用于电容式传感器或开关装置的微机械构件的制作方法
1.本发明涉及一种用于电容式传感器或开关装置的微机械构件和一种电容式传感器或开关装置。本发明也涉及用于电容式传感器或开关装置的微机械构件的制造方法以及用于制造电容式传感器或开关装置的方法。
背景技术:
2.在文献us 2014/0060169 a1中说明了一种电容式压力传感器,其具有直接或间接地在衬底的衬底表面上撑开的隔膜。连续开口构造在衬底上,该连续开口从衬底的从衬底表面离开定向的背侧延伸至隔膜的朝衬底定向的隔膜内侧。借助在衬底的背侧上作用的物理压力(该物理压力不等于在隔膜的从衬底离开定向的隔膜外侧上存在的参考压力),隔膜应是可拱曲的。电容式压力传感器也包括具有电极的跷板结构和固定在衬底表面上的对应电极。隔膜的拱曲应如此触发电极与对应电极的间距改变,使得在隔膜的隔膜外侧上的与参考压力不同的物理压力根据在电极和对应电极之间作用的电压的变化是可确定的。
技术实现要素:
3.本发明实现一种具有权利要求1特征的用于电容式传感器或开关装置的微机械构件、具有权利要求8特征的电容式传感器或开关装置、具有权利要求10特征的用于电容式传感器或开关装置的微机械构件的制造方法以及具有权利要求12特征的用于制造电容式传感器或开关装置的方法。
4.本发明的优点:
5.本发明涉及用于电容式传感器或开关装置的微机械构件或配备该微机械构件的电容式传感器或开关装置,其中,与现有技术相比可以省去至少通过相应的衬底连同在其衬底表面上撑开的隔膜的连续开口。此外,在根据本发明的微机械构件中可以将相应隔膜的无支撑区域的从衬底离开定向的隔膜外侧用作“敏感的隔膜面”,使得可以容易地用凝胶保护隔膜的“敏感的隔膜面”。与此相对地,以凝胶回填在现有技术中所需的连续空隙是非常困难和费事的。因此,本发明能实现成本有利地制造具有提高的寿命的微机械构件或者配备该微机械构件的电容式传感器或开关装置。
6.在微机械构件的一个有利实施方式中,至少一个第二电极构造为包括至少一个杠杆元件和至少一个连接的第一电极的跷板结构或与该跷板结构无关地连接在隔膜的无支撑区域的隔膜内侧上,使得在隔膜的无支撑区域拱曲的情况下使至少一个第一电极能够处于具有垂直于衬底表面定向的第一运动分量的第一调节运动中,并且使至少一个第二电极能够处于具有垂直于衬底表面定向并相反于第一运动分量指向的第二运动分量的第二调节运动中。微机械构件的在此所说明的实施方式的至少一个第一电极和至少一个第二电极的相反定向的运动分量简化了用于确定施加到隔膜的无支撑区域的隔膜外侧上的力或者相应于该力的物理参量或环境条件的分析评估。
7.至少一个杠杆元件例如可以通过各至少一个第一扭簧连接在隔膜的无支撑区域
的隔膜内侧上,通过各至少一个第二扭簧连接在衬底上或沉积在衬底表面上的至少一个层上;并且通过各至少一个第三扭簧连接在配属于该第三扭簧的第一电极上。所述至少一个杠杆元件因此能够简单地构造。
8.尤其可以给每个第一电极各配属至少两个杠杆元件,使得至少两个配属于第一电极的杠杆元件通过其第三扭簧与相应的第一电极连接,其中,至少两个配属于相同的第一电极的杠杆元件的所有第一扭簧相互平行错开地定向;至少两个配属于相同的第一电极的杠杆元件的所有第二扭簧相互平行错开地定向;并且至少两个配属于相同的第一电极的杠杆元件的所有第三扭簧相互平行错开地定向。在这种情况下,隔膜的无支撑区域的拱曲触发至少一个第一电极的(几乎)垂直于衬底表面定向的第一调节运动。
9.优选地,至少所述至少一个杠杆元件和所述至少一个第一电极由第一半导体和/或金属层构成,该第一半导体和/或金属层布置在衬底表面的从衬底离开定向的一侧上;而至少隔膜的无支撑区域由第二半导体和/或金属层构成,该第二半导体和/或金属层布置在第一半导体和/或金属层的从衬底离开定向的一侧上。在这种情况下,微机械构件能够借助可相对容易实施的制造方法来制造。
10.优选地,至少一个第一对应电极与所述至少一个第一电极相邻地直接或间接地布置在衬底表面上,和/或至少一个第二对应电极与所述至少一个第二电极相邻地直接或间接地布置在衬底表面上,其中,所述至少一个第一对应电极和/或所述至少一个第二对应电极由在衬底表面与第一半导体和/或金属层之间布置的电极材料层构成。由此也能够容易地实施至少一个第一对应电极和/或至少一个第二对应电极的有利布置。
11.在微机械构件的另一有利实施方式中,至少一个杠杆元件和连接在至少一个杠杆元件上的至少一个第一电极被框架结构围绕,隔膜在该框架结构上撑开,其中,被框架结构和隔膜包围的内部容积以位于其中的参考压力如此气密地密封,使得至少隔膜的无支撑区域借助在无支撑区域的隔膜外侧上作用的不等于参考压力的物理压力是可拱曲的。微机械构件的在此所说明的实施方式因此可有利地用于电容式压力传感器。
12.上述优点也在具有这种微机械构件的电容式传感器或开关装置中得到确保。例如设计为电容式压力传感器装置的电容式传感器或开关装置的微机械构件具有在之前段落中所说明的特征并且包括分析评估电子器件,该分析评估电子器件设计为用于至少在考虑关于在至少一个第一电极和至少一个第一对应电极之间作用的电压的当前求出的测量参量的情况下确定和输出关于相应地在隔膜的无支撑区域的隔膜外侧上存在的物理压力的测量值。
13.上述优点也通过实施用于电容式传感器或开关装置的微机械构件的相应的制造方法引起。同样地,这些优点通过实施用于制造电容式传感器或开关装置的对应的方法实现。在此明确指出,根据微机械构件和电容式传感器或开关装置的上述实施方式可以扩展在此列举的方法。
附图说明
14.在下面根据附图阐述本发明的另外的特征和优点。附图示出了:
15.图1微机械构件的第一实施方式的示意图;
16.图2a和2b微机械构件的第二实施方式的示意图;
17.图3a和3b微机械构件的第三实施方式的示意图;
18.图4a和4b微机械构件的第四实施方式的示意图;
19.图5用于阐述制造方法的第一实施方式的流程图;和
20.图6用于阐述制造方法的第二实施方式的流程图。
具体实施方式
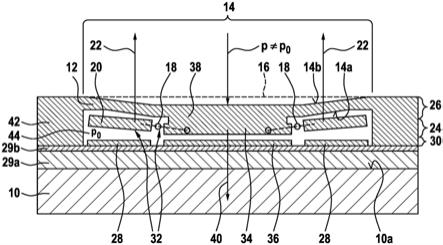
21.图1示出微机械构件的第一实施方式的示意图。
22.在图1中示意性示出的微机械构件包括具有衬底表面10a的衬底10,该衬底例如可以是半导体衬底、尤其是硅衬底。然而应指出,代替硅或作为对硅的补充,衬底10还可以包括至少另一种半导体材料、至少一种金属和/或至少一种电绝缘的材料。
23.微机械构件的直接或间接地在衬底表面10a上撑开的隔膜12具有无支撑区域14,该无支撑区域具有朝衬底10定向的隔膜内侧14a和从衬底10离开指向的隔膜外侧14b。如在图1中可看到,隔膜12的无支撑区域14借助施加到隔膜外侧14b上的(未绘制出的)力是可拱曲的。为了比较,借助虚线16描述出在隔膜侧14a和14b上存在力平衡情况下的无支撑区域14的存在的初始形状。
24.微机械构件也包括至少一个杠杆元件18和至少一个连接在至少一个杠杆元件18上的第一电极20。至少一个杠杆元件18分别这样地连接在隔膜12上,使得在隔膜12的无支撑区域14拱曲的情况下,所述至少一个杠杆元件18处于/能够处于旋转运动中。借助至少一个杠杆元件18的旋转运动,至少一个连接的第一电极20处于/能够处于相对于衬底表面10a倾斜定向的第一调节运动22中。尤其可以将隔膜12的无支撑区域14的拱曲转变为至少一个第一电极20的(几乎)垂直于衬底表面10a定向的第一调节运动22。至少一个第一电极20的第一调节运动22因此不必理解为“翻转运动”。优选地,使至少一个第一电极20在无支撑区域14的隔膜外侧14b朝向衬底10拱入的情况下处于从衬底10离开定向的第一调节运动22中(参见图1),而使至少一个第一电极20在无支撑区域14的隔膜外侧14b从衬底10离开定向地拱出的情况下处于朝向衬底10指向的(未绘制出的)第一调节运动中。
25.此外,至少一个杠杆元件18和至少一个连接在至少一个杠杆元件18上的第一电极20设置在衬底表面10a与隔膜12的无支撑区域14的隔膜内侧14a之间。隔膜12的无支撑区域14的隔膜外侧14b因此可以毫无问题地被用作用于探测/测量的“敏感的隔膜面”。因此不需要构造至少通过衬底10用于实现测量入口的连续开口,这根据现有技术在将无支撑区域14的隔膜内侧14a用作“敏感的隔膜面”的情况下是需要的。附加地可以比无支撑区域14的隔膜内侧14a更简单地借助凝胶保护无支撑区域14的隔膜外侧14b。尤其如在图1中可看到,无支撑区域14的隔膜外侧14b封闭微机械构件的从衬底10离开定向的表面,这附加地简化将凝胶施加到隔膜外侧14b上。借助简化地施加凝胶而改善对微机械构件的“敏感的隔膜面”的保护有助于有利地提升该微机械构件的寿命。
26.微机械构件的另一优点在于,(至少)所述至少一个杠杆元件18和所述至少一个第一电极20可以由第一半导体和/或金属层24构成,该第一半导体和/或金属层布置在衬底表面10a的从衬底10离开定向的一侧上。附加地,至少隔膜12的无支撑区域14可以由第二半导体和/或金属层26构成,第二半导体和/或金属层布置在第一半导体和/或金属层24的从衬底10离开定向的一侧上。整个隔膜12尤其可以由第二半导体和/或金属层26构成。微机械构
件因此能够较简单和相对成本有利地制造。
27.优选地,至少一个第一对应电极28与至少一个第一电极20相邻地直接或间接地布置在衬底表面10a上。至少一个第一对应电极28例如可以构造在至少一个覆盖衬底表面10a的层29a和29b、例如至少一个绝缘层29a和29b上。至少一个第一对应电极28可以由布置在衬底表面10a与第一半导体和/或金属层24之间的电极材料层30构成。这简化了微机械构件(至少)配备有共同作用的电极20与28。
28.在此所说明的实施方式中,至少一个杠杆元件18和至少一个第一电极20是跷板结构32的一部分,所述跷板结构连接在无支撑区域14的隔膜内侧14a上。跷板结构32在隔膜12的无支撑区域14拱曲的情况下处于/能够处于摇摆运动/翻转运动中,其中至少一个杠杆元件18实施其旋转运动。优选地,整个跷板结构32由第一半导体和/或金属层24构成。然而应指出,也可以省去将至少一个杠杆元件18和至少一个第一电极20构造为跷板结构32的一部分。
29.作为有利的扩展方案,微机械构件还可以具有至少一个第二电极34,该第二电极构造为跷板结构32的一部分或与跷板结构32无关地连接在隔膜12的无支撑区域14的隔膜内侧14a上。如果微机械构件构造为具有至少一个第二电极34,则至少一个第二对应电极36也可以与至少一个第二电极34相邻地直接或间接布置在衬底表面10a上。优选地,至少一个第二对应电极36也由电极材料层30构成。这简化了微机械构件配备有共同作用的电极对20和28、34和36。
30.仅示例性地,在图1的实施方式中,至少一个第二电极34借助构造在无支撑区域14的隔膜内侧14a上的加强结构38悬接在隔膜12上。在隔膜12的无支撑区域14拱曲的情况下,至少一个第一电极20处于/能够处于具有垂直于衬底表面10a定向的第一运动分量的第一调节运动22中,而使至少一个第二电极34处于/能够处于具有垂直于衬底表面10a定向并相反于第一运动分量定向的第二运动分量的第二调节运动40中。在该情况下可以说至少一个第一电极20和至少一个第二电极34关于其对应电极28和36“完全差异(volldifferentielle)的布置”。下面还讨论“完全差异的布置”的优点。至少一个第一电极20的第一调节运动22和至少一个第二电极34的第二调节运动40可以尤其垂直于衬底的衬底表面10a并且相对彼此相反指向地定向。
31.在此所说明的微机械构件有利地可以用作电容式传感器或开关装置的一部分。例如配备有在此所说明的微机械构件的电容式传感器装置可以包括至少一个(未示出的)分析评估电子器件,该分析评估电子器件设计为用于至少在考虑关于在至少一个第一电极20和至少一个第一对应电极28之间作用的第一电压的当前求出的测量参量(以及可能关于在至少一个第二电极34和至少一个第一对应电极36之间作用的第二电压的当前求出的另一测量参量)的情况下确定测量值,该测量值描述了作用到无支撑区域14的隔膜外侧14b上的力或相应于该力的物理参量或环境条件。然而,微机械构件也可以构造为麦克风或开关装置。一个/多个测量参量可以相应地理解为例如电势、电流或电荷。
32.在图1的实施方式中,跷板结构32被框架结构42围绕,隔膜12在该框架结构上撑开。被框架结构42和隔膜12包围的内部容积44以位于其中的参考压力p0如此气密地密封,使得至少隔膜12的无支撑区域14借助作用到无支撑区域14的隔膜外侧14b上不等于参考压力p0的物理压力p是可拱曲的。在这种情况下,分析评估电子器件设计为用于至少在考虑关
于在至少一个第一电极20和至少一个第一对应电极28之间作用的第一电压的当前求出的测量参量(以及可能关于在至少一个第二电极34和至少一个第一对应电极36之间作用的第二电压的当前求出的另一测量参量)的情况下确定和输出关于相应地在隔膜12的无支撑区域14的隔膜外侧14b上存在的物理压力p的测量值。
33.图2a和2b示出微机械构件的第二实施方式的示意图。
34.如在图2a中可看到,至少一个杠杆元件18可以通过各自至少一个第一扭簧50连接在隔膜12的无支撑区域14的隔膜内侧14a上。至少一个杠杆元件18也可以通过各自至少一个第二扭簧52锚定在衬底10上或沉积在衬底表面10a上的至少一个层29a和29b上。借助至少一个杠杆元件18不但到无支撑的区域14的隔膜内侧14a上而且(直接或间接地)到衬底10上的这种连接可以引起隔膜的无支撑区域14的拱曲触发至少一个杠杆元件18所希望的旋转运动,优选地绕着平行于衬底的衬底表面10a和/或垂直于相应的杠杆元件18定向的旋转轴线。此外,至少一个杠杆元件18可以通过各至少一个第三扭簧54连接在配属于该第三扭簧的第一电极20上。因此,将至少一个杠杆元件18的旋转运动转变为至少一个连接的第一电极20的所希望的第一调节运动22。
35.优选地,给每个第一电极20配属各至少两个杠杆元件18,使得至少两个配属于该第一电极的杠杆元件18通过其第三扭簧54与相应的第一电极20连接。在这种情况下有利的是,至少两个配属于相同的第一电极20的杠杆元件18的所有第一扭簧50相互平行错开地定向;至少两个配属于相同的第一电极20的杠杆元件18的所有第二扭簧52相互平行错开地定向;并且至少两个配属于相同的第一电极20的杠杆元件18的所有第三扭簧54相互平行错开地定向。隔膜12的无支撑区域14的拱曲在这种情况下触发至少一个第一电极20的(几乎)垂直于衬底表面定向的第一调节运动。至少一个第一电极20的第一调节运动因此导致在至少一个第一电极20和至少一个所配属的第一对应电极28之间存在的第一电容的显著的第一电容变化。
36.关于图2a和2b的微机械构件的另外的特征参照之前所阐述的实施方式。
37.图3a和3b示出微机械构件的第三实施方式的示意图。
38.在图3a和3b中示意性描述的微机械构件与前述实施方式的区别在于,在无支撑区域14的隔膜内侧14a上和无支撑区域14的隔膜外侧14b上存在力平衡的情况下,如果隔膜12的无支撑区域14存在于其借助虚线16描述的初始形状中,则至少一个第一电极20与至少一个所属的第一对应电极28存在第一间距d1(p=p0),该第一间距不等于至少一个第二电极34与至少一个所属的第二对应电极36的第二间距d2(p=p0)。尤其,在隔膜内侧14a和隔膜外侧14b上存在力平衡的情况下,至少一个第二电极34和至少一个所属的第二对应电极36之间的第二间距d2(p=p0)可以大于至少一个第一电极20和至少一个所属的第一对应电极28之间的第一间距d1(p=p0)(参见图3a)。
39.在隔膜内侧14a和隔膜外侧14b上存在力平衡的情况下,第二间距d2(p=p0)和第一间距d1(p=p0)之间存在的差可以如此确定,使得在物理压力p等于微机械构件的所谓的工作压力p
work
时相对于其对应电极28和36这样地调节电极20和34,使得在至少一个第一电极20和至少一个所属的第一对应电极28之间的第一间距d1(p=p
work
)(几乎)等于在至少一个第二电极34和至少一个所属的第二对应电极36之间的第二间距d2(p=p
work
)(参见图3b)。工作压力p
work
可以理解为(平均)压力,该压力在微机械构件运行期间正态地或在时间
上求平均地在隔膜外侧14b上存在。
40.第二间距d2(p=p0)与第一间距d1(p=p0)之间差的确定如在之前段落中所说明的那样导致,在隔膜外侧14b上与工作压力p
work
(略微)不同的物理压力p的情况下,不但在至少一个第一电极20和至少一个所属的第一对应电极28之间存在的第一电容的第一电容变化而且在至少一个第二电极34和至少一个所属的第二对应电极36之间存在的第二电容的第二电容变化分别是与物理压力p和工作压力p
work
的偏差有关的(几乎)线性的信号。此外,在这种情况下,衬底10的弯曲经常引起第一电容的第一电容变化,该第一电容变化的量值(几乎)等于第二电容的第二电容变化的量值,其中,各电容变化具有不同符号。因此,借助形成差值可以容易地“过滤出”由衬底10的弯曲产生的第一电容与第二电容的电容变化。
41.关于图3a和3b的微机械构件的另外的特征参照之前所阐述的实施方式。
42.图4a和4b示出微机械构件的第四实施方式的示意图。
43.如根据借助图4a和4b示意性描述的微机械构件可看到,至少一个第一电极20、至少一个第二电极34、至少一个第一对应电极28和至少一个第二对应电极36也可以分布到多个彼此空间分离的子电极区域中。此外,隔膜12或者其无支撑区域14可以构造为“长形的隔膜”。沿着隔膜12的纵向方向56,第一电极20和第二电极34可以如此相互交替,使得各一个第二电极34布置在两个相邻的第一电极20之间,并且各一个第一电极20布置在两个相邻的第二电极34之间(参见图4b)。相应地,沿着隔膜12的纵向方向56,第一对应电极28和第二对应电极36也可以如此相互交替,使得各一个第二对应电极36布置在两个相邻的第一对应电极28之间,并且各一个第一对应电极28布置在两个相邻的第二对应电极36之间。尤其,微机械构件能够关于一对称平面完全对称,隔膜12的纵向方向56位于该对称平面内。以这种方式可以实现,衬底10的弯曲经常触发第一电容的第一电容变化,该第一电容变化的量值(几乎)等于同样触发的第二电容的第二电容变化的量值,其中,各电容变化具有不同符号。
44.关于图4a和4b的微机械构件的另外的特征参照之前所阐述的实施方式。
45.在所有上述微机械构件中,存在至少一个第一电极20和至少一个第二电极34关于其对应电极28和36“完全差异的布置”。因此,可以借助由第一电容和第二电容的差值形成来描述作用到无支撑区域14的隔膜外侧14b上的力或相应于力的物理参量或者环境条件的测量值的确定。由该差值形成获得的信号比仅由第一电容的第一电容变化或仅由第二电容的第二电容变化获得的比较信号大系数2。电极20和34的“完全差异的布置”因此可以用于微机械构件的微型化,同时保留其灵敏度和/或其测量精度。相应地,“完全差异的布置”也可以用于提高微机械构件的灵敏度和/或测量精度,同时保留其结构大小。为了分析评估在此所说明的微机械构件,因此可以利用简单的、需要少量结构空间和成本有利的分析评估电子器件。
[0046]“完全差异的布置”和由第一电容和第二电容形成差值的另一优点在于,自动“过滤出”温度偏移。此外“完全差异的布置”和差值形成如上面已经所阐述地那样有助于“过滤出”可归因于衬底10的弯曲的测量误差。
[0047]
图5示出用于阐述制造方法的第一实施方式的流程图。
[0048]
借助在此所说明的制造方法可以生产用于电容式传感器或开关装置的微机械构件。在制造方法的一个方法步骤s1中,如此构造直接或间接地在衬底的衬底表面上撑开的、具有无支撑的区域的隔膜(该无支撑区域具有朝衬底定向的隔膜内侧和由衬底离开指向的
隔膜外侧),使得隔膜的无支撑区域借助施加到隔膜外侧上的力是可拱曲的。
[0049]
在一个方法步骤s2中构造至少一个杠杆元件和至少一个连接在该至少一个杠杆元件上的第一电极,其中,至少一个杠杆元件如此连接在隔膜上,使得在隔膜的无支撑区域拱曲的情况下所述至少一个杠杆元件处于旋转运动中,由此使所述至少一个连接的第一电极处于相对于衬底表面倾斜定向的第一调节运动中。此外,所述至少一个杠杆元件和所述至少一个连接在该至少一个杠杆元件上的第一电极布置在衬底表面与隔膜的无支撑区域的隔膜内侧之间。
[0050]
方法步骤s1和s2可以以任意顺序或者在时间上交叉地实施。优选地,至少所述至少一个杠杆元件和所述至少一个第一电极由第一半导体和/或金属层构成,该第一半导体和/或金属层布置在衬底表面的由衬底离开指向的一侧上。附加地,至少隔膜的无支撑区域可以由第二半导体和/或金属层构成,该第二半导体和/或金属层布置在第一半导体和/或金属层的由衬底离开指向的一侧上。
[0051]
图6示出用于阐述制造方法的第二实施方式的流程图。
[0052]
该进一步所描述的制造方法是之前所阐述的方法的扩展方案。
[0053]
在制造方法的在此所说明的实施方式中,首先在(可选的)方法步骤s3中将至少一个层、例如至少一个绝缘层沉积在衬底的衬底表面上。可选地,也可以构造至少一个层/绝缘层,例如以便在衬底上形成用于微机械构件的至少一个随后构造的电极构件的触点。
[0054]
在(可选的)方法步骤s4中,将电极材料层沉积在衬底表面或至少一个布置在衬底表面上的层上。例如,掺杂的多晶硅层可以作为电极材料层被沉积。在另一(可选的)方法步骤s5中,然后从电极材料层构造出至少一个对应电极。可选地,除至少一个对应电极外,也可以从电极材料层构造至少一个导体线路。
[0055]
作为(可选的)方法步骤s6,紧接着可以沉积腐蚀停止层、优选是电绝缘的腐蚀停止层。可以构造例如“富含硅”的氮化物层作为腐蚀停止层。
[0056]
在紧接着的(可选的)方法步骤s7中,沉积牺牲层、优选是氧化层。借助构建牺牲层可以可选地确定至少一个杠杆元件和至少一个连接在该至少一个杠杆元件上的第一电极的形状,杠杆元件和第一电极随后在方法步骤s2中构造。可选地,也可以在方法步骤s7中沉积和构建两个牺牲层,由此也可以调整在借助在此所说明的制造方法构造的电极结构之间的上述不同的间距d1(p=p0)和d2(p=p0)。
[0057]
此后,在方法步骤s8中沉积第一半导体和/或金属层。优选地,作为第一半导体和/或金属层沉积多晶硅层。优选地,构造具有至少500nm(纳米)的第一层厚度的第一半导体和/或金属层。此后,实施上述方法步骤s2,由此,至少所述至少一个杠杆元件和所述至少一个第一电极由第一半导体和/或金属层构成。为了构建第一半导体和/或金属层,优选实施腐蚀方法,该腐蚀方法如例如沟槽方法(trenchverfahren)那样引起垂直的腐蚀沟槽。在腐蚀第一半导体和/或金属层时,优选在第一半导体和/或金属层的第一层厚下方腐蚀出具有腐蚀宽度的非常窄的沟槽。这简化了在构建的第一半导体和/或金属层上的另外的层沉积。
[0058]
在另一(可选的)方法步骤s9中,沉积绝缘层、优选是氧化层。绝缘层的绝缘层厚度可以选择得大于第一半导体和/或金属层的第一层厚度的一半,以便回填在方法步骤s2中形成的狭窄的腐蚀沟槽,其中,可能包含空腔。借助构建绝缘层,可选地可以确定隔膜和/或至少一个“悬接”在隔膜的隔膜内侧上的随后在方法步骤s1中形成的部件的形状。此外,可
以在绝缘层中产生狭窄的“缝隙”,通过该缝隙借助各向同性的腐蚀在第一半导体和/或金属层下方腐蚀出牺牲层的一部分。以这种方式可以在牺牲层中形成空腔,该空腔在随后实施的牺牲层腐蚀期间引起腐蚀介质的有针对性的扩散。“缝隙”紧接着可以借助另一氧化物沉积封闭。
[0059]
第二半导体和/或金属层现在作为方法步骤s10被沉积。优选构造多晶硅层作为第二半导体和/或金属层。第二半导体和/或金属层的第二层厚度优选位于第一半导体和/或金属层的第一层厚度的约55%至75%。此后,实施上述方法步骤s1。可选地,也通过第二半导体和/或金属层构建用于紧接着实施牺牲层腐蚀的至少一个腐蚀入口。
[0060]
作为(可选的)方法步骤s11,然后实施上述牺牲层腐蚀,其中,借助牺牲层腐蚀优选地完全除去牺牲层。以这种方式使在方法步骤s2中由第一半导体和/或金属层构成的部件露出。作为牺牲层腐蚀例如可以用氟化氢(hf)实施气相腐蚀方法。
[0061]
至少一个用于实施牺牲层腐蚀的腐蚀入口可以紧接着在(可选的)方法步骤s12中被封闭。以这种方式可以调整作为微机械构件中的内部压力的限定的参考压力。可以借助在低压下的化学气相沉积(low pressure chemical vapour deposition、lpcvd)或借助等离子增强化学气相沉积(plasma
‑
enhanced chemical vapour deposition、pecvd)实现至少一个腐蚀入口的封闭。在此,例如可以沉积氧化层和/或(富含硅)的氮化物层。
[0062]
在此指出,制造方法的上述方法步骤s1至s12不应解读为最终的。
[0063]
上述制造方法也可以是用于制造电容式传感器或开关装置的方法的组成部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1