一种自动化电动移液枪托的制作方法
1.本技术涉及移液头技术领域,具体而言,涉及一种自动化电动移液枪托。
背景技术:
2.甲基化,是指从活性甲基化合物上将甲基催化转移到其他化合物的过程,可形成各种甲基化合物,或是对某些蛋白质或核酸等进行化学修饰形成甲基化产物,目前,在对甲基化进行纯化时,通过纯化机器带动移液头左右移动以及上下升降,同时,通过移液头与纯化机内的吸取部配合实现对液体的吸取、转移以及排出,最终对液体机进行混匀,整体进行纯化,参考常规的自动化电动移液枪托设计,移液头和纯化机器之间基本均为固定式设计,导致在实际使用时,面对不同高低的样本盒或样本存储管时,只能依靠纯化机器带动升降,同时,纯化机器在升降移动过程中具有一定抖动振幅,当移液头需要插入存储管内时,由于抖动振幅原因,降低其插入精准度,整体设计具有一定局限性。
技术实现要素:
3.为了弥补以上不足,本技术提供了一种自动化电动移液枪托,旨在改善上述提出的问题。
4.本技术实施例提供了一种自动化电动移液枪托,包括支护组件和驱吸组件。
5.所述支护组件包括支撑壳、防护壳和防部,所述防护壳和所述防部均固定连接于所述支撑壳内,所述驱吸组件包括驱动部和移液头体,所述移液头体包括支撑头和固定头,所述支撑头滑动连接于所述防护壳内,所述固定头固定连接于所述支撑头上表面,所述支撑头上表面贯穿于所述防护壳上表面且延伸至外部,所述驱动部包括马达和丝杆,所述马达和所述丝杆传动连接,且所述马达安装于所述防部内,所述丝杆一端贯穿于所述防护壳上表面且螺纹连接于所述固定头内。
6.在上述实现过程中,通过支撑壳与外部纯化机器固定连接,通过外部纯化机器带动本装置移动和升降,通过移液头体与纯化机器吸附装置连通,通过移液头体吸附外部管体以及液体,整体通过操作外部纯化机器实现一些列纯化,通过外部纯化机器操作支撑头下降到一定高度后,启动马达,通过移液头体滑动设计,同时,通过马达带动丝杆转动,通过丝杆带动移液头体进行下降,通过移液头体与纯化机器吸附装置配合,实现对管体以及液体的吸附,随后进行换液以及混匀,通过防护壳和防部设计,整体实现对本装置防护,提升使用寿命,通过本装置的设计,整体设计优化常规的自动化电动移液枪托设计,面对不同高低的样本盒或样本存储管时,通过本装置可对其进行纯化,同时,通过本装置进行纯化时可降低整体抖动振幅,使移液头体插入时提升精准度,整体设计降低使用局限性。
7.在一种具体的实施方案中,所述支撑壳内固定连接有支撑台,所述丝杆一端转动连接于所述支撑台底部。
8.在上述实现过程中,通过支撑台设计,整体设计实现丝杆转动连接设计,支撑台底部设置有轴承,整体实现丝杆的转动。
9.在一种具体的实施方案中,所述防护壳内分别开设有通槽和空腔,所述丝杆一端贯穿于所述通槽且延伸至内部,所述支撑头上表面贯穿于所述空腔且延伸至外部。
10.在上述实现过程中,通过通槽和空腔设计,整体设计实现丝杆贯穿以及支撑头上表面的贯穿,实际使用时,支撑头贯穿后与纯化机器内部的吸取部连通,通过支撑头进行吸取外部管体。
11.在一种具体的实施方案中,所述防护壳上表面与所述防部底部之间连通有防护管,所述丝杆一端贯穿于所述防护管且延伸至所述通槽内。
12.在上述实现过程中,通过防护管设计,使其实现对丝杆的防护,避免实际使用时,丝杆对外部造成伤害。
13.在一种具体的实施方案中,所述支护组件还包括控制器,所述控制器与所述马达电性连接。
14.在上述实现过程中,通过控制器实现控制马达的启停。
15.在一种具体的实施方案中,所述防部包括罩座和罩盖,所述罩座和所述罩盖螺栓固定,所述马达固定安装于所述罩座上表面。
16.在上述实现过程中,通过罩座和罩盖整体构成防部,通过罩座和罩盖实现对马达的防护,同时,实现对马达和丝杆传动连接位置的防护。
17.在一种具体的实施方案中,所述马达输出轴端固定连接有第一齿轮,所述丝杆外壁固定套接有第二齿轮,所述第一齿轮和所述第二齿轮啮合。
18.在上述实现过程中,通过第一齿轮和所述第二齿轮啮合设计,整体设计实现通过马达带动丝杆转动,使其便于控制支撑头升降,同时,降低整体抖动,第一齿轮和所述第二齿轮均位于罩座和罩盖之间,实现对其防护。
19.在一种具体的实施方案中,所述支撑头外壁对称固定连接有滑块,所述防护壳内壁对称开设有滑槽,所述滑块滑动连接于所述滑槽内。
20.在上述实现过程中,通过滑块和滑槽设计,整体设计实现支撑头滑动连接设计,进而便于调节支撑头升降。
21.在一种具体的实施方案中,所述支撑头上表面连通有导管,所述导管贯穿于所述空腔且延伸至外部。
22.在上述实现过程中,通过导管设计,整体设计便于支撑头与纯化机械内吸附部连通,进而通过支撑头对外部管体以及液体吸附。
23.在一种具体的实施方案中,所述防护管内开设有贯穿孔,所述丝杆贯穿于所述贯穿孔且延伸至所述通槽内。
24.在上述实现过程中,通过贯穿孔设计,整体设计实现丝杆贯穿防护管。
附图说明
25.为了更清楚地说明本技术实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
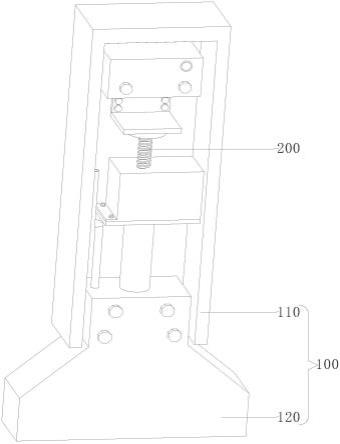
26.图1是本技术实施方式提供的后视结构示意图;
27.图2为本技术实施方式提供的后视剖视结构示意图;
28.图3为本技术实施方式提供的支护组件后视剖视结构示意图;
29.图4为本技术实施方式提供的移液头体后视剖视结构示意图。
30.图中:100-支护组件;110-支撑壳;111-支撑台;120-防护壳;121-通槽;122-防护管;1221-贯穿孔;123-滑槽;124-空腔;130-控制器;140-防部;141-罩座;142-罩盖;200-驱吸组件;210-驱动部;211-马达;2111-第一齿轮;212-丝杆;2121-第二齿轮;220-移液头体;221-支撑头;2211-滑块;2212-导管;222-固定头。
具体实施方式
31.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
32.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
33.请参阅图1,本技术提供一种自动化电动移液枪托,包括支护组件100和驱吸组件200。
34.其中,通过支护组件100实现支撑以及防护,通过驱吸组件200实现驱动,使其提升适用范围。
35.请参阅图1、图2和图3,支护组件100包括支撑壳110、防护壳120和防部140,防护壳120和防部140均固定连接于支撑壳110内,支撑壳110内固定连接有支撑台111,丝杆212一端转动连接于支撑台111底部,通过支撑台111设计,整体设计实现丝杆212转动连接设计,支撑台111底部设置有轴承,整体实现丝杆212的转动,防护壳120内分别开设有通槽121和空腔124,丝杆212一端贯穿于通槽121且延伸至内部,支撑头221上表面贯穿于空腔124且延伸至外部,通过通槽121和空腔124设计,整体设计实现丝杆212贯穿以及支撑头221上表面的贯穿,实际使用时,支撑头221贯穿后与纯化机器内部的吸取部连通,通过支撑头221进行吸取外部管体。
36.在本技术文件中,防护壳120上表面与防部140底部之间连通有防护管122,丝杆212一端贯穿于防护管122且延伸至通槽121内,通过防护管122设计,使其实现对丝杆212的防护,避免实际使用时,丝杆212对外部造成伤害,支护组件100还包括控制器130,控制器130与马达211电性连接,通过控制器130实现控制马达211的启停,防部140包括罩座141和罩盖142,罩座141和罩盖142螺栓固定,马达211固定安装于罩座141上表面,通过罩座141和罩盖142整体构成防部140,通过罩座141和罩盖142实现对马达211的防护,同时,实现对马达211和丝杆212传动连接位置的防护。
37.请参阅图1、图2和图4,驱吸组件200包括驱动部210和移液头体220,移液头体220包括支撑头221和固定头222,支撑头221滑动连接于防护壳120内,支撑头221外壁对称固定连接有滑块2211,防护壳120内壁对称开设有滑槽123,滑块2211滑动连接于滑槽123内,通过滑块2211和滑槽123设计,整体设计实现支撑头221滑动连接设计,进而便于调节支撑头221升降,固定头222固定连接于支撑头221上表面,支撑头221上表面贯穿于防护壳120上表
面且延伸至外部,支撑头221上表面连通有导管2212,导管2212贯穿于空腔124且延伸至外部,通过导管2212设计,整体设计便于支撑头221与纯化机械内吸附部连通,进而通过支撑头221对外部管体以及液体吸附,防护管122内开设有贯穿孔1221,丝杆212贯穿于贯穿孔1221且延伸至通槽121内,通过贯穿孔1221设计,整体设计实现丝杆212贯穿防护管122。
38.在本实施例中,驱动部210包括马达211和丝杆212,马达211和丝杆212传动连接,马达211输出轴端固定连接有第一齿轮2111,丝杆212外壁固定套接有第二齿轮2121,第一齿轮2111和第二齿轮2121啮合,通过第一齿轮2111和第二齿轮2121啮合设计,整体设计实现通过马达211带动丝杆212转动,使其便于控制支撑头221升降,同时,降低整体抖动,第一齿轮2111和第二齿轮2121均位于罩座141和罩盖142之间,实现对其防护,且马达211安装于防部140内,丝杆212一端贯穿于防护壳120上表面且螺纹连接于固定头222内。
39.具体的,该自动化电动移液枪托的工作原理:使用时,通过支撑壳110与外部纯化机器固定连接,通过外部纯化机器带动本装置移动和升降,通过导管2212与纯化机器吸附装置连通,通过支撑头221吸附外部管体以及液体,整体通过操作外部纯化机器实现一些列纯化,通过外部纯化机器操作支撑头221下降到一定高度后,启动马达211,通过支撑头221滑动设计,同时,通过马达211带动丝杆212转动,通过丝杆212带动支撑头221进行下降,通过支撑头221与纯化机器吸附装置配合,实现对管体以及液体的吸附,随后进行换液以及混匀,通过本装置的设计,整体设计优化常规的自动化电动移液枪托设计,面对不同高低的样本盒或样本存储管时,通过本装置可对其进行纯化,同时,通过本装置进行纯化时可降低整体抖动振幅,使移液头体220插入时提升精准度,整体设计降低使用局限性。
40.需要说明的是,控制器130和马达211具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
41.控制器130和马达211的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
42.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
43.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1