用于饲料加工的制粒设备的制作方法
1.本发明涉及饲料加工技术领域,具体涉及一种用于饲料加工的制粒设备。
背景技术:
2.在饲料加工的过程中,需要将混合好的原料进入调制器调质,调质合格后进入饲料制粒机进行制粒,目前,市面上的饲料制粒机主要环模饲料制粒机、平模饲料制粒机、对辊饲料制粒机等类别,其中环模饲料制粒机的工作原理为:动力驱动环模转动,原料进入到压辊外的环模内腔中,环模转动时,带动压辊转动,原料被挤压穿过环模上的模孔,从而被压制成圆柱状的颗粒。
3.在生产做过程,控制供料的速度是确保环模饲料制粒机稳定生产的关键因素,若供料的速度太快,原料从环模模孔挤出的速度跟不上供料的速度,导致供料区的原料厚度超出能带动压辊转动的极限厚度,压辊被卡,变滚动为滑动,发生剧烈摩擦,造成发热甚至烧焦。
技术实现要素:
4.针对现有技术中的缺陷,本发明提供了一种用于饲料加工的制粒设备,以避免供料速度过快导致压辊被卡,发生剧烈摩擦,造成发热甚至烧焦的情况发生。
5.本发明提供了一种用于饲料加工的制粒设备,包括制粒机构、输送机和控制器;
6.所述制粒机构包括机架、转子、驱动机构和定子;
7.所述转子转动安装于所述机架,转子内设置有前后贯穿的轴孔,转子的前端固定安装有环模,所述环模的周壁上分布有模孔,环模的前端设置有喂料罩,所述喂料罩上设有进料口;
8.所述驱动机构用于驱动所述转子转动;
9.所述定子的后部从所述转子的轴孔穿过并固定于所述机架,定子的前部穿入所述环模,且定子的前部周向环设有若干组压辊组件,每组所述压辊组件均包括前后相对设置的前支架和后支架、以及设于所述前支架和后支架之间的压辊,所述前支架和后支架均包括固定于所述定子外并沿径向延伸的导向杆、滑动套设于所述导向杆上的滑块、固定于所述导向杆上并支撑于所述滑块外的限位件、以及套在所述导向杆上并支撑于所述滑块和定子之间的第一压缩弹簧,所述压辊转动安装于所述前支架和后支架的滑块之间,所述定子上位于所述后支架的滑块的径向内侧设置有接触感应器,所述滑块上具有能够与所述接触感应器接触的抵接部;
10.输送机用于向所述进料口内输送原料;
11.所述控制器的输入端与所述接触感应器电连接,控制器的输出端与所述输送机电连接。
12.进一步地,所述机架具有前壳和后壳,所述前壳上设置有安装孔,所述后壳上设置有安装槽,所述转子的中部通过第一轴承固定于安装孔内,转子后端的端部通过第二轴承
固定于所述安装槽内;
13.所述定子的后端固定于所述后壳,定子的中部通过第三轴承固定于所述转子的轴孔的前端。
14.进一步地,所述驱动机构包括电机,所述电机和机架固定在一底座上,所述前壳和后壳之间设有传动机构,所述电机通过所述传动机构与所述转子相连。
15.进一步地,所述传动机构包括相啮合的主动轮和从动轮,所述主动轮同轴安装于所述电机的输出轴上,所述从动轮同轴安装于所述转子上。
16.进一步地,所述定子的中部设有挡在所述第三轴承前侧的环形挡板,所述定子的后端具有螺纹接头,所述螺纹接头穿出所述后壳并通过紧固螺帽固定。
17.进一步地,所述导向杆为螺纹杆,所述限位件为螺纹套接与所述螺纹杆上的调节螺帽。
18.进一步地,所述导向杆上的第一压缩弹簧外罩设有连接在所述滑块和定子之间的伸缩管。
19.进一步地,所述接触感应器包括轴套、固定于所述轴套底部的压力传感器、活动安装于所述轴套内的轴杆、以及支撑于所述压力传感器和轴杆之间的第二压缩弹簧,所述轴杆的径向外端伸出所述轴套,用于与所述滑块的抵接部相抵,所述控制器根据所述压力传感器获取的压力变化输出信号控制输送机调节供料速度。
20.进一步地,所述机架的前侧固定安装有罩设于所述环模和喂料罩外的外壳罩,所述外壳罩的前侧设有供所述输送机穿过的开口,外壳罩的底部设有下料口。
21.进一步地,所述输送机为螺旋输送机。
22.本发明的有益效果体现在:
23.工作时,原料通过输送机输送进入环模的内腔,驱动机构驱动转子带动环模转动,环模转动时,通过原料与压辊之间的摩擦力带动压辊转动,原料被挤压穿过环模上的模孔,从而被压制成圆柱状的颗粒。
24.正常工作状态下,第一压缩弹簧将滑块顶紧在导向杆上的限位件上,当输送机供料的速度过快,原料从环模的动模孔挤出的速度跟不上供料的速度,会导致环模内壁供料区的原料厚度增加,环模内壁的原料厚度增加后,会推动压辊向定子滑移,从而带动滑块沿导向杆向定子滑动,当滑块上的抵接部与其内侧的接触感应器接触后,接触感应器向控制器发出信号,控制器接收到接触感应器发出的信号后,再输出信号控制输送机减小供料的速度,直至环模内壁供料区的原料恢复到正常厚度,接触感应器与滑块上的抵接部分离。
25.因此,本技术可通过监测环模内壁供料区的原料厚度,来实时控制输送机的供料速度,以避免供料区的原料厚度超出能带动压辊转动的极限厚度,从而避免供料速度过快导致压辊被卡,发生剧烈摩擦,造成发热甚至烧焦的情况发生。
附图说明
26.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
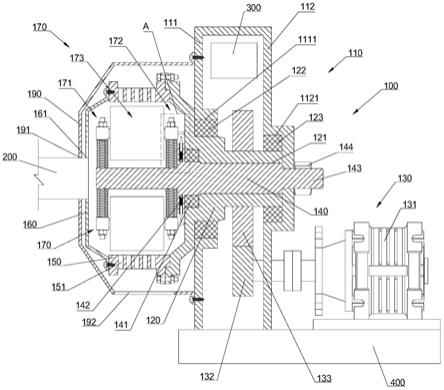
27.图1为本发明实施例的结构示意图;
28.图2为图1中的a部放大图。
29.附图中,100
‑
制粒机构;110
‑
机架;111
‑
前壳;1111
‑
安装孔;112
‑
后壳;1121
‑
安装槽;120
‑
转子;121
‑
轴孔;122
‑
第一轴承;123
‑
第二轴承;130
‑
驱动机构;131
‑
电机;132
‑
主动轮;133
‑
从动轮;140
‑
定子;141
‑
第三轴承;142
‑
环形挡板;143
‑
螺纹接头;144
‑
紧固螺帽;150
‑
环模;151
‑
模孔;160
‑
喂料罩;161
‑
进料口;170
‑
压辊组件;171
‑
前支架;172
‑
后支架;173
‑
压辊;174
‑
导向杆;175
‑
滑块;1751
‑
抵接部;176
‑
限位件;177
‑
第一压缩弹簧;178
‑
伸缩管;180
‑
接触感应器;181
‑
轴套;182
‑
压力传感器;183
‑
轴杆;184
‑
第二压缩弹簧;190
‑
外壳罩;191
‑
开口;192
‑
下料口;200
‑
输送机;300
‑
控制器;400
‑
底座。
具体实施方式
30.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
31.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
32.如图1和图2所示,本发明实施例提供了一种用于饲料加工的制粒设备,包括制粒机构100、输送机200和控制器300。
33.制粒机构100包括机架110、转子120、驱动机构130和定子140。
34.转子120转动安装于机架110,转子120内设置有前后贯穿的轴孔121,转子120的前端固定安装有环模150,环模150的周壁上分布有模孔151,环模150的前端设置有喂料罩160,喂料罩160上设有进料口161。本实施例中,机架110的前侧固定安装有罩设于环模150和喂料罩160外的外壳罩190,以将环模150和喂料罩160保护于外壳罩190内,外壳罩190的前侧设有供输送机200穿过的开口191,外壳罩190的底部设有下料口192。
35.定子140的后部从转子120的轴孔121穿过并固定于机架110,定子140的前部穿入环模150。
36.具体来说,本实施例中,机架110具有前壳111和后壳112,前壳111上设置有安装孔1111,后壳112上设置有安装槽1121,转子120的中部通过第一轴承122固定于安装孔1111内,转子120后端的端部通过第二轴承123固定于安装槽1121内,这样能够减小转子120与机架110之间的转动摩擦。定子140的后端固定于后壳112,定子140的中部通过第三轴承141固定于转子120的轴孔121的前端,这样能够减小定子140与转子120之间的转动摩擦。
37.优选地,定子140的中部设有挡在第三轴承141前侧的环形挡板142,以通过环形挡板142对第三轴承141进行保护,避免物料进入第三轴承141,为了便于安装定子140,定子140的后端具有螺纹接头143,螺纹接头143穿出后壳112并通过紧固螺帽144固定。
38.驱动机构130用于驱动转子120转动。具体来说,在本实施例中,驱动机构130包括电机131,电机131和机架110固定在一底座400上,前壳111和后壳112之间设有传动机构,电机131通过传动机构与转子120相连,优选地,传动机构包括相啮合的主动轮132和从动轮133,主动轮132同轴安装于电机131的输出轴上,从动轮133同轴安装于转子120上。
39.定子140的前部周向环设有若干组压辊组件170,每组压辊组件170均包括前后相对设置的前支架171和后支架172、以及设于前支架171和后支架172之间的压辊173,前支架
171和后支架172均包括固定于定子140外并沿径向延伸的导向杆174、滑动套设于导向杆174上的滑块175、固定于导向杆174上并支撑于滑块175外的限位件176、以及套在导向杆174上并支撑于滑块175和定子140之间的第一压缩弹簧177,压辊173转动安装于前支架171和后支架172的滑块175之间。
40.本实施例中,导向杆174为螺纹杆,限位件176为螺纹套接与螺纹杆上的调节螺帽。在工作状态时,滑块175通过第一压缩弹簧177抵紧在限位件176,本技术可通过旋转限位件176来调节滑块175在导向杆174上的位置,进而调节压辊173与环模150之间的间隙,调节方便、可靠。
41.本实施例中,导向杆174上的第一压缩弹簧177外罩设有连接在滑块175和定子140之间的伸缩管178,伸缩管178不会影响滑块175的移动,同时能够对第一压缩弹簧177进行保护,避免物料沉积在第一压缩弹簧177内而影响第一压缩弹簧177的伸缩。
42.定子140上位于后支架172的滑块175的径向内侧设置有接触感应器180,滑块175上具有能够与接触感应器180接触的抵接部1751。输送机200用于向进料口161内输送原料,本实施例中,输送机200具体可为螺旋输送机200。
43.控制器300具体采用plc控制器300,控制器300的输入端与接触感应器180电连接,控制器300的输出端与输送机200电连接。
44.工作时,原料通过输送机200输送进入环模150的内腔,驱动机构130驱动转子120带动环模150转动,环模150转动时,通过原料与压辊173之间的摩擦力带动压辊173转动,原料被挤压穿过环模150上的模孔151,从而被压制成圆柱状的颗粒。
45.正常工作状态下,第一压缩弹簧177将滑块175顶紧在导向杆174上的限位件176上,当输送机200供料的速度过快,原料从环模150的动模孔151挤出的速度跟不上供料的速度,会导致环模150内壁供料区的原料厚度增加,环模150内壁的原料厚度增加后,会推动压辊173向定子140滑移,从而带动滑块175沿导向杆174向定子140滑动,当滑块175上的抵接部1751与其内侧的接触感应器180接触后,接触感应器180向控制器300发出信号,控制器300接收到接触感应器180发出的信号后,再输出信号控制输送机200减小供料的速度,直至环模150内壁供料区的原料恢复到正常厚度,接触感应器180与滑块175上的抵接部1751分离。
46.具体来说,本实施例中,参照图2,接触感应器180包括轴套181、固定于轴套181底部的压力传感器182、活动安装于轴套181内的轴杆183、以及支撑于压力传感器182和轴杆183之间的第二压缩弹簧184,轴杆183的径向外端伸出轴套181,用于与滑块175的抵接部1751相抵,控制器300根据压力传感器182获取的压力变化输出信号控制输送机200调节供料速度。
47.环模150内壁供料区的原料厚度增加时,压辊173会带动滑块175沿导向杆174向定子140滑动,当滑块175上的抵接部1751与轴杆183接触时,滑块175会推动轴杆183向轴套181的底部挤压第二压缩弹簧184,第二压缩弹簧184被压缩,此时压力传感器182检测到的压力增大,这样即可通过压力传感器182压力的变化来反应环模150内壁供料区的原料厚度,进而依据压力传感器182压力的变化来自动控制输送机200调节供料速度。
48.综上,本技术可通过监测环模150内壁供料区的原料厚度,来实时控制输送机200的供料速度,以避免供料区的原料厚度超出能带动压辊173转动的极限厚度,从而避免供料
速度过快导致压辊173被卡,发生剧烈摩擦,造成发热甚至烧焦的情况发生。
49.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1