一种动态防碰撞喷涂机器人底座装置的制作方法
1.本实用新型涉及机器人防碰撞领域,具体是一种动态防碰撞喷涂机器人底座装置。
背景技术:
2.随着国家环保要求的日益提高,喷涂机器人的应用将深入各行各业。目前喷涂机器人一般采用固定安装模式,机器人底座与地面可靠连接。但是该安装模式固化了机器人的工作空间,喷涂机器人无法喷涂尺寸较长的工件。为解决该问题,现有技术采用以下方案:1、将工件吊挂在输送链上,工件沿着输送链方向运行,工件相对机器人运动,以此实现对尺寸较长工件的喷涂。但缺点是,针对体积大、重量重的工件,如高铁车身、油罐车罐体等,由于喷房大小限制,输送轨道污染等问题,无法实现工件的移动;2、工件不动,移动喷涂机器人,实现机器人的边走边喷,为此现有技术将机器人底座安装在导轨上,机器人底座在导轨上滑动,以此实现机器人底座的移动。缺点是,针对尺寸在数十米的待喷涂的工件,一台喷涂机器人需要在几十米的导轨上滑动,需要时间,满足不了节拍需求,需要同时有两台或者两台以上喷涂机器人在同一导轨上同时进行运动喷涂,为防止同一导轨上的喷涂机器人在运动过程中发生碰撞,必须限定每一台机器人的工作范围。现有的技术是将限位开关固定安装在导轨上,喷涂机器人只能在固定的限位开关位置内滑动,否则会触动限位开关,机器人将停止运动。由于工件规格不一,喷涂机器人喷涂不同工件,在导轨上滑动的位置也在随时变化,限位开关的固定安装,限制了机器人的喷涂范围,影响了喷涂节拍,如果不安装限位开关,多台机器人在同一轨道运行时,会发生碰撞的危险。为满足尺寸长的工件多台机器人协同喷涂的需要,一种动态防碰撞喷涂机器人底座装置必不可少。
技术实现要素:
3.为了解决上述问题,本实用新型提出一种动态防碰撞喷涂机器人底座装置。
4.一种动态防碰撞喷涂机器人底座装置,包括喷涂机器人一、喷涂机器人二、设置在喷涂机器人一、喷涂机器人二上的喷涂机器人底座一、喷涂机器人底座二还包括:
5.导轨部分,用于限制喷涂机器人一、喷涂机器人二的移动方向并进行极限限位;
6.限位装置部分,对喷涂机器人一、喷涂机器人二在导轨部分的移动距离进行有效限位。
7.所述的导轨部分包括用于使得喷涂机器人一、喷涂机器人二进行y方向的移动的导轨一、导轨二、设置在导轨一、导轨二两侧端上用于对喷涂机器人一、喷涂机器人二进行限位防止喷涂机器人一、喷涂机器人二冲出导轨的前限位块、后限位块。
8.所述的限位装置部分包括设置在喷涂机器人底座一、喷涂机器人底座二上按照顺序安装的限位装置一、限位装置二、限位装置三、限位装置四、限位装置五、限位装置六、限位装置七、限位装置八。
9.所述的限位装置一、限位装置二、限位装置三、限位装置四、限位装置五、限位装置
六、限位装置七、限位装置八均为同种结构,该结构包括固定在喷涂机器人底座一、喷涂机器人底座二上的弹簧、安装在弹簧上的限位开关。
10.本实用新型的有益效果是:本实用新型使多台喷涂机器人在同一导轨上实现动态运行,相对现有固定每台机器人工作空间,本实用新型大大增加机器人的动态工作空间,增加了对不同规格工件的适应性,大大方便了机器人轨迹的试教;本实用新型优化了多台机器人的协同控制,提升了喷涂节拍,为客户节省喷涂等待时间,进而降低客户成本;本实用新型改变了现有的碰撞检测方法,由静态检测变更为动态检测,无需在导轨一、导轨二上安装设备,增加了防碰撞装置的独立性,便于安装和操作;弹簧的使用避免了碰撞造成设备的损坏,减少了客户的售后维护成本。
附图说明
11.下面结合附图和实施例对本实用新型进一步说明。
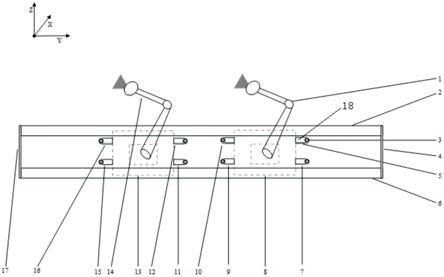
12.图1为本实用新型的俯视结构示意图。
具体实施方式
13.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本实用新型进一步阐述。
14.如图1所示,一种动态防碰撞喷涂机器人底座装置,包括喷涂机器人一1、喷涂机器人二14、设置在喷涂机器人一1、喷涂机器人二14上的喷涂机器人底座一8、喷涂机器人底座二13,还包括:
15.导轨部分,用于限制喷涂机器人一1、喷涂机器人二14的移动方向并进行极限限位;
16.限位装置部分,对喷涂机器人一1、喷涂机器人二14在导轨部分的移动距离进行有效限位。
17.本实用新型使多台喷涂机器人在同一导轨上实现动态运行,相对现有固定每台机器人工作空间,本实用新型大大增加机器人的动态工作空间,增加了对不同规格工件的适应性,大大方便了机器人轨迹的试教;本实用新型优化了多台机器人的协同控制,提升了喷涂节拍,为客户节省喷涂等待时间,进而降低客户成本;本实用新型改变了现有的碰撞检测方法,由静态检测变更为动态检测,无需在导轨一2、导轨二6上安装设备,增加了防碰撞装置的独立性,便于安装和操作;弹簧5的使用避免了碰撞造成设备的损坏,减少了客户的售后维护成本。
18.所述的喷涂机器人底座一8、喷涂机器人底座二13可靠固定喷涂机器人一1、喷涂机器人二14,且可平滑在导轨一2、导轨二6上前后运动,并确保喷涂机器人一1、喷涂机器人二14在运动时平稳可靠;,喷涂机器人底座一8、喷涂机器人底座二13两侧分别提供两个限位装置部分的安装孔位,且喷涂机器人底座一8、喷涂机器人底座二13的安装孔位要一致,以确保喷涂机器人一1、喷涂机器人二14的限位装置部分可触碰成功。
19.所述的导轨部分包括用于使得喷涂机器人一1、喷涂机器人二14进行y方向的移动的导轨一2、导轨二6、设置在导轨一2、导轨二6两侧端上用于对喷涂机器人一1、喷涂机器人二14进行限位防止喷涂机器人一1、喷涂机器人二14冲出导轨的前限位块4、后限位块17。
20.前限位块4安装在导轨一2、导轨二6的最右侧,后限位17块安装在导轨一2、导轨二6的最左侧,前限位块4和后限位块17组成整个导轨一2、导轨二6的两侧限位,防止喷涂机器人一1、喷涂机器人二14冲出导轨一2、导轨二6;当喷涂机器人底座一8右侧的限位装置一18或限位装置二7触碰到前限位块4,则喷涂机器人一1及其底座停止运行,当喷涂机器人底座二13左侧的限位装置七15或限位装置八16触碰到后限位块17,则喷涂机器人二14及其底座停止运行。
21.所述的限位装置部分包括设置在喷涂机器人底座一8、喷涂机器人底座二13上按照顺序安装的限位装置一18、限位装置二7、限位装置三9、限位装置四10、限位装置五11、限位装置六12、限位装置七15、限位装置八16。
22.限位装置部分安装在喷涂机器人底座一8、喷涂机器人底座二13的安装孔位,其中弹簧5固定在喷涂机器人底座一8、喷涂机器人底座二13的安装孔位上,限位开关3安装在弹簧5的另一端,主要是当限位开关3相互触碰或者限位开关3触碰到限位块后停止喷涂机器人一1、喷涂机器人二14的前进;当限位开关3触碰后,喷涂机器人一1、喷涂机器人二14进不会立刻停止,由于惯性的作用喷涂机器人底座一8、喷涂机器人底座二13会向前继续运动,会导致限位开关3因碰撞而损坏,此时需要通过弹簧5来降低喷涂机器人底座一8、喷涂机器人底座二13运动带来的惯性,避免限位开关3因碰撞而损坏。
23.所述的限位装置一18、限位装置二7、限位装置三9、限位装置四10、限位装置五11、限位装置六12、限位装置七15、限位装置八16均为同种结构,该结构包括固定在喷涂机器人底座一8、喷涂机器人底座二13上的弹簧5、安装在弹簧5上的限位开关3。
24.工作原理:
25.1、待喷涂工件沿着y正方向进入喷房,导轨一2、导轨二6沿着y方向铺设,工件长度小于导轨一2、导轨二6长度,喷涂机器人一1初始位置在前限位块4,限位装置一18和限位装置二7未触碰到前限位块4;喷涂机器人二14初始位置在后限位块17,限位装置七15和限位装置八16未触碰到后限位块17,进入步骤2;
26.2、当待喷涂工件在喷房放置完成,喷涂机器人一1沿着导轨一2、导轨二6往y负方向喷涂工件;喷涂机器人二14沿着导轨一2、导轨二6往y正方向喷涂工件,进入步骤3;
27.3、喷涂机器人一1和喷涂机器人二14相向运动,如果在喷涂机器人一1和喷涂机器人二14都完成工件喷涂,两台机器人底座未触碰,则进入步骤6;如果喷涂机器人一1和喷涂机器人二14在喷涂过程中在导轨一2、导轨二6的某个位置相遇,进而发生碰撞,此时限位装置四10触碰到限位装置六12,限位装置三9触碰到限位装置五11,那么喷涂机器人一1和喷涂机器人二14将会同时停止运动,进入步骤4;
28.4、当喷涂机器人一1和喷涂机器人二14出现碰撞停止后,需要手动将喷涂机器人底座一8移动到前限位块4,需要手动将喷涂机器人底座二13移动到后限位块17,进入步骤5;
29.5、修改喷涂机器人一1的喷涂轨迹,修改喷涂机器人二14的喷涂轨迹,进入步骤2;
30.6、当喷涂机器人一1完成工件喷涂,喷涂机器人底座一8将会自动回到前限位块4位置;当喷涂机器人二14完成工件喷涂,喷涂机器人底座二13将会自动回到后限位块17位置,进入步骤2;
31.本实用新型描述方向如附图中的坐标所示,x表示喷涂机器人一1和喷涂机器人二
14的x方向,y表示喷涂机器人一1和喷涂机器人二14的y方向,z表示喷涂机器人一1和喷涂机器人二14的z方向。
32.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1