一种传感器治具移动定位机构的制作方法
1.本实用新型涉及动态血糖传感器探针涂膜工艺领域,更具体的说涉及一种传感器治具移动定位机构。
背景技术:
2.动态血糖监测系统(rgms)是近年来投入临床使用的一种新型持续动态血糖监测系统,它连接一个探测头类似针头,探测头用于置入皮下组织。探测头直径很小,置入时患者无明显痛感和不适感。仪器间隔一定时间从探测头接受一次反映血糖变化的电信号,将多次采集到的电信号平均值转化成为血糖值存储起来。每天可以记录几百个血糖值。动态血糖监测仪还可以同时存储进餐、运动、用药等时间。这就可以让患者不用每天再忍受针扎的痛苦,并且它能提供每日血糖图,多日血糖图波动趋势分析和每日血糖数据的小结,是血糖检测的新突破。
3.其中传感器探针需要对针尖部位进行涂膜工艺处理,其中涂膜工艺通常将传感器探针固定在治具上,再将治具定位以及移动进行涂膜,从而确保涂膜精度以及涂膜工艺的一致性,并且提高涂膜效率。故急需设计一种传感器治具移动定位机构,保证传感器涂膜的质量并提高涂膜效率。
技术实现要素:
4.针对现有技术的不足之处本实用新型提供一种传感器治具移动定位机构,本实用新型的传感器治具移动定位机构将传感器治具安装在承载组件上后通过驱动组件的驱动实现定位,定位完成后再通过驱动组件的驱动向前移动进行涂膜工艺,驱动组件集成了定位驱动和移动驱动,结构简单、控制方便,确保传感器涂膜的质量并提高涂膜效率。
5.本实用新型的具体技术方案如下,一种传感器治具移动定位机构,安装于套涂腔体上,包括承载组件和驱动组件,所述承载组件位于所述套涂腔体内侧,所述驱动组件位于所述套涂腔体外侧,传感器治具安装于所述承载组件上,所述驱动组件具备驱动所述传感器治具夹紧定位的动作以及驱动所述传感器治具向所述套涂腔体内部移动的动作。
6.由此,所述传感器治具安装在所述承载组件上后通过所述驱动组件的驱动实现定位,定位完成后通过所述驱动组件的驱动向前移动进行涂膜工艺,所述驱动组件集成了定位驱动和移动驱动,结构简单、控制方便。
7.作为本实用新型的优选,所述承载组件包括承载座,所述承载座上表面设有横向延伸的承载槽,所述承载槽前侧设有向上延伸的前阻挡部,所述承载槽后侧设有向上延伸的后阻挡部以及由所述后阻挡部上方向前延伸的上阻挡部,所述前阻挡部、所述后阻挡部和所述上阻挡部将所述传感器治具间隙包覆于所述承载槽内。
8.由此,所述传感器治具能够从所述承载槽侧面横向装入,并且前后上下都能得到限位,起到初步定位的作用。
9.作为本实用新型的优选,所述后阻挡部内部设有滑槽,滑槽内安装有推块,所述推
块能够向所述承载槽方向滑动;所述推块前侧固定安装有定位销,所述定位销与所述传感器治具后侧的定位孔匹配;所述推块后侧向下弯折,弯折部内侧与所述承载座之间设有复位弹簧,所述承载座后侧还固接有限位座,所述推块弯折部外侧由所述限位座阻挡限位。
10.由此,所述推块向前移动时能够将所述传感器治具夹紧,并且使所述定位销插入所述传感器治具的定位孔内,保证所述传感器治具定位准确;所述驱动组件释放作用力时,所述推块能够在所述复位弹簧的复位弹力作用下恢复到初始位置,从而使所述定位销和所述传感器治具定位孔脱离,使得所述传感器治具能够被取下。
11.作为本实用新型的优选,所述推块与所述驱动组件连接。
12.由此,所述推块能够在所述驱动组件的作用下向前移动,从而对所述传感器治具进行定位。
13.作为本实用新型的优选,所述承载组件还包括连接座,所述连接座连接于所述承载座底部,并与所述驱动组件连接。
14.由此,所述驱动组件的驱动作用能够由所述连接座传递至所述承载座,从而能够使所述承载座整体前后移动,实现涂膜。
15.作为本实用新型的优选,所述驱动组件包括主伸缩缸、同步滑杆、同步安装座、副伸缩缸、连杆、主导向座和副导向座,所述主导向座和所述副导向座固定安装于所述套涂腔体外侧,所述主伸缩缸安装于所述主导向座中间部位,所述主导向座位于所述主伸缩缸两侧设有导向套,所述同步滑杆一端穿过所述导向套后和所述连接座连接,所述同步滑杆另一端和所述同步安装座连接。
16.由此,所述主伸缩缸的伸缩动作能够同时带动所述副伸缩缸移动,使得所述主伸缩缸的驱动动作和所述副伸缩缸的驱动动作相互独立,保证定位和移动互不影响;此外,通过所述主导向座和所述副导向座的导向作用能够使得驱动动作变的更加稳定。
17.作为本实用新型的优选,所述副伸缩缸伸缩端和所述连杆一端连接,所述连杆另一端穿过所述副导向座后和所述推块连接。
18.由此,所述副伸缩缸的伸缩动作通过所述连杆传递至所述推块。
19.作为本实用新型的优选,所述主伸缩缸为电缸,所述副伸缩缸为气缸。
20.由此,所述主伸缩缸需要精确控制所述传感器治具移动的距离,故采用电钢控制,并且电机采用步进电机,能够精确控制进给量;所述副伸缩缸只需提供给所述传感器治具一定的推力便可使其定位准确,故采用气缸速度更快、效率更高,并且成本更低。
21.作为本实用新型的优选,所述承载槽、所述前阻挡部、所述后阻挡部以及所述上阻挡部的边缘侧面与所述传感器治具交界的内侧面之间均设有倒角。
22.由此,所述传感器治具安装至所述承载槽时,所述倒角能够起到一定的导向作用。
23.综上所述,本实用新型具有以下有益效果:
24.本实用新型的传感器治具移动定位机构将传感器治具安装在承载组件上后通过驱动组件的驱动实现定位,定位完成后再通过驱动组件的驱动向前移动进行涂膜工艺,驱动组件集成了定位驱动和移动驱动,结构简单、控制方便,确保传感器涂膜的质量并提高涂膜效率。
附图说明
25.图1为本实用新型传感器治具移动定位机构的安装示意图;
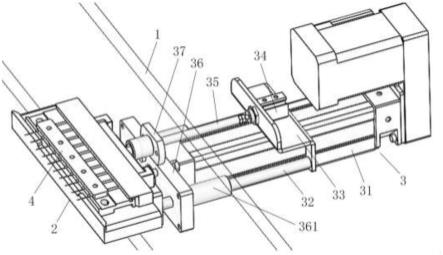
26.图2为本实用新型传感器治具移动定位机构的立体图;
27.图3为本实用新型传感器治具移动定位机构的剖视图;
28.图中,1-套涂腔体、2-承载组件、21-承载座、211-承载槽、212-前阻挡部、213-后阻挡部、214-上阻挡部、215-推块、216-定位销、217-复位弹簧、218-限位座、22-连接座、3-驱动组件、31-主伸缩缸、32-同步滑杆、33-同步安装座、34-副伸缩缸、35-连杆、36-主导向座、361-导向套、37-副导向座、4-传感器治具。
具体实施方式
29.下面将结合附图,通过具体实施例对本实用新型作进一步说明。
30.如图1、图2、图3,一种传感器治具移动定位机构,安装于套涂腔体1上,包括承载组件2和驱动组件3,承载组件2位于套涂腔体1内侧,驱动组件3位于套涂腔体1外侧,传感器治具4安装于承载组件2上,驱动组件3具备驱动传感器治具4夹紧定位的动作以及驱动传感器治具4向套涂腔体1内部移动的动作。
31.由此,传感器治具4安装在承载组件2上后通过驱动组件3的驱动实现定位,定位完成后通过驱动组件3的驱动向前移动进行涂膜工艺,驱动组件3集成了定位驱动和移动驱动,结构简单、控制方便。
32.如图1、图2、图3,承载组件2包括承载座21,承载座21上表面设有横向延伸的承载槽211,承载槽211前侧设有向上延伸的前阻挡部212,承载槽211后侧设有向上延伸的后阻挡部213以及由后阻挡部213上方向前延伸的上阻挡部214,前阻挡部212、后阻挡部213和上阻挡部214将传感器治具4间隙包覆于承载槽211内。
33.由此,传感器治具4能够从承载槽211侧面横向装入,并且前后上下都能得到限位,起到初步定位的作用。
34.如图1、图2、图3,后阻挡部213内部设有滑槽,滑槽内安装有推块215,推块215能够向承载槽211方向滑动;推块215前侧固定安装有定位销216,定位销216与传感器治具4后侧的定位孔匹配;推块215后侧向下弯折,弯折部内侧与承载座21之间设有复位弹簧217,承载座21后侧还固接有限位座218,推块215弯折部外侧由限位座218阻挡限位。
35.由此,推块215向前移动时能够将传感器治具4夹紧,并且使定位销216插入传感器治具4的定位孔内,保证传感器治具4定位准确;驱动组件3释放作用力时,推块215能够在复位弹簧217的复位弹力作用下恢复到初始位置,从而使定位销216和传感器治具4定位孔脱离,使得传感器治具4能够被取下。
36.如图1、图2、图3,推块215与驱动组件3连接。
37.由此,推块215能够在驱动组件3的作用下向前移动,从而对传感器治具4进行定位。
38.如图1、图2、图3,承载组件2还包括连接座22,连接座22连接于承载座21底部,并与驱动组件3连接。
39.由此,驱动组件3的驱动作用能够由连接座22传递至承载座21,从而能够使承载座21整体前后移动,实现涂膜。
40.如图1、图2、图3,驱动组件3包括主伸缩缸31、同步滑杆32、同步安装座33、副伸缩缸34、连杆35、主导向座36和副导向座37,主导向座36和副导向座37固定安装于套涂腔体1外侧,主伸缩缸31安装于主导向座36中间部位,主导向座36位于主伸缩缸31两侧设有导向套361,同步滑杆32一端穿过导向套361后和连接座22连接,同步滑杆32另一端和同步安装座33连接。
41.由此,主伸缩缸31的伸缩动作能够同时带动副伸缩缸34移动,使得主伸缩缸31的驱动动作和副伸缩缸34的驱动动作相互独立,保证定位和移动互不影响;此外,通过主导向座36和副导向座37的导向作用能够使得驱动动作变的更加稳定。
42.如图1、图2、图3,副伸缩缸34伸缩端和连杆35一端连接,连杆35另一端穿过副导向座37后和推块215连接。
43.由此,副伸缩缸34的伸缩动作通过连杆35传递至推块215。
44.如图1、图2、图3,主伸缩缸31为电缸,副伸缩缸34为气缸。
45.由此,主伸缩缸31需要精确控制传感器治具4移动的距离,故采用电钢控制,并且电机采用步进电机,能够精确控制进给量;副伸缩缸34只需提供给传感器治具4一定的推力便可使其定位准确,故采用气缸速度更快、效率更高,并且成本更低。
46.如图1、图2、图3,承载槽211、前阻挡部212、后阻挡部213以及上阻挡部214的边缘侧面与传感器治具4交界的内侧面之间均设有倒角。
47.由此,传感器治具4安装至承载槽211时,倒角能够起到一定的导向作用。
48.由此,套涂平衡流转平台21的移动不影响套涂工艺封闭仓1的密封性。
49.上面所述的实施例仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的构思和范围进行限定。在不脱离本实用新型设计构思的前提下,本领域普通人员对本实用新型的技术方案做出的各种变型和改进,均应落入到本实用新型的保护范围,本实用新型请求保护的技术内容,已经全部记载在权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1