋势被抑制,含污染物的气流大致向下流动至回风装置20中。在一些可选的实施例中,回风风速不小于3m/s。此外,也应确保回风装置的回风风量,以使目标区域40中的含污染物的气流及时流出目标空间。在一些可选的实施例中,回风装置20的回风风量被设定为至少600m3/
h。可选地,回风装置20可以构造成回风风量、回风风速可选择地设定,从而在对应不同污染物浓度(即不同使用人数)时,能够使用能耗最优的回风风量和回风风速。
[0074]
根据本发明的另一实施例,可以参照出风口与障碍物的边缘和/或污染物产生位点的位置确定出风装置10的出风口的出风气流的相对于水平面的夹角角度α,使得气流在行进路径上覆盖目标区域的至少一部分或全部。在实际装置中,一般是通过设置在出风口中的导风件与水平面的夹角角度θ,来控制出风气流与水平面的夹角角度α,上述两个夹角角度是相同的。
[0075]
可以如下通过障碍物的边缘以及污染物发生位点确定夹角角度θ:
[0076]
针对有障碍物50的目标空间,污染物控制系统包括设置在目标空间30的顶部或上部的出风装置10、设置在目标空间30的底部和下部的回风装置20和污染物产生位点。污染物产生位点的高度位置高于障碍物50的高度位置,污染物从污染物产生位点起到障碍物50的上方散布。出风装置10的出风口安装有多个导风件,用于引导送出气流的方向,每个导风件与目标空间30的顶部的夹角角度θ根据出风口相对障碍物的边缘和污染物产生位点的位置确定。
[0077]
较佳地,导风件与目标空间的顶部的夹角角度θ根据障碍物的近侧边缘(即,靠近污染物产生位点的一侧的边缘)确定。在水平方向中,出风口的内边缘与障碍物边缘之间的水平距离为l5,在垂直方向中,出风口的内边缘与障碍物之间的垂直距离为h5,角度α5=arctan(h5/l5),在水平方向中,出风口的外边缘与污染物的远侧边界点之间的水平距离为l6,在垂直方向中,出风口的外边缘与障碍物之间的垂直距离为l6,角度α6=arctan(h6/l6),角度θ被控制为:α6≤α≤α5。
[0078]
或者,在水平方向中,出风口的外边缘与障碍物边缘之间的水平距离为l7,在垂直方向中,出风口的外边缘与障碍物之间的垂直距离为h7,角度α7=arctan(h7/l7),在水平方向中,出风口的内边缘与污染物的远侧边界点之间的水平距离为l8,在垂直方向中,出风口的内边缘与障碍物之间的垂直距离为l8,角度α8=arctan(h8/l8),理想地,应将角度α被控制在α7和α8之间。这样,气流行径路径能够基本覆盖污染物产生位点和污染物的远侧边界点之间的全部范围。
[0079]
可以如下参照障碍物的近侧边缘确定出风装置的导风件相对于目标空间顶部的夹角角度θ:
[0080]
第一,根据出风口的中央位置相对于障碍物的近侧边缘的位置确定,其中在水平方向中出风口的中央位置相对于障碍物的近侧边缘的水平距离为l11,在垂直方向中,出风口的中央位置相对于障碍物的近侧边缘的垂直距离为h11,导风件中的至少一个的角度θ确定为α11
±
10
°
范围内,其中α11=arctan(h1/l11)。
[0081]
第二,根据出风口的外边缘相对于障碍物的近侧边缘的位置确定,其中在水平方向中,出风口的外边缘相对于障碍物的近侧边缘的水平距离为l12,在垂直方向中出风口外边缘相对于障碍物的近侧边缘的垂直距离为h12,导风件中的至少一个的角度θ确定为α12
±
10
°
范围内,其中α12=arctan(h12/l12)。
[0082]
第三,根据出风口相对于障碍物的近侧边缘以及从近侧边缘起的预设距离d确定。具体地,出风口具有在水平方向中远离障碍物的外边缘和靠近障碍物的内边缘,同时从障碍物的近侧边缘设定预设距离d,该预设距离为0.1-1m,可选地,为0.7m、0.5m、0.3m,具体可
以根据使用环境以及控制要求来设定。在水平方向中,内边缘与近侧边缘之间的距离为la,在垂直方向中,内边缘与近侧边缘之间的垂直距离为ha,角度β1=arctan(ha/la),在水平方向中,外边缘与近侧边缘之间的水平距离为lb,在垂直方向中,外边缘与近侧边缘之间的垂直距离为hb,角度β2=arctan[hb/(lb+d)],角度θ被控制为:β2≤θ≤β1。
[0083]
出风口具有在水平方向中远离障碍物的外边缘和靠近障碍物的内边缘,从近侧边缘设定预设距离d,在水平方向中,外边缘与近侧边缘之间的水平距离为lb,在垂直方向中,外边缘与近侧边缘之间的垂直距离为hb,角度β3=arctan(hb/lb),在水平方向中,内边缘与近侧边缘之间的水平距离为la,在垂直方向中,内边缘与近侧边缘之间的垂直距离为ha,角度β4=arctan[ha/(la+d)],角度θ被控制为在β3和β4之间。
[0084]
出风口中设置有至少一个导风件,一个出风口中的导风件的设置角度一致。参照出风口与障碍物的边缘的相对位置,对出风口的导风件角度α进行设定。具体地,在水平方向中,导风件中的至少一个相对于障碍物近侧边缘之间的水平距离为l9,在垂直方向中该至少一个导风件相对于障碍物近侧边缘之间的垂直距离为h9,该导风件的角度θ确定为α9=arctan(h9/l9)。较佳地,出风口中的多个导风件中的每一个的角度均如此设定。
[0085]
应当理解,在一些实施例中,一个出风口中设置两个及两个以上的导风件,其中一部分导风件的角度和另一部分导风件的角度可以不同,从而通过一个出风口中不同部分(例如出风口左半部分、右半部分)的导风件设置角度不同来对应两个目标区域或两个障碍物或两个污染物发生位点。
[0086]
在替代实施例中,可以参照出风口与污染物产生位点的相对位置,对出风口的多个导风件中的至少一个的角度θ进行设定。具体地,在水平方向中,导风件中的至少一个相对于污染物产生位点之间的水平距离为l10,在垂直方向中导风件中的每一个相对于污染物产生位点之间的垂直距离为h10,该导风件的角度θ确定为α10=arctan(h10/l10)。较佳地,出风口中的多个导风件中的每一个的角度均如此设定。
[0087]
进一步地,可以在污染物控制系统中设置人检知传感器,用于检测目标空间内的人的位置。人检知传感器能够将检测到的人的位置传送到系统的控制装置中,从而确定污染物产生位点的位置,以便于对出风装置的导风件的角度θ或者出风装置的出风气流相对于水平面的夹角角度α进行控制。传感器可以设置在出风装置上,也可以设置在对象空间内,例如:天花板、侧墙、办公桌等;可以是单个传感器,也可以是多个传感器。使用多个传感器检测一个人的位置变化,能够提高检测的精确度。
[0088]
在一些实施例中,出风装置的出风口的宽度,例如为图2的出风装置的内边缘和外边缘之间的距离理想地不小于0.2m,以避免气流过窄,引导污染物的效果变差。
[0089]
此外,出风装置中的导风板通过步进电机能够针对目标空间内的多个不同位置的目标区域进行角度调节,角度位置可以是在控制装置中预先设定的,也可以根据诸如人检知传感器提供的信号进行实时控制。其中,多个目标区域比如是在水平方向上距离出风装置不同远近为位置上。
[0090]
上述污染物控制系统能够有利地用于诸如办公室之类需要进行空气处理的空间的布置,其中障碍物比如为办公桌。
[0091]
经过实验证明,根据本发明的污染物控制系统能够精确地控制污染物的流动,尤其当用在办公室中时,每一个办公工位周围都能形成一个安全区域,每位工作人员各自呼
出的气流不会交叉。
[0092]
在实验中,以co2表示污染物,co2的去除效果能间接体现对其他污染物的去除效果。经过实际测定,无人的房间中的co2初始浓度(即外部空气中的co2浓度)约为400ppm,在一个约100m3的房间中,四个人每30分钟呼出气体会增加约350ppm的co2,并且,co2和人数、时间呈正比关系,和房间体积呈反比。
[0093]
需要说明的是,为了更为直观的看到本发明所提供的技术方案的效果,后续部分采用cfd的模拟结果,为使结果视觉效果显著,该模拟结果经过一定的灰度处理,灰度值较高的部分代表污染物浓度相对较高。图中用线框标识了污染物产生位点(即人的口鼻处)。
[0094]
示例一:
[0095]
图6示出了目标空间的布局:目标空间中存在桌子,即障碍物,桌子两侧分别设置两个椅子,一共四个椅子。桌子中央对应的地面上设置有一个回风装置20,天花板上设置有四个出风装置10,一个出风装置10对应一个椅子且设置在椅子后方的天花板上。
[0096]
在cfd模拟的模型中,目标空间的高度为3m,坐在椅子上的人的坐高大约为1.3m,出风装置的外边缘与人的口鼻处(即污染物产生位点)的水平距离l大约为0.95m,出风装置的外边缘与坐在椅子上的人的头的垂直距离h大约为1.7m。为了保证出风装置送出的吹出气流基本对应人口鼻处呼出的污染物,根据l和h,出风装置的送出气流方向与天花板的夹角α=arctan(h/l)=arctan(1.7/0.95)=60.8
°
,因此,设置出风装置的导风板关于天花板的夹角α为60
°
。
[0097]
送出气流流速为0.23m/s、出风口的长度和宽度为0.65m*0.5m,吸入风速为4m/s,回风口的长度和宽为0.6m*0.048m,在此条件下模拟运行30min后,结果如图7(co2量程400-1000ppm)所示,在人的呼吸高度的截面上(距离地面1.2m),每个人周围会产生一环形安全区域,即污染物只在距离人非常小的范围内显示出较高的浓度,呼出的气体不会交叉,不会回流再被人吸入。
[0098]
示例二
[0099]
示例二目标空间的整体布局与示例一的布局类似,不同之处在于,同侧两个椅子之间间隔为0m,出风装置10也适应性移位,与人对应。模拟运行30min后的结果如图8所示,虽然两个人的坐位之间的间隔为0m,但是两人之间仍然不会出现呼出气流的交叉。
[0100]
示例三
[0101]
示例三的整体布局与示例一的布局类似,不同之处在于,出风装置10的位置变化,出风装置的外边缘在垂直方向中大致对应人口鼻位置。为了保证出风装置送出的吹出气流基本对应人口鼻处呼出的污染物,出风装置的导风板与天花板的夹角α为90
°
。
[0102]
模拟运行30min后,结果如9所示,在人的呼吸高度的截面上(距离地面1.2m),每个人周围会产生一环形安全区域,呼出的气体不会交叉,不会回流再被人吸入。
[0103]
对比例
[0104]
作为对比例,如图10a、图11a和图12a所示,分别采用空气净化器、面板四周出风、面板中央回风的空调室内机(例如:四面出风嵌入式空调室内机)、出风口和回风口分开以及上送上回的空气处理设备(例如:ahu空调箱))对目标空间进行空气处理,以去除目标空间内的二氧化碳。空气净化器采用图10a中所示的位置布置,空调室内机采用如图11a所示的方式布置,空气处理设备采用如图12a所示的方式布置。使空气净化器、空调室内机、空气
处理设备的回风风量相当,分别约为800m3/h、1000m3/h、1000m3/h。
[0105]
模拟运行30分钟后的结果如图10b、图11b和图12b所示,人呼吸高度截面,三种情况下的co2浓度均超过500ppm,并且都存在不同人之间的呼出气体的交叉。另外,布置空气净化器的让整个房间都搅动,容易形成交叉感染。当污染物是细菌或病毒时,这样的污染物增长率相对会增加交叉感染的可能性。
[0106]
表1示出了根据本发明的污染物控制系统(回风风量约为800m3/h的场合)、各对比例经过cfd模拟后的数值结果,其中的数值表示了经过一段时间运行后,室内co2浓度的数值。从表1中可以看到,根据本发明的污染物控制系统经过20分钟的运行,室内co2浓度的约为460ppm,之后基本稳定在460ppm附近。而使用空气净化器、空调室内机和空气处理设备之后,经过60分钟的运行,室内co2浓度都明显高于采用本发明的污染控制系统的co2浓度。尤其是当使用的ahu1000后,随着时间的不断增长,co2的浓度还会一直增加。
[0107]
表1
[0108]
时间(min)本发明空气净化器空调室内机空气处理设备040040040040054304904804601045055052049015455580540520204605905505503046061055058060460610550580+
[0109]
采用根据本发明的污染物控制系统和方法,能够在目标空间中为每一个人产生一个相对独立的安全区域,每个人呼出的气流不会交叉,邻座的人即使相邻的很近,也不会有呼出气流的交叉,空间内污染物捕集率至少可以达到90%。
[0110]
本发明虽然以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以做出可能的变动和修改。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化及修饰,均落入本发明权利要求所界定的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1