一种新型木板刮腻子机的制作方法
1.本实用新型涉及一种新型木板刮腻子机。
背景技术:
2.生产家具用的木板,在成型过程中,多需要在板面上涂抹腻子,以达到较高的平整度和强度。目前,木板的刮腻子作业一般是由刮腻子机完成,现有的刮腻子机的上下刮刀在调整好位置后,其位置是固定不动到,当一些不平整或者表面有凸起的木板通过上下刮刀之间时,因上下刮刀不能进行上下微量活动,导致木板的表面常被刮刀损坏,继而导致木板无法有效完成刮腻子整体工作;同时,现有的腻子机在进行刮腻子作业过程中,其腻子池内腻子浆流动性较差,导致腻子在木板上附着效果也差,继而影响了木板刮腻子效果。
技术实现要素:
3.本实用新型的目的在于提供一种新型木板刮腻子机,该刮腻子机在进行木板刮腻子作业时,通过螺旋搅拌轴的搅拌作用,可保证腻子浆的流动性;上刮刀和下刮刀在木板的挤压下,能够进行自适应微量活动,从而可避免木皮表面被破坏,继而提高了木板刮腻子质量。
4.本实用新型解决其技术问题所采取的技术方案是:一种新型木板刮腻子机,包括整机支架、腻子刮取组合刀具、腻子池、腻子搅拌机构,所述腻子刮取组合刀具包括上刀架、上刮刀、下刀架、下刮刀、上刀减负机构、下刀减负机构、上刀调节定位机构、下刀调节定位机构,所述上刀架、下刀架、上刀减负机构、下刀减负机构、上刀调节定位机构和下刀调节定位机构均设置在所述整机支架上,所述上刀架和下刀架呈上下状态分布,所述上刮刀设置在所述上刀架下侧,所述下刮刀设置在所述下刀架上侧,且上刮刀和下刮刀呈八字形分布,所述上刀架和下刀架的后侧壁构成所述腻子池的前池壁,所述上刀调节定位机构用于实现所述上刮刀的调节定位,所述下刀调节定位机构用于实现下刮刀的调节定位,所述上刀减负机构用于向所述上刀架施加一个向上的推力,所述下刀减负机构用于向所述下刀架施加一个向上的推力,利用上刀调节定位机构对上刀架的支撑及下刀调节定位机构对下刀架的支撑,在木板通过上刮刀和下刮刀之间的出板口时,上刮刀和下刮刀在木板的挤压下能够进行上下微量活动;所述腻子池用于盛放腻子浆;所述腻子搅拌机构包括两个螺旋搅拌轴,两个所述螺旋搅拌轴上下分布在所述腻子池内。
5.优选地,所述上刀减负机构包括两个第一弹簧,所述下刀减负机构包括两个第二弹簧,在所述整机支架的左右两侧分别固定设置一竖直导向杆,所述上刀架和下刀架的左右两端均分别套置在对应的两个所述竖直导向杆上,且上刀架和下刀架相对于所述竖直导向杆能够自由滑动,两个第一弹簧和两个第二弹簧均分别对应套置在两个所述竖直导向杆上,且第一弹簧卡置在上刀架与竖直导向杆的中部设置的中支撑板之间,所述第二弹簧卡置在下刀架与竖直导向杆的下部设置的下支撑板之间。
6.进一步地,所述上刀调节定位机构包括调节驱动机构和第一定位机构,所述第一
定位机构包括两个第一行程可调节气缸,两个所述第一行程可调节气缸分别左右设置在所述整机支架上,且第一行程可调节气缸的活塞杆的下部与对应的所述上刀架的端部相连接,所述调节驱动机构用于调节两个所述第一行程调节气缸的活塞杆进行上下同步移动定位;所述下刀调节定位机构包括两个第二行程可调节气缸,两个所述第二行程可调节气缸分别左右设置在所述整机支架上,且第二行程可调节气缸的活塞杆的下部与对应的所述下刀架的端部相连接。
7.优选地,该腻子机还包括一木板输送机构,所述木板输送机构包括两组滚压输送机构,两组所述滚压输送机构前后依次设置在所述腻子池后侧,每一组所述滚压输送机构均包括呈上下分布状态的上辊轴和下辊轴,木板通过上辊轴和下辊轴的滚动输送进入到腻子池内。
8.进一步地,位于所述上刀架后方的所述螺旋搅拌轴,通过两个第三行程可调节气缸实现在整机支架上的定位,每一个所述上辊轴均通过两个第四行程可调节气缸实现在整机支架上的定位,所述调节驱动机构包括提升板、驱动管、驱动螺纹杆,位于整机支架一侧的所述第一行程可调节气缸和两个第四行程可调节气缸的活塞杆上端均套在一所述提升板上,第一行程可调节气缸和第四行程可调节气缸上部的限位螺母用于实现提升板相对于活塞杆的上行限位;在所述提升板的下部固定设置有两个所述驱动管,在每一个所述驱动管下部均套置一所述驱动螺纹杆,四个所述驱动螺纹杆通过链传动方式实现同步转动。
9.进一步地,在所述上辊轴和下辊轴之间设置有多个呈上下分布状态分布的第一上导向杆和第一下导向杆,所述第一上导向杆的下平面与所述上辊轴的下边缘相平齐,所述第一下导向杆的上平面与所述下辊轴的上边缘相平齐,在两个所述螺旋搅拌轴之间设置有多个呈上下分布状态分布的第二上导向杆和第二下导向杆,第一上导向杆和第一下导向杆用于将木板导向进入到腻子池内,第二上导向杆和第二下导向杆用于将木板导向进入到上刮刀和下刮刀之间的出板口内,所述第一上导向杆和第二上导向杆的上部均与一提升架相连接所述提升架的两侧与对应的所述第四行程可调节气缸的活塞杆固定连接。
10.进一步地,在所述木板输送机构的后侧设置一取板机构,所述取板机构包括第一输送辊、吸板机构、矫正机构和压置机构,所述第一输送辊设置在取板支架上,所述吸板机构包括滑行支架、滑行车、真空吸盘,所述滑行支架设置在所述取板支架上,所述滑行车设置在所述滑行支架上,所述真空吸盘设置在所述滑行车下部,滑行车在滑行支架上能够滑行定位,所述矫正机构包括矫正气缸、矫正主动轮和矫正压轮,所述矫正气缸和矫正主动轮分布在所述第一输送辊的两侧,所述矫正主动轮的上边缘与第一输送辊的上边缘相平齐,且矫正主动轮与第一输送辊同步同向转动,所述矫正主动轮用于将木板向第一输送辊右端输送,所述矫正压轮设置在所述矫正主动轮的上方,且矫正压轮与一第一压置气缸的活动端相连接,所述压置机构包括第二输送辊和第二压轮,所述第二输送辊设置在所述第一输送辊与下辊轴之间,三个所述第二压轮设置在所述第二输送辊上方,且第二压轮与对应的一第二压置气缸的的活动端相连接。
11.进一步地,该腻子机还包括一腻子回收机构,所述腻子回收机构包括v形腻子承接池、腻子循环输送机构,在所述v形腻子承接池的内部下侧设置一第一螺旋输送蛟龙,所述腻子循环输送机构包括导流槽、料斗、竖直螺旋输送蛟龙、水平螺旋输送蛟龙,所述导流槽用于将第一螺旋输送蛟龙的出料口流出的腻子导流到料斗内,所述竖直螺旋输送蛟龙用于
将料斗内腻子输送到水平螺旋输送蛟龙内,所述水平螺旋输送蛟龙用于将其内腻子输送到腻子池内。
12.进一步地,在所述上刮刀和下刮刀之间的出板口的两侧均设置一组侧边刮腻子机构,所述侧边刮腻子机构包括转轴、侧边刮刀、上侧边刮刀、拉紧弹簧,所述转轴竖直设置在所述上刀架前侧,且转轴能够自由转动,所述侧边刮刀和上侧边刮刀设置在所述转轴下部,侧边刮刀用于木板的左侧面或右侧面的腻子刮取,上侧边刮刀用于与木板的左侧面或右侧面相邻的上平面的腻子刮取,所述拉紧弹簧用于拉动所述转轴,使得侧边刮刀与对应的木板的左侧面或右侧面相贴合。
13.进一步地,在所述腻子池的前侧设置一接板机构,从所述上刮刀和下刮刀之间移动出的木板直接移动到所述接板机构上,所述接板机构包括条状输送带、同步驱动轴,若干条状输送带沿着左右方向等间距设置在所述整机支架上,所述同步驱动轴用于驱动所述若干条状输送带同步转动。
14.本实用新型的有益效果是:本实用新型结构简单,加工制造便利;通过第一弹簧对上刀架的支撑及第二弹簧对下刀架的支撑,使得第一行程可调节气缸和第二行程可调节气缸的充气压力小,从而在木板对上刮刀和下刮刀进行挤压时,使得上刮刀和下刮刀能够进行上下微量活动,上刮刀和下刮刀微量活动后,减轻了对木板的挤压强度,继而避免了刮刀对木板表面造成破坏,保证了木板刮腻子工作的顺利进行;通过驱动螺纹杆实现驱动管的微量升降,继而可实现上刮刀的上下微量精确调节,上刮刀能够实现精确微量调节,从而可确保上刮刀和下刮刀能对不同厚度的木板刮腻子作业;在刮腻子过程中,利用螺旋搅拌轴对腻子浆的充分搅拌,可使得腻子浆分布均匀,继而提高腻子在木板上的分布质量,从而利于提高木板刮腻子质量;利用取板机构的取板作业,可实现木板输送的机械自动化,利于降低人工劳动强度;利用接板机构的接板功能,可使得木板顺利从上刮刀与下刮刀之间移出,且木板移出过程中,木板保持水平状态,从而利于提高木板刮腻子质量。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的部分优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
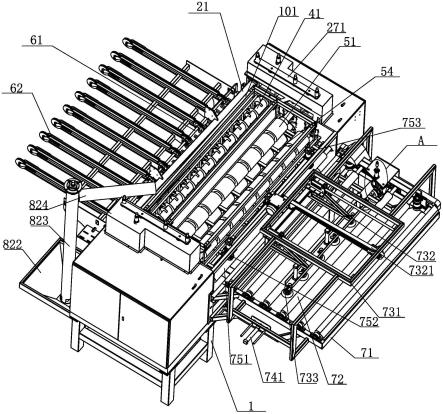
16.图1为本实用新型的整体结构示意图;
17.图2为腻子刮取组合刀具、腻子池及木板输送机构的相对分布示意图;
18.图3为本实用新型的整体结构侧视图;
19.图4为图1中a处放大图;
20.图5为图3中b处放大图;
21.图6为图3中c处放大图;
22.图7为图3中d处放大图;
23.图中:1整机支架、11竖直导向杆、111中支撑板、112下支撑板、12侧板、21上刀架、 22上刮刀、23下刀架、24下刮刀、25第一弹簧、26第二弹簧、271提升板、272驱动管、 273驱动螺纹杆、274驱动链轮、275链条、276第一行程可调节气缸、28第二行程可调节气缸、3腻子
池、41螺旋搅拌轴、42第三行程可调节气缸、43第二上导向杆、44第二下导向杆、51上辊轴、52下辊轴、53第四行程可调节气缸、54第一上导向杆、55第一下导向杆、 61同步驱动轴、62条状输送带、71取板支架、72第一输送辊、731滑行支架、732滑行车、 7321同步带、733真空吸盘、741矫正气缸、742矫正主动轮、743矫正压轮、744第一压置气缸、751第二输送辊、752第二压轮、753第二压置气缸、81v形腻子承接池、811第一螺旋输送蛟龙、82导流槽、83料斗、84竖直螺旋输送蛟龙、85水平螺旋输送蛟龙、91转轴、 92侧边刮刀、93上侧边刮刀、94拉紧弹簧、提升架101。
具体实施方式
24.下面将结合具体实施例及附图1-7,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分优选实施例,而不是全部的实施例。本领域技术人员可以在不违背本实用新型内涵的情况下做类似变形,因此本实用新型不受下面公开的具体实施例的限制。
25.本实用新型提供了一种新型木板刮腻子机(如图1所示),包括整机支架1、腻子刮取组合刀具、腻子池3、腻子搅拌机构,所述腻子刮取组合刀具包括上刀架21、上刮刀22、下刀架23、下刮刀24、上刀减负机构、下刀减负机构、上刀调节定位机构、下刀调节定位机构,所述上刀架21、下刀架23、上刀减负机构、下刀减负机构、上刀调节定位机构和下刀调节定位机构均设置在所述整机支架1上,所述上刀架21和下刀架23呈上下状态分布,所述上刮刀22设置在所述上刀架21下侧,所述下刮刀24设置在所述下刀架23上侧,且上刮刀22和下刮刀24呈八字形分布,在实际应用中,上刮刀22和下刮刀24可设置上刀架21和下刀架 23上设置的刀架底座上,上刮刀22和下刮刀24可相对于刀架底座能够进行移动调节,以便实现上刮刀22和下刮刀24的位置调整,进一步地,在木板沾满腻子后,便于提高腻子在上刮刀22和下刮刀24的阻碍下的流动性,在此,使得上刀架21和下刀架23均呈右前左后倾斜状态设置在所述整机支架1上。腻子池3用于盛放腻子浆,腻子池3的左右池壁由整机支架1上的两个左右侧的侧板12构成,腻子池3的底部由分布在两个侧板12之间的一底板构成,腻子池3的后侧壁由一分布在两个侧板12之间的后板构成,后板与底板之间留有一进板口,进板口通过一橡胶板实现封堵,木板在进入腻子池3内时,木板可将橡胶板推开即可,所述上刀架21和下刀架23的后侧壁构成所述腻子池3的前池壁,所述上刀调节定位机构用于实现所述上刮刀22的调节定位,所述下刀调节定位机构用于实现下刮刀24的调节定位,所述上刀减负机构用于向所述上刀架21施加一个向上的推力,所述下刀减负机构用于向所述下刀架23施加一个向上的推力,利用上刀调节定位机构对上刀架21的支撑及下刀调节定位机构对下刀架23的支撑,在木板通过上刮刀22和下刮刀24之间的出板口时,上刮刀22和下刮刀24在木板的挤压下能够进行上下微量活动,上刮刀22和下刮刀23在木板的挤压下能够进行上下微量活动,即可避免刮刀对木板的表面造成破损,从而可保证刮腻子工作的顺利进行。所述腻子搅拌机构包括两个螺旋搅拌轴41,两个所述螺旋搅拌轴41上下分布在所述腻子池3内,在刮腻子作业过程中,通过两个螺旋搅拌轴41对腻子浆的充分搅拌,可提高腻子浆的流动性,继而使得腻子能够充分粘附在木板表面,从而可利于提高后续木板的刮腻子质量,螺旋搅拌轴41驱动方式为本领域内公知技术,在此,不再做详细描述。
26.在上述实施例中,上刀减负机构和下刀减负机构的具体实施方式为:所述上刀减
负机构包括两个第一弹簧25,所述下刀减负机构包括两个第二弹簧26,在所述整机支架1的左右两侧分别固定设置一竖直导向杆11,所述上刀架21和下刀架23的左右两端均分别套置在对应的两个所述竖直导向杆11上,且上刀架21和下刀架23相对于所述竖直导向杆11能够自由滑动,具体的,在上刀架21和下刀架23的两端均设置一导向筒,导向筒套置在相应的竖直导向杆11上,且上刀架21和下刀架23呈上下状态分布,两个第一弹簧25和两个第二弹簧26均分别对应套置在两个所述竖直导向杆11上,且第一弹簧25卡置在上刀架21与竖直导向杆11的中部设置的中支撑板111之间,所述第二弹簧26卡置在下刀架23与竖直导向杆 11的下部设置的下支撑板112之间,两个第一弹簧25向上推动上导向筒,从而可减小上刀架21向下施加的压力,上刀架21向下施加的压力小,从而可降低上刀调节定位机构调节上刀架21位置时的负载,利用实现上刀架21的灵活移动,两个第二弹簧26向上推动导向筒,从而可减小下刀架23向下施加的压力;下刀架23向下施加的压力小,从而可降低下刀调节定位机构调节下刀架23位置时的负载,利用实现下刀架23的灵活移动。
27.上刀调节定位机构及下刀调节定位机构的具体实施方式为:所述上刀调节定位机构包括调节驱动机构和第一定位机构,所述第一定位机构包括两个第一行程可调节气缸276,两个所述第一行程可调节气缸276分别左右设置在所述整机支架1上,且第一行程可调节气缸276 的活塞杆的下部与对应的所述上刀架21的端部相连接,所述调节驱动机构用于调节两个所述第一行程调节气缸276的活塞杆进行上下同步移动定位,第一行程调节气缸276的活塞杆的移动,从而可带动上刀架21进行移动,继而带动上刮刀22进行移动;所述下刀调节定位机构包括两个第二行程可调节气缸28,两个所述第二行程可调节气缸28分别左右设置在所述整机支架1上,且第二行程可调节气缸28的活塞杆的下部与对应的所述下刀架23的端部相连接。在实际应用中,第一行程可调节气缸276的上活塞腔室充有一定压力的气体,当木板挤压上刮刀22时,木板对上刮刀22的挤压力依次通过上刮刀22、上刀架21传递到第一行程可调节气缸276的活塞杆上,活塞杆挤压第一行程可调节气缸61的上腔室内的气体,继而可实现活塞杆的微量上移,活塞杆能够实现自适应微量上移,则可保证上刮刀22实现自适应微量上移;第二行程可调节气缸28的下活塞腔室充有一定压力的气体,当木板挤压下刮刀 24时,木板对下刮刀24的挤压力依次通过下刮刀24、下刀架23传递到第二行程可调节气缸 28的活塞杆上,第二行程可调节气缸28的活塞杆受到拉力作用,则对下活塞腔室内的气体进行一定的压缩,从而实现第二行程可调节气缸28的活塞杆的自适应下行微量调节,继而实现下刮刀24的自适应下行微量调节。
28.在实际应用中,为便于使得木板顺利进入到腻子池3内,在此,在腻子池3的后侧设置一木板输送机构,所述木板输送机构包括两组滚压输送机构,两组所述滚压输送机构前后依次设置在所述腻子池3后侧,每一组所述滚压输送机构均包括呈上下分布状态的上辊轴51和下辊轴52,木板通过上辊轴51和下辊轴52的滚动输送进入到腻子池3内,输送时,上辊轴 51和下辊轴52对木板进行上下夹紧,然后,利用上辊轴51和下辊轴52的转动实现木板输送,上辊轴51和下辊轴52的转动驱动为本领域内公知技术,在此,不再做详细描述。
29.为实现位于所述上刀架21后方的所述螺旋搅拌轴41的位置调整及上辊轴51的位置调整,以便实现本腻子机对不同厚度的木板进行刮腻子作业,在此,通过两个第三行程可调节气缸42实现在整机支架1上的定位,通过调节第三行程可调节气缸42可实现对应的螺旋搅拌轴41的位置调整,每一个所述上辊轴51均通过两个第四行程可调节气缸53实现在整
机支架1上的定位,通过调节第四行程可调节气缸53实现对应的上辊轴51的位置调整,在实际应用中,为便于利用调节驱动机构实现上辊轴51及上刮刀22的同步位置调整,以便同步适应不同厚度的木板的刮腻子作业,在此,使得调节驱动机构的具体实施方式为:所述调节驱动机构包括提升板271、驱动管272、驱动螺纹杆273,位于整机支架1一侧的所述第一行程可调节气缸276和两个第四行程可调节气缸53的活塞杆上端均套在一所述提升板271上,第一行程可调节气缸276和第四行程可调节气缸53上部的限位螺母531用于实现提升板271相对于活塞杆的上行限位,即当提升板271相对于活塞杆进行向上滑动时,当提升板271受到限位螺母531的阻碍后,随着提升板271的继续上升,则提升板271带动对应的活塞杆同步上升;在所述提升板271的下部固定设置有两个所述驱动管272,在每一个所述驱动管272 下部均套置一所述驱动螺纹杆273,四个所述驱动螺纹杆273通过链传动方式实现同步转动,具体的,驱动螺纹杆273竖直设置在整机支架1上,在驱动螺纹杆273的下部设置一驱动链轮274,所有的驱动链轮274通过一链条275传动连接在一起,当链条275运行时,则带动所有的驱动螺纹杆273进行转动,驱动螺纹杆273的转动,则实现驱动管272的上升,驱动管272上升,则推动提升板271上升,提升板271的上升,继而带动上刮刀22及上辊轴51 进行上行调节。
30.为便于木板顺利从上辊轴51及下辊轴52之间进入到腻子池3内,在此,在所述上辊轴 51和下辊轴52之间设置有多个呈上下分布状态分布的第一上导向杆54和第一下导向杆55,第一上导向杆54和第一下导向杆55用于将木板导向进入到腻子池3内,所述第一上导向杆 54的下平面与所述上辊轴51的下边缘相平齐,第一上导向杆54的下平面与所述上辊轴51 的下边缘相平齐,能够在第一上导向杆54实现对木板导向的基础上,实现上辊轴51对木板的压紧输送,所述第一下导向杆55的上平面与所述下辊轴52的上边缘相平齐,第一下导向杆55的上平面与所述下辊轴52的上边缘相平齐,能够在第二上导向杆55实现对木板导向的基础上,实现下辊轴52对木板的压紧输送;为便于木板能够顺利从腻子池3内进入到上刮刀 22和下刮刀24之间,在此,在两个所述螺旋搅拌轴41之间设置有多个呈上下分布状态分布的第二上导向杆43和第二下导向杆44,第二上导向杆43和第二下导向杆44用于将木板导向进入到上刮刀22和下刮刀24之间的出板口内,为便于实现第一上导向杆54及第二上导向杆43的同步调整,以便实现不同厚度木板的刮腻子作业,在此,使得所述第一上导向杆54 和第二上导向杆43的上部均与一提升架101相连接,所述提升架101的两侧与对应的所述第四行程可调节气缸53的活塞杆固定连接,当第四行程可调节气缸53带动上辊轴51移动时,同步带动第一上导向杆54和第二上导向杆43进行移动。
31.为便实现木板机械自动化进入到木板输送机构内,在此,在所述木板输送机构的后侧设置一取板机构,所述取板机构包括第一输送辊72、吸板机构、矫正机构和压置机构,所述第一输送辊72设置在取板支架71上,第一输送辊72通过驱动机构进行主动转动,继而可实现位于其上的木板的输送,所述吸板机构包括滑行支架731、滑行车732、真空吸盘733,所述滑行支架731设置在所述取板支架71上,所述滑行车732设置在所述滑行支架731上,所述真空吸盘733设置在所述滑行车732下部,具体的,真空吸盘733通过一气缸实现上下活动,利用真空吸盘733实现木板的吸附;滑行车732在滑行支架731上能够滑行定位,具体的,滑行车732与一同步带7321固定连接,通过同步电机驱动同步带7321的转动,实现滑行车 732在滑行支架731上的滑行定位;所述矫正机构包括矫正气缸741、矫正主动轮742和矫正
压轮743,所述矫正气缸741和矫正主动轮742分布在所述第一输送辊72的两侧,所述矫正主动轮742的上边缘与第一输送辊72的上边缘相平齐,且矫正主动轮742与一第一输送辊 72同步同向转动,所述矫正主动轮742用于将木板向第一输送辊72的右端输送,所述矫正压轮743设置在所述矫正主动轮742的上方,且矫正压轮743与一第一压置气缸744的活动端相连接,利用第一压置气缸744可实现矫正压轮743的上下活动,所述压置机构包括第二输送辊751和第二压轮752,所述第二输送辊751设置在所述第一输送辊72与下辊轴52之间,第二输送辊751与第一输送辊72同步转动,三个所述第二压轮752设置在所述第二输送辊751上方,且第二压轮752与对应的一第二压置气缸753的的活动端相连接,利用第二压置气缸753能够实现第二压轮752的上下活动。取板机构的取板运行流程为:滑行车732向后滑行,当滑行到相应的取板位置后,滑行车732停止滑行,然后,真空吸盘733在气缸的推动下与木板贴合,真空吸盘733利用真空作用实现对木板的吸附,木板被吸附后,真空吸盘733再次在气缸的作用下,将木板提升到一定高度,然后,滑行车732滑行到工作初始位置,继而将木板搬运到若干第一输送辊72上方,滑行车732停止运动后,真空吸盘733再次下行,并将木板放置在第一输送辊72上,木板与真空吸盘733脱离后,矫正气缸741伸出并推动木板的另一端进入到矫正主动轮742及矫正压轮743之间,然后,第一输送辊72、第二输送辊751及矫正主动轮742开启转动,同时,矫正压轮743压置在木板上,从而实现木板的输送及摆放位置的矫正,随着木板不断的移动,当木板移动到第二输送管751上之后,第二压轮752顶压在木板上,继而实现木板的滚动压置,在三个第二压轮752的顶压下,木板则顺利进入到上辊轴51及下辊轴52之间3,从而完成一个木板的取板过程。
32.在利用上刮刀22和下刮刀24进行木板上的腻子刮取作业时,为便于实现多余掉落腻子的收集,在此,在腻子池的下方设置一v形腻子承接池81,掉落的腻子直接落入到v形腻子承接池81中,并最终流动到v形腻子承接池81底部,为便于实现v形腻子承接池81底部的腻子的收集,在此,在本腻子机上还设置了一腻子循环输送机构,具体的,在所述v形腻子承接池81的内部下侧设置一第一螺旋输送蛟龙811,所述腻子循环输送机构包括导流槽821、料斗822、竖直螺旋输送蛟龙823、水平螺旋输送蛟龙824,所述导流槽821用于将第一螺旋输送蛟龙811的出料口流出的腻子导流到料斗72内,所述竖直螺旋输送蛟龙823用于将料斗 822内腻子输送到水平螺旋输送蛟龙824内,所述水平螺旋输送蛟龙824用于将其内腻子输送到腻子池3内,输送蛟龙为本领域内常用的腻子输送机构,故在此,对于第一螺旋输送蛟龙811、竖直螺旋输送蛟龙823、水平螺旋输送蛟龙824的具体结构,及竖直螺旋输送蛟龙 823与水平螺旋输送蛟龙824实现连接输送的具体实施方式均不再做详细描述;在刮腻子初始工作时,可将腻子放入到料斗822内,然后利用竖直螺旋输送蛟龙823和水平螺旋输送蛟龙824的运转,实现腻子池内腻子的初始注入。
33.在木板从上刮刀22及下刮刀24之间移出过程中,为实现木板两侧边粘附的腻子的刮取,在此,在所述上刮刀22和下刮刀24之间的出板口的两侧均设置一组侧边刮腻子机构,所述侧边刮腻子机构包括转轴91、侧边刮刀92、上侧边刮刀93、拉紧弹簧94,所述转轴91竖直设置在所述上刀架21前侧,且转轴91能够自由转动,所述侧边刮刀92和上侧边刮刀93设置在所述转轴91下部,侧边刮刀92及上侧边刮刀93呈相互垂直状态分布,侧边刮刀92及上侧边刮刀93在转轴91下部设置的具体实施方式,为本领域常规技术内容,故在此,不再做详细描述;侧边刮刀92用于木板的左侧面或右侧面的腻子刮取,上侧边刮刀93用于与木板的
左侧面或右侧面相邻的上平面的腻子刮取,所述拉紧弹簧94用于拉动所述转轴91,使得侧边刮刀92与对应的木板的左侧面或右侧面相贴合。
34.在木板从上刮刀22和下刮刀24之间移出的整个过程中,为便于实现木板在整个过程中的水平移动,以此保证上刮刀22和下刮刀24对木板的刮腻子效果,在此,在腻子池3的前侧设置一接板机构,从上刮刀22和下刮刀24之间移出的木板直接移动到所述接板机构上,所述接板机构包括条状输送带61、同步驱动轴62,若干条状输送带61沿着左右方向等间距设置在所述整机支架1上,所述同步驱动轴62用于驱动所述若干条状输送带61同步转动,条状输送带61的安装方式为本领内公知技术手段,故在此,对于条状输送带61在整机支架 1的具体安装方式不再做详细描述,同步驱动轴62实现若干条状输送带61同步转动的具体实施技术手段及同步驱动轴62被动力装置实现驱动的具体实施技术手段均为本来领域内公知技术,故在此,不再做详细描述。
35.本实用新型中,“左”、“右”均是为了方便描述位置关系而采用的相对位置,因此不能作为绝对位置理解为对保护范围的限制。
36.除说明书所述的技术特征外,均为本专业技术人员的已知技术。
37.以上所述结合附图对本实用新型的优选实施方式和实施例作了详述,但是本实用新型并不局限于上述实施方式和实施例,对于本技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1