一种高效率喷涂机器人的制作方法
1.本实用新型涉及喷涂设备技术领域,尤其涉及一种高效率喷涂机器人。
背景技术:
2.喷涂机器人也是工业机器人的一种,是由三大部分、六个子系统组成。三大部分是:机械本体、传感器部分和控制部分。六个子系统是:驱动系统、机械结构系统、感知系统、机器人
‑
环境交互系统、人机交互系统以及控制系统。应用喷涂机器人有助于实现全自动化,不仅使工人远离有毒、有害物质,而且涂层均匀,质量有保证。但是对一些多面结构的产品进行喷涂时,现有的喷涂机器人需要多次操作,每次只能对一个面进行喷涂。
技术实现要素:
3.基于上述背景技术存在的技术问题,本实用新型提出一种高效率喷涂机器人。
4.本实用新型提出了一种高效率喷涂机器人,包括:机身、安装在机身上的机械臂和与机械臂连接的末端执行器,其中:
5.末端执行器包括用于与机械臂连接的连接件、位于连接件一侧的安装座和安装在安装座上的喷嘴;
6.安装座包括第一安装座和第二安装座,第一安装座与连接件固定连接,第二安装座位于第一安装座的下方并与第一安装座枢接,且第二安装座靠近连接件的一侧设有与第一连接件固定的延伸架;延伸架上安装有第一气缸,所述第一气缸中活塞杆的顶出端与第二安装座连接;
7.喷嘴包括第一喷嘴和第二喷嘴,第一喷嘴固定安装在第一安装座上,且第一喷嘴的喷口朝向远离第一安装座的一侧;第二喷嘴固定安装第二安装座上,且第二喷嘴的喷口朝向远离第二安装座的一侧。
8.优选地,第二安装座上设有用于驱动第二喷嘴沿其喷射方向直线移动的驱动机构。
9.优选地,第二安装座上设有可供第二喷嘴穿过的通孔;驱动机构包括第二气缸,所述第二气缸中活塞杆的顶出端穿过通孔与第二气缸连接。
10.优选地,连接件为法兰。
11.本实用新型中,通过对安装座的结构进行设置,以使安装座中的第一安装座与第二安装座之间夹角角度可以自动调整;同时,将喷嘴中的第一喷嘴安装在第一安装座上,将喷嘴中的第二喷嘴安装在第二安装座上,以使该末端执行器可同时对工件的不同面进行喷涂作业,从而可有效提高工作效率。
附图说明
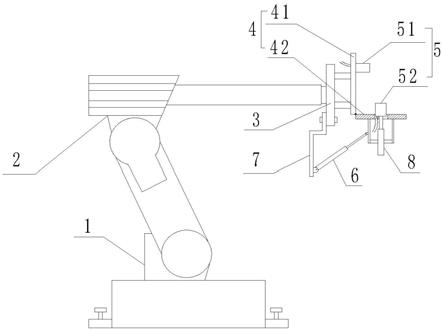
12.图1为本实用新型提出的一种高效率喷涂机器人的结构示意图。
具体实施方式
13.下面,通过具体实施例对本实用新型的技术方案进行详细说明。
14.如图1所示,图1为本实用新型提出的一种高效率喷涂机器人的结构示意图。
15.参照图1,本实用新型实施例提出的一种高效率喷涂机器人,包括:机身1、安装在机身1上的机械臂2和与机械臂2连接的末端执行器,其中:末端执行器包括用于与机械臂2连接的连接件3、位于连接件3一侧的安装座4和安装在安装座4上的喷嘴5。
16.安装座4包括第一安装座41和第二安装座42,第一安装座41与连接件3固定连接,第二安装座42位于第一安装座41的下方并与第一安装座41枢接,且第二安装座42靠近连接件3的一侧设有与第一连接件3固定的延伸架7;延伸架7上安装有第一气缸6,所述第一气缸6中活塞杆的顶出端与第二安装座42连接,以利用第一气缸6的伸缩使调整第二安装座42的角度。喷嘴5包括第一喷嘴51和第二喷嘴52,第一喷嘴51固定安装在第一安装座41上,且第一喷嘴51的喷口朝向远离第一安装座41的一侧;第二喷嘴52固定安装第二安装座42上,以使第二喷嘴52随着第二安装座42的移动而移动,且第二喷嘴52的喷口朝向远离第二安装座42的一侧。
17.由上可知,本实用新型通过对安装座4的结构进行设置,以使安装座4中的第一安装座41与第二安装座42之间夹角角度可以自动调整;同时,将喷嘴5中的第一喷嘴51安装在第一安装座41上,将喷嘴5中的第二喷嘴52安装在第二安装座42上,以使该末端执行器可同时对工件的不同面进行喷涂作业,从而可有效提高工作效率。
18.此外,本实施例中,第二安装座42上设有用于驱动第二喷嘴52沿其喷射方向直线移动的驱动机构8。以根据第二安装座42角度的变化调整第二喷嘴52与喷涂面的距离,从而保障喷涂效果。
19.本实施例中,第二安装座42上设有可供第二喷嘴52穿过的通孔;驱动机构8包括第二气缸,所述第二气缸中活塞杆的顶出端穿过通孔与第二气缸连接。以保障喷嘴52有足够的移动量。
20.本实施例中,连接件3为法兰。
21.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1