一种无人驾驶矿卡路线自动识别系统的制作方法
1.本技术涉及无人驾驶监控的技术领域,尤其是涉及一种无人驾驶矿卡路线自动识别系统。
背景技术:
2.近年来,随着我国智能化和信息化技术的发展,以及对绿色矿山和智慧矿山战略计划的推进,在面对矿区物料转运的问题时,目前已经开始采用无人驾驶矿卡进行转运,通过采用无人驾驶技术有效提高了生产的安全性,同时降低了生产成本,提高了生产效率。
3.在转运过程中,无人驾驶的矿卡需要依靠自动识别系统识别运输路线,矿卡上安装有摄像头等,通过摄像头监控周围的情况进而识别运输路线,但由于矿区道路条件限制,矿卡在转运过程中的环境较为恶劣,摄像头在长时间使用时易沾满灰尘,为了不影响摄像头的使用,需要对摄像头进行清洗,但频繁的清洗会影响监控设备的正常使用。
技术实现要素:
4.为了减少清洗对监控设备的使用造成影响,本技术提供一种无人驾驶矿卡路线自动识别系统。
5.本技术提供的一种无人驾驶矿卡路线自动识别系统采用如下的技术方案:
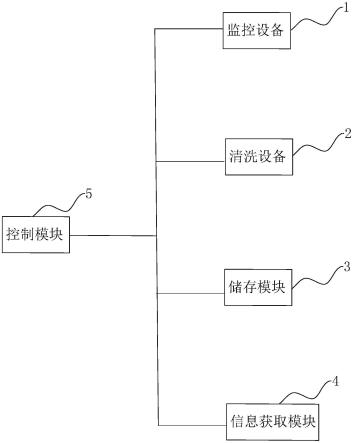
6.一种无人驾驶矿卡路线自动识别系统,包括:
7.监控设备;
8.清洗设备,用于对所述监控设备进行清洗;
9.储存模块,用于储存所述监控设备的预设清洗等级;
10.信息获取模块,用于获取矿卡行驶过程中的粉尘等级;
11.控制模块,用于当所述粉尘等级达到所述预设清洗等级时,控制所述清洗设备对所述监控设备进行清洗;
12.所述信息采集模块和所述储存模块均与所述控制模块连接。
13.通过采用上述技术方案,获取矿卡行驶过程中的粉尘等级,当粉尘等级达到预设清洗等级时,说明粉尘即将会影响监控设备的正常使用,控制模块控制清洗设备对监控设备进行清洗。通过设置预设清洗等级,当粉尘等级达到预设清洗等级时再进行清洗,而不是监控设备沾染到粉尘就进行清洗,使得在对监控设备清洗时,不会对监控设备的正常使用产生较大的影响。
14.优选的,所述清洗设备包括刮板,所述刮板靠近所述监控设备的一侧设有刮条;所述清洗设备还包括水幕喷头和吹气喷头,所述水幕喷头和所述吹气喷头均设在所述刮板内部。
15.通过采用上述技术方案,水幕喷头对监控设备进行喷水,进而将粉尘打湿,通过刮板和刮条的配合将打湿的粉尘进行清理,进而完成监控设备的清洗;吹气喷头将清理后监控设备上残留的水雾进行吹干,能够有效减少由于监控设备上残留水雾,使得粉尘更容易
依附在监控设备上,进而对监控设备进行二次污染。
16.优选的,所述刮板的上方包括第一开口,所述刮板内部中设有与所述第一开口连接的第一空腔,所述第一空腔中包括竖直固定在内壁上的第一滑轨,所述吹气喷头与所述第一滑轨滑移连接。
17.通过采用上述技术方案,吹气喷头设置在第一空腔内,且能沿着第一滑轨移动,当需要喷气时,吹气喷头沿着滑轨滑出第一空腔对监控设备进行喷气,以使得将清洗完的监控设备进行干燥。
18.优选的,所述刮板的下方包括第二开口,所述刮板内部中设有与所述第二开口连接的第二空腔,第二空腔中包括竖直固定在内壁上的第二滑轨,所述水幕喷头与所述第二滑轨滑移连接。
19.通过采用上述技术方案,水幕喷头设置在第二空腔内,且能沿着第二滑轨移动,当需要喷水清洗时,水幕喷头沿着滑轨滑出第二空腔对监控设备进行喷水,以使得对监控设备上的粉尘进行打湿。
20.优选的,所述吹气喷头和所述水幕喷头均与所述控制模块电性连接。
21.通过采用上述技术方案,控制模块能够控制吹气喷头在第一滑轨上滑动,使得吹气喷头沿着第一滑轨进行升降;控制模块能够控制水幕喷头在第二滑轨上的滑动,使得水幕喷头沿着第二滑轨进行升降。
22.优选的,所述刮条与所述刮板为可拆卸连接。
23.通过采用上述技术方案,刮条与刮板可拆卸连接,当刮条由于时间长的使用发生氧化时,便于对刮条进行拆卸更换。
24.优选的,所述清洗设备还包括防护罩,固定设在所述监控设备的前端,所述防护罩与所述刮板相接的一侧设有滑移槽,所述刮板能在所述滑移槽上移动。
25.通过采用上述技术方案,清洗设备包括防护罩,防护罩上设有滑移槽,刮板能够在滑移槽上进行移动,进而通过刮板的移动对监控设备进行清理。
26.优选的,所述防护罩的内部包括第一挡板和第二挡板,所述第一挡板的底部固定有驱动机构,所述驱动机构上固定有转动杆,所述转动杆与所述第一挡板平行,所述刮板与所述转动杆螺纹连接;
27.所述第二挡板的底部固定有垫块,所述垫块上固定有移动杆,所述刮板与所述移动杆滑动连接;
28.所述驱动机构能驱动所述转动杆转动,使得所述刮板能在所述转动杆和所述移动杆上进行升降。
29.通过采用上述技术方案,防护罩的内部包括第一挡板和第二挡板,第一挡板上的驱动机构和转动轴带动刮板进行移动,第二挡板上的垫块和移动杆使得刮板能够保持与监控设备完全接触,刮板通过在转动轴和移动杆进行升降,进而实现对监控设备的清理。
30.优选的,所述防护罩还包括第三挡板和第四挡板,所述第三挡板和第四挡板上均固定设有气缸,所述气缸使得所述第一挡板和所述第二挡板在所述防护罩内移动,进而使得所述刮板移动。
31.通过采用上述技术方案,防护罩中的第三挡板和第四挡板上均安装有气缸,使得刮板能够向远离监控设备的方向进行移动,当刮板完成对监控设备的清洗时,刮板能够先
向远离监控设备的方向移动,然后再向上滑动,进而减少刮板与监控设备的二次接触,减少粉尘再次污染监控设备。
32.优选的,所述气缸和所述驱动机构均与所述控制模块电性连接。
33.通过采用上述技术方案,控制模块能够控制驱动机构转动,使得刮板进行升降;控制模块控制气缸使得刮板沿着远离监控设备的方向移动,以使得刮板清理监控设备时更加方便。
34.综上所述,本技术包括以下至少一种有益技术效果:
35.1.获取矿卡行驶过程中的粉尘等级,当粉尘等级达到预设清洗等级时,说明粉尘即将会影响监控设备的正常使用,控制模块控制清洗设备对监控设备进行清洗。通过设置预设清洗等级,当粉尘等级达到预设清洗等级时再进行清洗,而不是监控设备沾染到粉尘就进行清洗,使得在对监控设备清洗时,不会对监控设备的正常使用产生较大的影响;
36.2.水幕喷头对监控设备进行喷水,进而将粉尘打湿,通过刮板和刮条的配合将打湿的粉尘进行清理,进而完成监控设备的清洗;吹气喷头将清理后监控设备上残留的水雾进行吹干,能够有效减少由于监控设备上残留水雾,使得粉尘更容易依附在监控设备上,进而对监控设备进行二次污染。
附图说明
37.图1是本技术实施例一种无人驾驶矿卡路线自动识别系统的流程示意图。
38.图2是本技术实施例清洗设备和监控设备的结构示意图。
39.图3是本技术实施例清洗设备的结构示意图。
40.图4是本技术实施例防护罩的内部结构示意图
41.附图标记说明:1、监控设备;2、清洗设备;21、刮板;22、刮条;23、水幕喷头;231、第二开口;232、第二空腔;233、第二滑轨;24、吹气喷头;241、第一开口;242、第一空腔;243、第一滑轨;25、防护罩;251、第一挡板;252、第二挡板;253、驱动机构;254、转动杆;255、垫块;256、移动杆;257、第三挡板;258、第四挡板;259、气缸;26、滑移槽;3、储存模块;4、信息获取模块;5、控制模块。
具体实施方式
42.以下结合附图1-3对本技术作进一步详细说明。
43.本技术实施例公开一种无人驾驶矿卡路线自动识别系统。参照图1和图2,一种无人驾驶矿卡路线自动识别系统包括监控设备1,其中,监控设备1可以是摄像头,安装在矿卡的车头上,用于监控矿卡行驶过程中的路况,但矿卡在行驶过程中粉尘较多会影响到监控设备1的正常使用,因此安装清洗设备2对监控设备1进行清洗。当信息获取模块4获取的粉尘等级达到监控设备1的预设清洗等级时,控制模块控制清洗设备2对监控模块进行清洗,其中,预设清洗等级储存在储存模块3中,储存模块3可以是数据库或者是可移动介质等。信息获取模块4可以是粉尘传感器,通过粉尘传感器采集的数据进而得知粉尘等级。控制模块可以是电子设备,包括电脑或者手机等,电子设备能够接收信息获取模块4获取的粉尘等级,且接收粉尘等级后与预设等级进行比对,当二者一致时,触发清洗的程序,进而使得清洗设备2对监控设备1进行清洗。
44.参照图2和图3,清洗设备2包括刮板21,且刮板21靠近监控设备1的一侧设有刮条22,刮条22与监控设备1需要清洗的位置能够直接接触,其中,刮板21可以是橡胶材质,以使得在刮去水渍时更加的干净,且不会留下印记。刮板21与刮条22为可拆卸连接,当刮条22因长时间使用导致橡胶老化时,能够对刮条22进行拆卸更换;刮条22与刮板21之间也可以为粘接,粘接能够减少刮条22从刮板21上脱落。清洗设备2还包括水幕喷头23和吹气喷头24,水幕喷头23能够将监控设备1上的粉尘打湿,进而便于刮条22进行清理;清洗设备2还包括吹气喷头24,吹气喷头24能够将刮条22清洗过的监控设备1上残留的水雾进行吹干,以避免粉尘由于水雾的存在更加容易依附在监控设备1上,其中,吹气喷头24喷出的气体为冷空气,以减少由于喷的空气温度较高,在寒冷的环境下监控设备1更易生成水雾的情况发生。水幕喷头23和吹气喷头24均设在刮板21内部,能够随着刮板21的移动而移动,水幕喷头23与吹气喷头24的位置相对应,且刮条22设置在两个喷头中间的位置,以达到在清理过程中实现喷水、刮水和吹气的清理流程。
45.参照图2和图3,刮板21的上方包括第一开口241,刮板21的内部设有与第一开口241连接的第一空腔242,第一空腔242的内壁上竖直固定有第一滑轨243,吹气喷头24能在滑轨上进行升降,吹气喷头24内置于第一空腔242内,当需要吹气时,吹气喷头24沿着滑轨从第一空腔242内滑出,进而能够对监控设备1进行吹气。刮板21的下方包括第二开口231,刮板21的内部设有与第二开口231连接的第二空腔232,第二空腔232的内壁上竖直固定有第二滑轨233,水幕喷头23能在滑轨上进行升降,水幕喷头23内置于第二空腔232内,当需要喷水时,水幕喷头23沿着滑轨从第二空腔232内滑出,进而能够对监控设备1进行喷水。水幕喷头23和吹气喷头24均与控制模块电性连接,当需要对监控设备1进行清理时,控制模块控制水幕喷头23和吹气喷头24均伸出来配合刮板21对监控设备1进行清洗。
46.参照图2和图4,清洗设备2还包括防护罩25,防护罩25固定在监控设备1的前端,且与监控设备1需要清洗的部位处于同一水平面上,防护罩25与刮板21相接的一侧设有滑移槽26,刮板21能在滑移槽26上移动,进而实现对监控设备1的清洗。
47.防护罩25的内部包括第一挡板251和第二挡板252,第一挡板251的底部固定有驱动机构253,驱动机构253可以是电机和减速机,驱动机构253上固定有转动杆254,转动杆254可以是丝杆,驱动机构253能够带动转动杆254转动,转动杆254与第一挡板251平行设置,其中,刮板21与转动杆254螺纹连接,以使得转动杆254在转动的时候能够带动刮板21上下移动。第二挡板252的底部固定有垫块255,垫块255上固定有移动杆256,刮板21与移动杆256滑动连接,通过移动杆256的设置可以使得刮板21与监控设备1进行充分接触,不会发生倾斜。
48.参照图2和图4,防护罩25还包括第三挡板257和第四挡板258,第三挡板257和第四挡板258上均固定有气缸259,气缸259能够使得第一挡板251和第二挡板252在防护罩25内进行移动,进而使得刮板21能够向远离监控设备1的方向移动,第三挡板257和第四挡板258与防护罩25固定连接,且与监控设备1固定连接。当刮板21完成对监控设备1的清洗时,刮板21需要进行归位,若刮板21再向上刮回去,可能会使得刚被清理的粉尘又回到监控设备1上,因此需要气缸259推动刮板21与监控设备1分离,然后再向上滑动,滑动到顶部时,气缸259再将刮板21拉至原位,进而等待下一次清洗。防护罩25的底部为镂空状态,不进行封闭,以使得刮板21刮下来的水渍和灰尘能够随着防护罩25底部的缺口处排出,进而不会堵塞滑
移槽26。气缸259和驱动机构253均与控制模块电性连接,控制模块能够控制驱动机构253的开启,且能够控制气缸259的推拉,进而实现清洗设备2对监控设备1的清洗。
49.本技术实施例一种无人驾驶矿卡路线自动识别系统的实施原理为:当控制模块确定粉尘等级达到预设等级时,控制模块控制驱动机构253开始转动,并控制水幕喷头23和吹气喷头24沿着滑轨滑出开始喷水和喷气,与此同时刮板21和刮条22随着驱动机构253的运作沿着滑移槽26向下移动,将水幕喷头23喷出的水刮干净,吹气喷头24将残留的水雾吹干,当刮板21和刮条22移动到滑移槽26的底部时,控制模块确定清洗设备2完成一次清洗,控制模块控制水幕喷头23沿着滑轨滑动回第二空腔232内,且吹气喷头24滑动回第一空腔242内,控制模块控制气缸259推动刮板21向远离监控设备1的方向移动,并控制驱动机构253反方向转动,当刮板21和刮条22滑动到滑移槽26的顶部时,控制模块控制气缸259拉动刮板21和刮条22向靠近监控设备1的方向移动进行归位,以完成本次对监控设备1的清洗。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1